-
借力浙江 “雙碳” 新政 晶映照明節(jié)能改造推動(dòng)企業(yè)綠色轉(zhuǎn)型
-
山東“五段式”電價(jià)來襲,!晶映節(jié)能燈,省電90%的秘密武器,!
-
晶映照明助力重慶渝北區(qū)冉家壩小區(qū)車庫煥新顏
-
停車場(chǎng)改造的隱藏痛點(diǎn):從 “全亮模式” 到晶映T8的智能升級(jí)
-
晶映T8:重新定義停車場(chǎng)節(jié)能改造新標(biāo)準(zhǔn)
-
杭州六小龍后,,晶映遙遙 “領(lǐng)銜” 公共區(qū)域節(jié)能照明
-
晶映節(jié)能照明:推進(jìn)公共區(qū)域節(jié)能照明革新之路
-
晶映:2025年停車場(chǎng)照明節(jié)能改造新趨勢(shì)
-
晶映助力商業(yè)照明 企業(yè)降本增效新引擎
-
晶映節(jié)能賦能重慶解放碑:地下停車場(chǎng)照明革新,測(cè)電先行
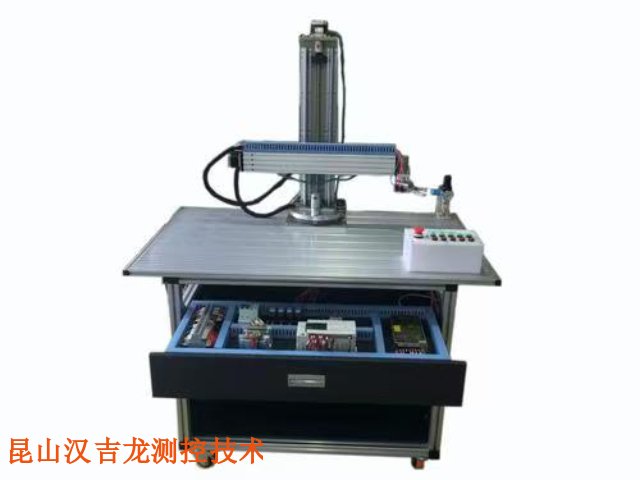
進(jìn)口機(jī)械手實(shí)訓(xùn)裝置產(chǎn)線
,、機(jī)械手實(shí)驗(yàn)裝置由底座,、旋轉(zhuǎn)底座、氣動(dòng)部分,、三維(X,、Y、Z)運(yùn)動(dòng)機(jī)械及電氣控制等四部分組成,。氣動(dòng)部分由電磁閥和氣缸組成,。三維運(yùn)動(dòng)機(jī)械部分是一個(gè)采用滾珠絲杠傳動(dòng)的齒輪傳動(dòng)相結(jié)合的模塊化結(jié)構(gòu),用于實(shí)現(xiàn)定位功能。2,、電氣控制由三菱可編程控制器(PLC自備),,步進(jìn)電機(jī)驅(qū)動(dòng)器、電源,、傳感器等組成,。3、通過傳感器信號(hào)采集,,PLC編程,,實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)、直流電機(jī),、電磁閥進(jìn)行較復(fù)雜的位置控制,、時(shí)序邏輯控制及開關(guān)控制等功能。4,、能完成PLC主機(jī)網(wǎng)絡(luò)及MCGS工控組態(tài)棒圖動(dòng)態(tài)跟蹤實(shí)驗(yàn)教學(xué),。二、通過編程,,可實(shí)現(xiàn)如下實(shí)驗(yàn)功能開機(jī)復(fù)位,、橫軸前伸/縮回、豎軸上升/下降,、底盤旋轉(zhuǎn),、手旋轉(zhuǎn)、手張開/夾緊,,通過編程,,使上述功能按一定順序排列即可完成將一定范圍內(nèi)的物品轉(zhuǎn)運(yùn)到指定位置。小車運(yùn)動(dòng)控制系統(tǒng)實(shí)訓(xùn)教學(xué)模型機(jī)械手實(shí)訓(xùn)裝置有教學(xué)臺(tái)嗎,?進(jìn)口機(jī)械手實(shí)訓(xùn)裝置產(chǎn)線
裝載機(jī)液壓系統(tǒng)與PLC控制實(shí)訓(xùn)裝置一,、概述裝載機(jī)是機(jī)械工程中主要的機(jī)械,它廣泛應(yīng)用于工程建筑,、施工筑路,、水力工程、**工程等土石方施工及礦山采掘等行業(yè),。液壓裝載機(jī)仿真模型具有體積小,、重量輕、操作方便和遠(yuǎn)距離操縱等優(yōu)點(diǎn),,其目的是引導(dǎo)學(xué)生進(jìn)行積極思維,、創(chuàng)新設(shè)計(jì)、培養(yǎng)學(xué)生綜合設(shè)計(jì)能力和實(shí)踐動(dòng)手能力,,裝載機(jī)是機(jī)械工程中主要的機(jī)械,,它廣泛應(yīng)用于工程建筑,、施工筑路、水力工程,、**工程等土石方施工及礦山采掘等行業(yè),。