-
臺(tái)達(dá)ME300變頻器:小身材,大能量,,開(kāi)啟工業(yè)調(diào)速新篇章
-
臺(tái)達(dá)MH300變頻器:傳動(dòng)與張力控制的革新利器-友誠(chéng)創(chuàng)
-
磁浮軸承驅(qū)動(dòng)器AMBD:高速變頻技術(shù)引導(dǎo)工業(yè)高效能新時(shí)代
-
臺(tái)達(dá)液冷型變頻器C2000-R:工業(yè)散熱與空間難題
-
臺(tái)達(dá)高防護(hù)型MS300 IP66/NEMA 4X變頻器
-
重載設(shè)備救星,!臺(tái)達(dá)CH2000變頻器憑高過(guò)載能力破局工業(yè)難題
-
臺(tái)達(dá)C2000+系列變頻器:工業(yè)驅(qū)動(dòng)的優(yōu)越之選!
-
臺(tái)達(dá)CP2000系列變頻器:工業(yè)驅(qū)動(dòng)的革新力量,!
-
臺(tái)達(dá)變頻器MS300系列:工業(yè)節(jié)能與智能控制的全能之選。
-
一文讀懂臺(tái)達(dá) PLC 各系列!性能優(yōu)越,,優(yōu)勢(shì)盡顯
安徽二維碼導(dǎo)航AGV怎么樣
該導(dǎo)航方式依然是通過(guò)磁導(dǎo)航傳感器檢測(cè)磁釘?shù)拇判盘?hào)來(lái)尋找行進(jìn)路徑,只是將原來(lái)采用磁條導(dǎo)航時(shí)對(duì)磁條進(jìn)行連續(xù)感應(yīng)變成間歇性感應(yīng),,因此磁釘之間的距離不能夠過(guò)大,,且兩磁釘間AGV處于一種距離計(jì)量的狀態(tài),在該狀態(tài)下需要編碼器計(jì)量所行走的距離,。其次,,磁釘導(dǎo)航所用控制模塊與磁條導(dǎo)航控制模塊相同。磁釘導(dǎo)航的優(yōu)點(diǎn):成本低,、技術(shù)成熟可靠,。導(dǎo)航的隱秘性好、美觀性強(qiáng),,也就是說(shuō)磁釘預(yù)埋打孔填埋在地面下,,整個(gè)工廠地面以上沒(méi)有其他導(dǎo)航輔助設(shè)備。磁釘抗干擾強(qiáng),,抗磨損性強(qiáng),,抗酸堿、油污等影響,。使用用戶外,、室內(nèi)、下雨等等,。磁釘導(dǎo)航的缺點(diǎn):AGV導(dǎo)航地面需滿足技術(shù)要求,,即AGV導(dǎo)航路線內(nèi)不能有其他磁性物質(zhì)存在,;AGV導(dǎo)航線路不能有消磁、抗磁物質(zhì),,影響AGV磁釘磁性,。AGV磁釘導(dǎo)航線路一次鋪設(shè),后續(xù)修改線路必須執(zhí)行二次作業(yè),,對(duì)比激光導(dǎo)航技術(shù),,磁釘導(dǎo)航對(duì)于后期修改線路增加成本和施工時(shí)間。AGV磁釘導(dǎo)航施工會(huì)對(duì)地面進(jìn)行一定的破壞功能,,即在地面開(kāi)孔,,然后回填,對(duì)施工技術(shù)要求嚴(yán)格,,才能恢復(fù)原地面美觀要求,。AGV智能調(diào)度,優(yōu)化工作流程,。安徽二維碼導(dǎo)航AGV怎么樣
光學(xué)導(dǎo)航是在AGV的行駛路徑上涂漆或粘貼色帶,,通過(guò)對(duì)攝像機(jī)采入的色帶圖像信號(hào)進(jìn)行簡(jiǎn)單處理而實(shí)現(xiàn)自動(dòng)導(dǎo)引。該導(dǎo)航方式分為色帶跟蹤導(dǎo)航,、二維碼識(shí)別等功能,。光學(xué)導(dǎo)航技術(shù)成熟,應(yīng)用也較為***,。目前,,亞馬遜應(yīng)用的KIVA機(jī)器人就是利用光學(xué)導(dǎo)航實(shí)現(xiàn)的。該導(dǎo)航方式靈活性比較好,,地面路線設(shè)置簡(jiǎn)單易行,,但對(duì)色帶的污染和機(jī)械磨損十分敏感,對(duì)環(huán)境要求過(guò)高,,導(dǎo)引可靠性較差,,精度較低。