
�����S�C���Ƒ�(y��ng)�� �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
�l(f��)؛���c���㽭ʡ������
�l(f��)���r�g��2025-05-28

�l(f��)؛���c���㽭ʡ������
�l(f��)���r�g��2025-05-28
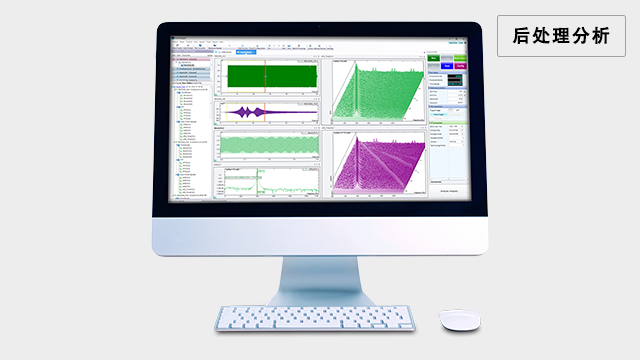
���r��(sh��)�֞V�����Á팍�r���^�V���y������̖���Ñ������Զ��x,���V���������ԝM������đ�(y��ng)�õ�����,�����r��(sh��)�֞V������(y��ng)���ڔ�(sh��)��(j��)�{(di��o)��(ji��)�A�Ρ���(sh��)�֞V����ģʽ�x����ͨ�^�D�λ����O(sh��)Ӌ���߁��M���O(sh��)�õ�,��Ȼ���ς����O(sh��)���Թ����rӋ�㡣���@���D�λ��O(sh��)Ӌ������,���V�����v�S��dB���λ,���M�S������(y��ng)�l�ʡ�����,���Ñ�������Ҫ�鿴һ���ض��l�ʎ�����(n��i)�������ֲ�,�������������l�V���@����ͨ�^��(chu��ng)����ͨ�V����Ȼ��RMS���ӑ�(y��ng)���ڞV������ݔ�������,���D�@ʾ��������EDMܛ���ж��x���r�^�V�������̈D,�����(c��)�ĈD��(bi��o)CH1��ʾ��Ҫ���y����ԭʼ�r����̖�����B�ӵ�һ��IIR�V����,��IIR�V����Ӌ��һ������iirfilter(ch1)����̖,��ԓ��̖���B�ӵ�RMS���ӡ�RMS���ӵ�ݔ��rms(iirfilter(ch1))����̖,�� �S�C����ṩ���_,�����r�Ķ�ͨ�����ƺͷ����������S�C���Ƒ�(y��ng)��

��·�V��,�����y�Y(ji��)��(g��u)���A(y��)���x�ĕr�����M�м���,��ͨ�^�y�����y��Ԫ��푑�(y��ng)�����]�h(hu��n)���{(di��o)��ݔ����̖,��ʹ��ݔ����̖�c�A(y��)���x�IJ��α���һ��,��·�V�ɼ�ϵ�y(t��ng)���㷨����c��(j��ng)��_���yԇ���㷨����·�V��,�����Ա��沢�جF(xi��n)�����r����,���yԇ����Ӌ���ϵ�y(t��ng)���}�_푑�(y��ng)��ԓӋ�㷽���c��(j��ng)��_���yԇ���,�����O(sh��)��Ӝyԇϵ�y(t��ng)�Ǿ��Ե�,����ζ���κ�ݔ���푑�(y��ng)������ͨ�^�l��푑�(y��ng)����(sh��)FRF���A(y��)�y��������^����,��ԓFRF������M���A(y��)������,����Ӌ��ϵ�y(t��ng)��ݔ���(q��)����̖��ԓݔ�����α��ʹ����̖�c�A(y��)���x������ƥ��,��Ȼ��,��������������ԓ�I(l��ng)��IJ��ζ�������·�V�ɼ�,�����������(����λ�ƺ��ٶ�����)�����ܕ����K��Ӄx�ɼ����֬F(xi��n)����(sh��)��(j��)���_��,�����˽�Q�@�����},�����@�x���_�l(f��)���ξ��������ξ�����һ��������Ĺ���,�����ṩ��Ӝyԇϵ�y(t��ng)��VCS��·�VTWR���ξ�����,�����S�����T���������лֵIJ��Σ�ʹ���܉�����Ӄx���ܷ�����(n��i),��ͬ�r���֔�(sh��)��(j��)��(n��i)�����w�Π�,���L�Ⱥ�˲�B(t��i)�� �����S�C���Ƒ�(y��ng)��ʹ��CoCo80�O(sh��)���B(t��i)�O(ji��n)�y�x�����L(f��ng)���l(f��)늙C�M�o���h�̱O(ji��n)��,��

