振動(dòng)故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)價(jià)格
標(biāo)準(zhǔn)壓電式加速度傳感器三角剪切結(jié)構(gòu),,基座應(yīng)變小,,溫度瞬態(tài)響應(yīng)低,敏感元件為高穩(wěn)定的特種陶瓷或石英,,靈敏度穩(wěn)定性好,。傳感器采用兩端 M5 螺孔設(shè)計(jì),便于背對背標(biāo)定,。1.測量通道數(shù)量:四通道,、八通道、十六通道,、傳感器同時(shí)數(shù)據(jù)信號采集,。2.支持傳感器類型:壓電式傳感器振動(dòng),噪聲聲級計(jì),,轉(zhuǎn)速計(jì)(*四通道),、電壓型輸出傳感器。3.數(shù)模轉(zhuǎn)換器精度:24AD位,。4.支持比較高采樣頻率:比較高100kHz/通道,,多種量程范圍可選。5.輸入精度:相位:優(yōu)于0.1度,,幅值:優(yōu)于0.1%,。6.儀器比較高動(dòng)態(tài)范圍:110dB。故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)的應(yīng)用領(lǐng)域廣,。振動(dòng)故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)價(jià)格
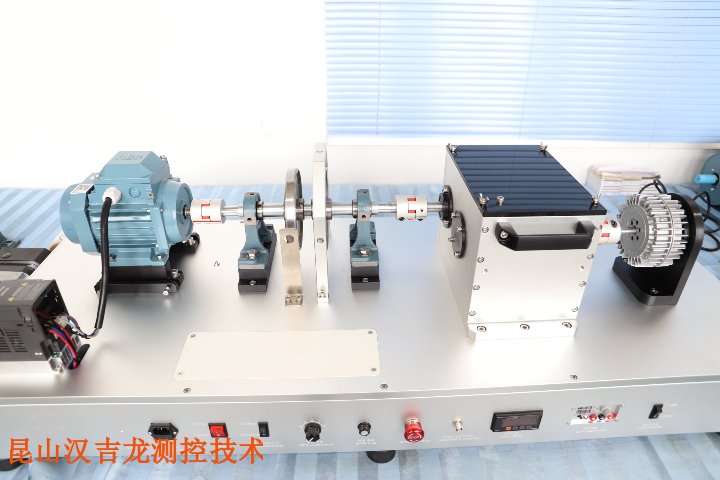
故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)
現(xiàn)有方法對強(qiáng)噪聲背景下的弱信號的分析不是很理想,,提出一種循環(huán)相位網(wǎng)絡(luò)來分析高斯白噪聲下的微弱周期信號,循環(huán)相位網(wǎng)絡(luò)在一定信噪比范圍內(nèi)相比于其他微弱信號檢測法能更好的提取微弱信號相關(guān)信息,,且計(jì)算量小,,相關(guān)理論簡單,適應(yīng)于對微弱信號的快速檢測,。為了進(jìn)一步減少計(jì)算量,,引入了微弱信號存在性檢測法濾除純高斯噪聲信號,經(jīng)實(shí)驗(yàn)驗(yàn)證微弱信號存在性檢測法與循環(huán)相位網(wǎng)絡(luò)相結(jié)合,,對強(qiáng)噪聲背景下的微弱周期信號分析具有良好的效果江西故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)定制故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)的實(shí)驗(yàn)結(jié)果具有重要意義,。
HOJOLO聲壓法測定聲功率包含:工程法、簡易法,、消聲室和半消聲室精密法,,可進(jìn)行背景噪聲、環(huán)境聲場等修正?聲強(qiáng)法測定聲功率包含離散點(diǎn)測量法,、掃描測量法,、掃描測量精密法,對整個(gè)測試進(jìn)行合適性判斷?聲壓法與聲強(qiáng)法均嚴(yán)格按照GB/T或ISO標(biāo)準(zhǔn)執(zhí)行聲源定位功能特點(diǎn)?基于波束形成技術(shù)的聲陣列分析?快速定位噪聲源?可指定分析頻段,進(jìn)行分析頻段內(nèi)的噪聲源定位?噪聲源定位結(jié)果以云圖方式直觀顯示聲品質(zhì)分析功能特點(diǎn)?對多個(gè),、典型聲品質(zhì)客觀參量進(jìn)行測試,、分析?噪聲評價(jià)分析功能,,可以對噪聲的干擾和危害進(jìn)行評價(jià),,包含多種評價(jià)量和評價(jià)方法
航空發(fā)動(dòng)機(jī)模擬試驗(yàn)臺(tái)泛指對發(fā)動(dòng)機(jī)控制器或控制系統(tǒng)進(jìn)行仿真試驗(yàn)的裝置,其中發(fā)動(dòng)機(jī)作為被控對象,,用計(jì)算機(jī)進(jìn)行模擬,,其余所有部件均為實(shí)際部件。模擬試驗(yàn)臺(tái)在教學(xué)和科研中都發(fā)揮著重要的作用:1.在教學(xué)中,,除了可以使學(xué)生更加直觀的理解發(fā)動(dòng)機(jī)控制系統(tǒng)的構(gòu)成?基本振動(dòng)測量?振動(dòng)傳感器位置的比較好選擇?不對中效應(yīng)研究?軟腳的發(fā)現(xiàn)與校正?軸承失效研究?齒輪失效分析?油液分析&磨粒分析?行星齒輪失效分析?機(jī)械狀態(tài)監(jiān)測實(shí)踐?發(fā)電機(jī)故障分析?低速軸承故障檢測?齒輪齒隙效應(yīng)研究?時(shí)域波形,頻率分析?多級軸對中的實(shí)踐?啟停機(jī)測試?軸承故障時(shí)域頻頻信號分析實(shí)驗(yàn)臺(tái)的故障數(shù)據(jù)可以用于哪些方面?

