湖北光伏清掃機器人報價
國自機器人獲評首臺(套)項目一覽,,2014年變電站KYN開關柜智能操控機器人;2015年基于多驅動單元同步控制的重載搬運機器人,;2016年面向太陽能光熱發(fā)電場的鏡面清洗機器人;2017年基于測量式激光導航的叉式搬運機器人物流系統(tǒng),;2020年SUNBOT子母式跨陣列作業(yè)光伏清潔機器人碳中和,;碳中和:指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,就是碳中和或凈零二氧化碳排放,。根據(jù)不同的光伏電站特性,,配置相應的機器人組合,靈活高效的實現(xiàn)光伏電站的無人化清潔!衛(wèi)生安全方面,,機器人的運行不需要人工干預,,避免了人工清潔過程中可能產生的傷害和污染風險。湖北光伏清掃機器人報價

國自機器人獲評首臺(套)項目一覽:2014,,變電站KYN開關柜智能操控機器人 2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發(fā)電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統(tǒng)2020:SUNBOT子母式跨陣列作業(yè)光伏清潔機器人碳中和:碳中和是指一個組織在一年內的二氧化碳(CO2)排放通過二氧化碳去除技術應用達到平衡,,就是碳中和或凈零二氧化碳排放。根據(jù)不同的光伏電站特性,,配置相應的機器人組合,,靈活高效的實現(xiàn)光伏電站的無人化清潔!山西智能清洗機器人多少錢智能算法的運用使它能規(guī)劃清掃路線,提高清掃的效率,。

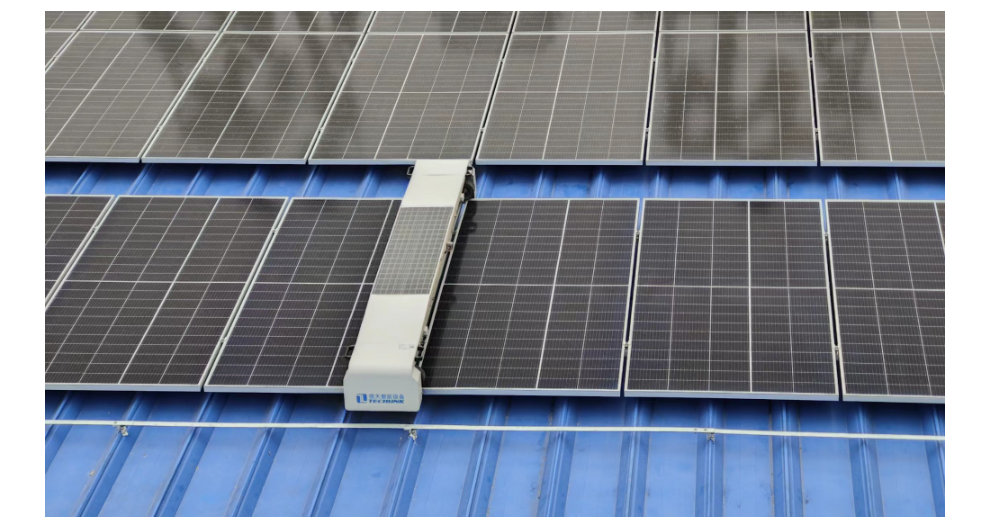
輥刷拼接設計,,易于組裝和維護。自適應傾斜行走驅動裝置可輕松應對光伏組件陣列從上到下,、從左到右,、從前到后的變化,;光伏組件的框架用作軌道,無需鋪設軌道,,成本低,,便于現(xiàn)場安裝和施工。自適應跟蹤裝置**提高了光伏組件陣列橋接的施工效率,,**縮短了施工周期,;電控系統(tǒng)抗干擾能力強,耐高低溫,,可靠性和穩(wěn)定性好,;**控制實現(xiàn)所有清潔機器人的智能調度;這是目前理想的光伏組件清潔方案,;機器人清潔效率是人工清潔的3-5倍,、成本低(*為手動清潔成本的30%-50%)等諸多優(yōu)點。
光伏組件自動除塵一般根據(jù)季節(jié)和地區(qū)而定,,有些地區(qū)空氣質量不好,,容易積灰,,就要每個月進行清理一次,,有些地方好一些,可以2個月清理一次,。另外,,光伏板本身安裝的時候具有一定的傾斜度,有一定的自清潔能力的,。清理過程主要有三個步驟:1,、先用軟布或雞毛撣子清理組件表面浮塵,2,、而后用水小心清洗組件表面,,3、***用軟布把表面的浮水吸干,。一是要注意光伏電站的除塵時機除塵的時候,,應盡量避開光伏電站比較好工作時間,在高溫和強烈光照下,,光伏電站有高電壓,、大電流,稍有不慎會給清掃人員帶來電擊傷害以及可能對組件的破壞,,建議選擇清晨,、傍晚的時候進行組件清潔工作,因為這段時間光伏電站工作效率低,、發(fā)電量小,,減小清掃的風險,。