液壓裝載機(jī)仿真模型具有體積小、重量輕,、操作方便和遠(yuǎn)距離撰縱等優(yōu)點(diǎn),,其目的是引導(dǎo)學(xué)生進(jìn)行積極思維、創(chuàng)新設(shè)計(jì),、培養(yǎng)學(xué)生綜合設(shè)計(jì)能力和實(shí)踐動(dòng)手能力一種新型綜合實(shí)訓(xùn)設(shè)備,。自動(dòng)化機(jī)械手實(shí)訓(xùn)裝置用途你會(huì)操作這機(jī)械手實(shí)訓(xùn)裝置嗎?
裝置構(gòu)成與定制特性機(jī)電液氣一體化綜合實(shí)訓(xùn)考核裝置,,作為機(jī)電專業(yè)的教學(xué)利器,,其工作臺(tái)架采用鋁合金型材結(jié)構(gòu),具備高度的靈活性和定制性,。該裝置集成了上料,、傳送、沖壓,、鉆孔及分揀等多個(gè)單元,,同時(shí)配備PLC主機(jī)、變頻器,、傳感器等多種電氣液壓氣動(dòng)部件,,為學(xué)生提供了***的實(shí)踐學(xué)習(xí)平臺(tái)。根據(jù)客戶需求,,裝置可進(jìn)行非標(biāo)定制,,以更好地滿足教學(xué)需求。關(guān)鍵參數(shù)與性能特點(diǎn)該裝置的工作電源為三相五線~380V±10%,,確保穩(wěn)定運(yùn)行。其外形尺寸為1400mmx960mmx750mm,,便于在實(shí)訓(xùn)室內(nèi)靈活布局,。微型液壓動(dòng)力源與靜音空氣壓縮機(jī)的參數(shù)配置,確保了裝置在高壓,、高速運(yùn)行時(shí)的穩(wěn)定性和安全性,。
工作站結(jié)構(gòu)認(rèn)知 關(guān)鍵設(shè)備的特性和參數(shù)設(shè)置 工業(yè)機(jī)器人及周邊設(shè)備的維護(hù)及典型錯(cuò)誤排查 工業(yè)機(jī)器人手動(dòng)控制及基本參數(shù)設(shè)置 工業(yè)機(jī)器人IO通信及PLC信息交互 工業(yè)機(jī)器人單軸運(yùn)動(dòng)與線性運(yùn)動(dòng)控制 工業(yè)機(jī)器人工具TCP參數(shù)標(biāo)定 工業(yè)機(jī)器人工件坐標(biāo)系參數(shù)標(biāo)定及多坐標(biāo)系切換 基于關(guān)鍵點(diǎn)的軌跡編程(精確定位/圓弧逼近) 基于樣條曲線的軌跡編程 條件判斷語句的用法及編程 循環(huán)語句的用法及編程 子程序的編程及調(diào)用 模擬碼垛工藝應(yīng)用編程 模擬上下料工藝應(yīng)用編程 工業(yè)機(jī)器人與PLC的通訊與聯(lián)調(diào) 基于Prt工業(yè)機(jī)器人離線編程軟件的工作站模型環(huán)境搭建與配置 基于Prt工業(yè)機(jī)器人離線編程軟件的簡(jiǎn)單平面軌跡離線編程應(yīng)用 基于Prt工業(yè)機(jī)器人離線編程軟件的模擬搬運(yùn)碼垛離線編程應(yīng)用 基于P工業(yè)機(jī)器人離線編程軟件的模擬上下料離線編程應(yīng)用 基于Pt工業(yè)機(jī)器人離線編程軟件的寫字繪圖離線編程應(yīng)用利用它能提升對(duì)工業(yè)自動(dòng)化系統(tǒng)的理解嗎?