對試驗(yàn)臺(tái)主要零部件進(jìn)行模態(tài)分析,結(jié)果顯示各部件固有頻率遠(yuǎn)離航空發(fā)動(dòng)機(jī)各階臨界轉(zhuǎn)速,說明了試驗(yàn)臺(tái)初步設(shè)計(jì)的合理性;為提高鼠籠彈性支承剛度設(shè)計(jì)的精確性,提出了有效集算法和遺傳算法相結(jié)合的優(yōu)化方法,優(yōu)化后,2#和3#支點(diǎn)鼠籠彈支的設(shè)計(jì)剛度與目標(biāo)值之間的誤差分別為0.3%和0.1%,驗(yàn)證了該方法的高精度和高效率,。然后,建立雙轉(zhuǎn)子系統(tǒng)動(dòng)力學(xué)簡化模型,運(yùn)用有限單元法推導(dǎo)系統(tǒng)動(dòng)力學(xué)方程,編寫程序計(jì)算了高低壓轉(zhuǎn)子分別為主激勵(lì)時(shí)系統(tǒng)臨界轉(zhuǎn)速,結(jié)果表明計(jì)算值與航空發(fā)動(dòng)機(jī)實(shí)測值的誤差遠(yuǎn)超過了允許誤差5%,需后續(xù)優(yōu)化。接著,運(yùn)用變換哈墨斯利算法優(yōu)化系統(tǒng)的臨界轉(zhuǎn)速,對比優(yōu)化值與航空發(fā)動(dòng)機(jī)實(shí)測值的誤差,其誤差不超過允許誤差5%,低壓轉(zhuǎn)子結(jié)構(gòu)參數(shù)符合設(shè)計(jì)要求,證明了優(yōu)化方法的可行性,。故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)的實(shí)驗(yàn)需要不斷創(chuàng)新,。青海故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)寫論文
增速齒輪箱故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)。振動(dòng)故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)價(jià)格
VALENIAN機(jī)理故障測試臺(tái)主要功能:?齒輪磨損,、齒輪斷齒,、齒輪裂紋、齒輪缺齒的故障模擬仿真問題,;?靜,、動(dòng)不平衡及懸臂轉(zhuǎn)子不平衡,不對中,,松動(dòng),。?軸承故障(外圈、內(nèi)圈,、滾動(dòng)體,、保持架、綜合故障),,不同轉(zhuǎn)速下的振動(dòng)特征頻率識別,;?可以進(jìn)行單面動(dòng)平衡實(shí)驗(yàn),以及敲擊,,啟停機(jī)測試,,還可以支持齒輪偏心、及共振等實(shí)際機(jī)器振動(dòng)測試等,;平臺(tái)支持TCP/IP,、UDP、ModBus,、MQTT,、HTTP、OPC、RS232/RS485等多種接口協(xié)議接入以及強(qiáng)大的WebAPI接口輸出,,兼容Windows,、麒麟等主流操作系統(tǒng)平臺(tái),支持直接調(diào)用軟件平臺(tái)的3D模型,、ODS振型,、頻譜圖、伯德圖等,,為用戶實(shí)現(xiàn)視頻,、GPS/BD、稱重等系統(tǒng)集成以及多平臺(tái)兼容打造良好的生態(tài)條件,。振動(dòng)故障機(jī)理研究模擬實(shí)驗(yàn)臺(tái)價(jià)格
- 紅外激光對中儀器使用方法圖解 2025-06-06
- 三合一激光對中儀器哪家好 2025-06-06
- 法國激光對中儀器批發(fā) 2025-06-06
- 漢吉龍測控激光對中儀器連接 2025-06-06
- 激光對中儀器 2025-06-06
- 自主研發(fā)激光對中儀器找正方法 2025-06-06
- 振動(dòng)激光對中儀器校準(zhǔn)規(guī)范 2025-06-06
- 電機(jī)激光對中儀器怎么做 2025-06-06
- 多功能激光對中儀器裝置 2025-06-06
- 常見激光對中儀器多少錢 2025-06-06
- 江西循環(huán)水壓力變送器產(chǎn)品介紹 2025-06-06
- 溫州美標(biāo)彎頭咨詢 2025-06-06
- 蘇州固定滑槽傾角計(jì)廠家直銷 2025-06-06
- 光譜儀廠家電話 2025-06-06
- 黔西南在線安全閥校檢機(jī)構(gòu) 2025-06-06
- 北京穩(wěn)定性高纖維直徑檢測設(shè)備哪里有 2025-06-06
- 湖北小型激光測距傳感器 2025-06-06
- 上海放心選稱重模塊系統(tǒng) 2025-06-06
- 新型纖維直徑檢測設(shè)備案例 2025-06-06
- 溫州不銹鋼管支架ISO標(biāo)準(zhǔn) 2025-06-06