能夠實時監(jiān)測電池板的清潔狀態(tài),并通過云平臺進行數(shù)據(jù)分析,為電站管理提供科學依據(jù),。
做好光伏板清掃機器人發(fā)展前景預測,,需把握預測的四個基本要素:1、信息,。信息是客觀事物特性和變化的表征和反映,,存在于各類載體,是光伏板清掃機器人預測的主要工作對象,、工作基礎和成果反映,。2、方法,。方法是指在預測的過程中進行質和量的分析時所采用的各種手段,。預測的方法按照不同的標準可以分成不同的類別。按照光伏板清掃機器人預測結果屬性可以分為定性預測和定量預測,,按照預測時間長短的不同,,可以分為長期預測、中期預測和短期預測,。按照方法本身,,更可以分成眾多的類別,**基本的是模型預測和非模型預測,。
大部分電站環(huán)境惡劣,,缺水,取水困難.這個機器人不需要用水,。河北光伏掃地機器人報價
大部分電站環(huán)境惡劣,缺水,取水困難,,這個機器人不需要用水。湖北光伏清掃機器人報價
普通廢鋼與廢不銹鋼的區(qū)別:1.從韌性和硬度上區(qū)別:普通廢鋼軟而有韌性,,易彎不易斷;2.鉻不銹廢鋼性堅硬,,砸擊能彎不能斷;3.鎳鉻不銹廢鋼隨著全球能源體系加快向低碳化轉型,光伏產業(yè)發(fā)展迅速,。而“灰塵”是光伏產業(yè)的**產品—光伏電池板的一大***,。灰塵污染不僅會大幅降低發(fā)電量,,甚至還會燒毀光伏組件,。因此,如何快速,、有效清潔光伏電池板一直是行業(yè)面臨的難題;隨著西安美暢產業(yè)園等的落地,,航天基地光伏產業(yè)將在**企業(yè)的**下,進一步強鏈補鏈延鏈,成為推動區(qū)域高質量發(fā)展的強大動能!湖北光伏清掃機器人報價
- 青海光伏清掃機器人報價 2025-06-14
- 湖北光伏智能清掃機器人報價表 2025-06-14
- 浙江智能清掃機器人廠家價格 2025-06-14
- 西藏智能清洗機器人廠家 2025-06-14
- 黑龍江運維機器人報價 2025-06-14
- 河南運維機器人價格 2025-06-14
- 陜西光伏智能清掃機器人生產廠家 2025-06-14
- 河南光伏運維機器人費用 2025-06-14
- 廣東電站清掃機器人 2025-06-14
- 江西光伏智能清洗機器人哪家好 2025-06-14
- 陜西小型刺梨加工生產線哪里有 2025-06-14
- 山東煤氣熱值分析儀多少錢 2025-06-14
- 東城區(qū)供應TOKYODIAMOND性價比高 2025-06-14
- 常州硬質合金冷沖模具哪家好 2025-06-14
- 淮安數(shù)字打刻機批發(fā)零售 2025-06-14
- 常州出口288雙針床經編機哪家好 2025-06-14
- 貴州CCC球座批發(fā) 2025-06-14
- 吳江精密慢走絲設備選哪家 2025-06-14
- 瀏陽PET注塑機采購 2025-06-14
- 四川亞德客型氣缸定制 2025-06-14