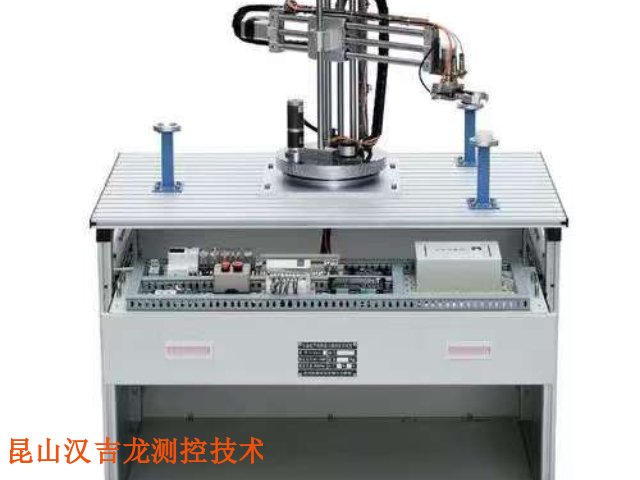
該裝置的工作電源為三相五線~380V±10%,,確保穩(wěn)定運(yùn)行,。其外形尺寸為1400mmx960mmx750mm,便于在實(shí)訓(xùn)室內(nèi)靈活布局,。微型液壓動(dòng)力源與靜音空氣壓縮機(jī)的參數(shù)配置,,確保了裝置在高壓,、高速運(yùn)行時(shí)的穩(wěn)定性和安全性。部件組成與功能解析1.實(shí)訓(xùn)工作臺(tái):采用工業(yè)鋁合金型材,,便于安裝和拆卸各種自動(dòng)化機(jī)構(gòu)和電氣,、液壓、氣動(dòng)部件,。大吊柜設(shè)計(jì),,方便存放資料和工具2.上料單元:通過光電傳感器、氣缸等部件,,實(shí)現(xiàn)工件的自動(dòng)上料和定位,,提高生產(chǎn)效率。3.傳送及夾緊單元:采用氣缸,、導(dǎo)軌等部件,,實(shí)現(xiàn)工件的間歌式傳送和定位夾緊,確保加工精度,4.沖壓?jiǎn)卧?利用液壓泵站,、液壓缸等部件,,模擬工件的沖壓加工過程,使學(xué)生了解沖壓工藝的基本原理,5.鉆孔單元:通過直流電機(jī),、鉆床,、液壓缸等部件,完成工件的鉆孔加工模擬,,培養(yǎng)學(xué)生實(shí)際操作能力,6.分揀單元:利用交流減速電機(jī),、傳送帶、氣缸等部件,,實(shí)現(xiàn)工件的分揀和分類存儲(chǔ),,提高生產(chǎn)效率。在機(jī)械手實(shí)訓(xùn)裝置上能模擬真實(shí)工業(yè)場(chǎng)景操作嗎,?進(jìn)口機(jī)械手實(shí)訓(xùn)裝置產(chǎn)線
利用它能提升對(duì)機(jī)械設(shè)計(jì)軟件的運(yùn)用能力嗎,?進(jìn)口機(jī)械手實(shí)訓(xùn)裝置產(chǎn)線
搬運(yùn)里元1、氣動(dòng)組件的應(yīng)用與裝調(diào)2,、霍爾磁性開關(guān)的裝調(diào)3,、三軸運(yùn)動(dòng)機(jī)械手控制4、機(jī)械手單周期運(yùn)動(dòng)控制5,、機(jī)械手連續(xù)運(yùn)動(dòng)控制6,、機(jī)械手步進(jìn)運(yùn)動(dòng)控制7、機(jī)械手手動(dòng)/自動(dòng)控制8,、機(jī)械手錄制控制分揀單元1,、氣動(dòng)組件的應(yīng)用與裝調(diào)2、變頻器基本參數(shù)設(shè)置實(shí)訓(xùn)3,、