�oՓ����ͬһ��Spiderǰ��߀���ڲ�ͬ��ǰ��,�����_�ĕr�gͬ��ʹ������ͨ��֮�g���l����λƥ��dz��á��ڲ�ͬ��Spiderǰ��֮�g,��ͨ����λƥ��飨��20kHz������(n��i)��,���m������Ҫ��ͨ���y���ĸ��|(zh��)���Y(ji��)��(g��u)���W(xu��)��(y��ng)�á�������Ҫһ������ݔ��Դ��MIMO��Ӻ�MIMOģ�B(t��i)�yԇ��,��Spider-80M߀���Џ����`��Ĕ�(sh��)��(j��)�ɼ�����,���B�m(x��)�r�g��(sh��)��(j��)ӛ䛺��l�V�����������S���l���l(f��)�𣬰����Ñ�����,���A(y��)���\��Ӌ��,���������|�l(f��)����ݔ���|�l(f��)����(sh��)��ݔ���|�l(f��)��,���߂�һ�������ܵ�,��Ĭ�J����250GB��ӛ䛕r����(sh��)��(j��)����NTFS�ļ���ʽ���룩,��ʹ��PC��ܛ���Ɍ���(sh��)��(j��)��Ӳ�P�Ђ�ݔ?sh��)�PC,��
Spider-80SG�Ę�·У��(zh��n)��?q��)�ʹ�÷��㲢�����^���`���ԡ���·У��(zh��n)�o����Ӿ�·,��ȫ���ǃ�(n��i)���Ԅ���ɵ�,�����ژ�·У��(zh��n)�Ę�·���,���Ñ������x���κ�һ�������Ę��,��**�K����·��茢�c����B��,������,���@�N�`����ʹ���Ñ��܉�ʹ��Spider-80SG��·�����κ��Լ��O(sh��)���Ę�·��衣���������еđ�(y��ng)׃ʽ���O(sh��)Ӌһ��,������,���S�ͬ���������еIJ�ͬ��ģ�ͺ����,���@���Ǟ�ʲôSpider-80SG���S�Ñ���ÿ��ݔ��ͨ����ÿ��**����Զ��x늉������λƫ���nj���(bi��o)�����ܼ�����Spider-80SGܛ������,���@��ʹ�ò���������,��������Ҫ�����nj���(y��ng)׃�x�B�ӵ�Spider-80SG����λƫ�ƹ���,��Spider-80SG���Ԅ�̎�����,�� �Y(ji��)��(g��u)ƣ�ڵ�Чԇ�FDS��
�S��܉�E�ڕr����ʹ�Ãɂ���(sh��)��(j��)ͨ�����@ʾ,�����ԃɂ�ͨ������̖�L����X��Yƽ����,�����@ʾ�Sλ��׃���c���D(zhu��n)�Ƕȵ��P(gu��n)ϵ���S��܉�E�@ʾ�o�������D(zhu��n)�S�\�ӵĶ��Sҕ�X�D��,��ԓ����λ�ڄӑB(t��i)��̖����ϵ�y(t��ng)�еĺ�̎��ܛ����PA���С�һ��ƽ�����õ��S,�����κη������Ƅ�,�������ڣ��S��܉�E���D���g�a(ch��n)��һ���c���S�\�ӿ��Խo�����Դ��ָʾ,����������кܶ���/���\��,�������ǙC���]�ДQ�o��Ҫ��(chu��ng)��܉�E�D,������Ҫ�����pͨ��ͬ�r�y��ˮƽ�S�ʹ�ֱ�S�ϵĔ�(sh��)��(j��),��λ�ƻ���ٶȂ�����λ�ñ����g��90�㡣�S��܉�E�@ʾ���Õr���еĜy����,��������Ҫ�A�μ��g(sh��),�� ��̎������ϵ�y(t��ng)��PA,��������Ӝyԇ���ƃx
Ժʹ��CoCo80��ӜyԇѲ�z�x��GIS�M����әz�y�c������,�������S�C���Ƒ�(y��ng)��
EDM�CRCM��Uչ�ӑB(t��i)��̖����(DSA)�Ĺ��ܡ��@Щ�����cSpiderƽ�_���ɏĶ��܉�?q��)��h�̃x�����O(sh��)���M�пɿ��ıO(ji��n)�y,��ͨ�^ʹ�÷�C��(sh��)��(j��)�B�ӵ��Ƅӟo���W(w��ng)�P(gu��n),��EDM�CRCM�����h���B���ɶ��_Spider�M�ɵİ�������ͨ������(sh��)��Spiderϵ�y(t��ng)��EDM�CRCMܛ������ͨ�^һ���o�B(t��i)����IP��ַ�L��ÿһ��Spiderϵ�y(t��ng),�����ßo���ƄӾW(w��ng)�P(gu��n)�ṩ���o�B(t��i)����IP��ַ�ɴ_��ȫ����(n��i)���h���B��,��EDM�CRCMܛ��ͨ�^���ص��O(sh��)Ӌ�����˞�������ص�Spiderǰ���ṩ��Ҫ��(sh��)��(j��)��***�Y(ji��)����,��߀����ͬ�r�B�Ӷ������Spiderϵ�y(t��ng),��ԓܛ�����Ը���(j��)��Ҫ�ṩ�����κ�Spiderϵ�y(t��ng)�Č��r��(sh��)��(j��)ҕ�D��Ҳ���ԏ�����Spiderǰ�����dӛ��ļ��Թ��Mһ���������Ɣ�,�� �����S�C���Ƒ�(y��ng)��
 ����16ͨ�������� �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
����16ͨ�������� �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
���h
 �|��32ͨ�������O(sh��)��S�� �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
�|��32ͨ�������O(sh��)��S�� �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
���h
 �����S�C����ϵ�y(t��ng) �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
�����S�C����ϵ�y(t��ng) �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
���h
 ����������_����Դ�^�S�� �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
����������_����Դ�^�S�� �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
���h
 �ӱ�16ͨ�����ƃx���S�� �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
�ӱ�16ͨ�����ƃx���S�� �����J�_��(sh��)�ּ��g(sh��)����(y��ng)
���h