激光導(dǎo)航是在AGV行駛路徑的周圍安裝位置精確的激光反射板,,AGV通過(guò)激光掃描器發(fā)射激光束,,同時(shí)采集由反射板反射的激光束,來(lái)確定其當(dāng)前的位置和航向,,并通過(guò)連續(xù)的三角幾何運(yùn)算來(lái)實(shí)現(xiàn)AGV的導(dǎo)引,。此項(xiàng)技術(shù)比較大的優(yōu)點(diǎn)是,AGV定位精確,,地面無(wú)需其他定位設(shè)施,,行駛路徑可靈活多變,能夠適合多種現(xiàn)場(chǎng)環(huán)境。缺點(diǎn)是制造成本高,,對(duì)環(huán)境要求比較苛刻(外界光線、地面要求,、能見(jiàn)度要求等),,不適合室外(尤其是易受雨、雪,、霧的影響)應(yīng)用,。徐匯區(qū)商用AGV高效AGV,助力企業(yè)快速發(fā)展,。

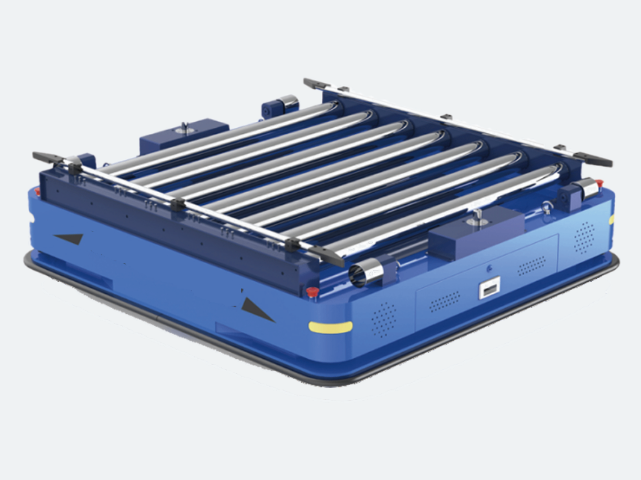
AGV(自動(dòng)導(dǎo)引車)是一種自動(dòng)化物流設(shè)備,,廣泛應(yīng)用于工業(yè)生產(chǎn)和倉(cāng)儲(chǔ)領(lǐng)域。它是一種能夠自主行駛,、無(wú)需人工操控的電動(dòng)車輛,,通過(guò)激光導(dǎo)航、視覺(jué)識(shí)別或磁導(dǎo)航等技術(shù),,能夠準(zhǔn)確地識(shí)別環(huán)境并規(guī)劃比較好路徑,。AGV具有多種功能和應(yīng)用場(chǎng)景。首先,,它可以用于物料搬運(yùn),。在工廠生產(chǎn)線上,AGV能夠根據(jù)預(yù)設(shè)的路徑和任務(wù),,自動(dòng)將原材料,、半成品或成品從一個(gè)地點(diǎn)運(yùn)輸?shù)搅硪粋€(gè)地點(diǎn),實(shí)現(xiàn)自動(dòng)化的物流運(yùn)輸,,提高生產(chǎn)效率和減少人力成本,。其次,AGV還可以用于倉(cāng)儲(chǔ)管理,。
磁條導(dǎo)航被認(rèn)為是一項(xiàng)非常成熟的技術(shù),,主要通過(guò)測(cè)量路徑上的磁場(chǎng)信號(hào)來(lái)獲取車輛自身相對(duì)于目標(biāo)跟蹤路徑之間的位置偏差,從而實(shí)現(xiàn)車輛的控制及導(dǎo)航,。磁條導(dǎo)航具有很高的測(cè)量精度及良好的重復(fù)性,,磁導(dǎo)航不易受光線變化等的影響,在運(yùn)行過(guò)程中,,磁傳感系統(tǒng)具有很高的可靠性和魯棒性,。磁條一旦鋪設(shè)好后,維護(hù)費(fèi)用非常低,,使用壽命長(zhǎng),,且增設(shè)、變更路徑較容易。磁條導(dǎo)航的優(yōu)點(diǎn):現(xiàn)場(chǎng)施工簡(jiǎn)單,。成本低,、技術(shù)成熟可靠。對(duì)于聲光無(wú)干擾性,。AGV運(yùn)行線路明顯性,。線路二次變更容易、變更成本低,、變更周期短,。對(duì)施工人員技術(shù)要求低磁條導(dǎo)航的缺點(diǎn):磁條易破損;由于地面鋪設(shè)磁條,,整體美觀性下降,。磁條不能連貫性,由于AGV轉(zhuǎn)彎會(huì)碾壓磁條,,部分磁條會(huì)截?cái)嗖讳佋O(shè),。磁條會(huì)吸引金屬物質(zhì),導(dǎo)致AGV設(shè)備故障等等,。需要其他傳感器實(shí)現(xiàn)定位站點(diǎn)功能,。智能AGV,讓搬運(yùn)更輕松,。