變頻器PU操作實(shí)訓(xùn)變頻器外部控制實(shí)訓(xùn)4.5,、變頻器點(diǎn)動(dòng)調(diào)試實(shí)訓(xùn)6,、變頻器無極調(diào)速實(shí)訓(xùn)7、變頻器多段速度控制實(shí)訓(xùn)8,、變頻器自定義端子實(shí)訓(xùn)9,、反射性傳感器的應(yīng)用10、材質(zhì)傳感器的應(yīng)用11,、霍爾傳感器的應(yīng)用12,、電機(jī)控制傳送帶運(yùn)行實(shí)訓(xùn)13、步進(jìn)系統(tǒng)控制傳送帶運(yùn)行實(shí)訓(xùn)14,、分類記錄管理進(jìn)口機(jī)械手實(shí)訓(xùn)裝置產(chǎn)線
- HOJOLO激光對(duì)中儀工作原理 2025-05-10
- 內(nèi)蒙古轉(zhuǎn)子機(jī)械故障綜合模擬實(shí)驗(yàn)臺(tái) 2025-05-10
- 湖北教學(xué)實(shí)驗(yàn)臺(tái)服務(wù) 2025-05-10
- 重慶轉(zhuǎn)子動(dòng)力學(xué)機(jī)械故障綜合模擬實(shí)驗(yàn)臺(tái) 2025-05-10
- LEAKSHOOTER疏水閥檢測(cè)儀意義 2025-05-10
- 寧夏DDS機(jī)械故障綜合模擬實(shí)驗(yàn)臺(tái) 2025-05-10
- 動(dòng)力傳動(dòng)故障模擬實(shí)驗(yàn)臺(tái)定制 2025-05-10
- 大型機(jī)械故障綜合模擬實(shí)驗(yàn)臺(tái)哪家好 2025-05-10
- 進(jìn)口教學(xué)實(shí)驗(yàn)臺(tái)使用 2025-05-10
- 常見機(jī)械故障綜合模擬實(shí)驗(yàn)臺(tái)原理 2025-05-10
- 蘇州鏡頭光學(xué)設(shè)計(jì)要求 2025-05-10
- 奧林巴斯手持式合金考古分析光譜儀 2025-05-10
- 上海振弦式鋼筋應(yīng)變計(jì)直銷 2025-05-10
- 安徽拉力機(jī)哪里有賣的 2025-05-10
- 湖北那種預(yù)約密碼水控機(jī) 2025-05-10
- 河南蝶閥型號(hào) 2025-05-10
- 陜西多層次自力式品牌生產(chǎn)廠家 2025-05-10
- 重慶塵埃粒子檢測(cè)系統(tǒng) 2025-05-10
- 鹽水濁度分析儀表 2025-05-10
- 江蘇塑料瓶廠家 2025-05-10