當(dāng)前,,復(fù)合導(dǎo)航是AGV導(dǎo)航的主要?jiǎng)?chuàng)新方向,其中慣性+視覺(jué)導(dǎo)航**為主流,。該組合導(dǎo)航技術(shù)通過(guò)CCD傳感器感知環(huán)境,,由計(jì)算機(jī)對(duì)圖像進(jìn)行處理分析,獲取載體的位置和姿態(tài)等導(dǎo)航信息,,進(jìn)而修正慣性誤差,。一方面,視覺(jué)導(dǎo)航為慣性導(dǎo)航提供誤差補(bǔ)償信息,,彌補(bǔ)了慣性誤差隨時(shí)間漂移的不足,;另一方面,慣性導(dǎo)航憑借系統(tǒng)數(shù)據(jù)更新率高,、不受光照等環(huán)境影響,、短時(shí)定位精度高的優(yōu)勢(shì),彌補(bǔ)了視覺(jué)導(dǎo)航處理實(shí)時(shí)性不足的缺陷,。如??禉C(jī)器人公司自主研發(fā)的阡陌倉(cāng)儲(chǔ)機(jī)器人,采用二維碼視覺(jué)導(dǎo)航+慣性導(dǎo)航雙導(dǎo)航技術(shù),,實(shí)現(xiàn)自主定位,,定位精度誤差小于5mm,,穩(wěn)定高效,可智能協(xié)調(diào)作業(yè),,大幅提升運(yùn)維及管理效率,。歐鎧公司***研制的小精靈機(jī)器人是一款專門針對(duì)工廠內(nèi)簡(jiǎn)單輕型的物料搬運(yùn)的產(chǎn)品。它采用慣性+二維碼視覺(jué)導(dǎo)航,,不僅小巧靈活,,而且精度高、速度快,,集自動(dòng)躲避障礙物,、自由規(guī)劃路線,、姿態(tài)保持等強(qiáng)大功能于一身,,**提高倉(cāng)庫(kù)作業(yè)效率。AGV智能調(diào)度,,讓管理更輕松,。江蘇重載AGV種類
靈活A(yù)GV,輕松應(yīng)對(duì)復(fù)雜環(huán)境,。安徽二維碼導(dǎo)航AGV怎么樣
主要涉及三大技術(shù)要點(diǎn):1.定位定位是確定AGV在工作環(huán)境中相對(duì)于全局坐標(biāo)的位置及航向,,是AGV導(dǎo)航導(dǎo)引的**基本環(huán)節(jié)。2.環(huán)境感知與建模為了實(shí)現(xiàn)AGV自主移動(dòng),,需要根據(jù)多種傳感器識(shí)別多種環(huán)境信息:如道路邊界,、地面情況、障礙物等,。AGV通過(guò)環(huán)境感知確定前進(jìn)方向中的可達(dá)區(qū)域和不可達(dá)區(qū)域,,確定在環(huán)境中的相對(duì)位置,以及對(duì)動(dòng)態(tài)障礙物運(yùn)動(dòng)進(jìn)行預(yù)判,,從而為局部路徑規(guī)劃提供依據(jù),。3.路徑規(guī)劃根據(jù)AGV掌握環(huán)境信息的程度不同,可分為兩種類型:一個(gè)是基于環(huán)境信息已知的全局路徑規(guī)劃,,另一個(gè)是基于傳感器信息的局部路徑規(guī)劃,,后者環(huán)境是未知或部分未知的,即障礙物的尺寸,、形狀和位置等信息必須通過(guò)傳感器獲取,。安徽二維碼導(dǎo)航AGV怎么樣
- 鹽城平行背視覺(jué)光源種類 2025-05-04
- 吉林視覺(jué)光源價(jià)格 2025-05-04
- 河南AGV生產(chǎn)廠家 2025-05-04
- 鎮(zhèn)江高亮線視覺(jué)光源優(yōu)勢(shì) 2025-05-04
- 廣州新能源視覺(jué)光源維修 2025-05-04
- 無(wú)錫側(cè)面背視覺(jué)光源一般多少錢 2025-05-04
- 安徽食品飲料AGV哪個(gè)好 2025-05-04
- 天津郵政快遞分揀AGV價(jià)格表 2025-05-04
- 無(wú)錫遠(yuǎn)心視覺(jué)光源商家 2025-05-04
- 南京物流倉(cāng)儲(chǔ)AGV價(jià)格表 2025-05-04
- 遼寧管閥酸洗鈍化設(shè)備訂做價(jià)格 2025-05-04
- 重慶綠色環(huán)保的全自動(dòng)鋼筋桁架焊接生產(chǎn)線好不好用 2025-05-04
- 湖南燃?xì)馊紵龣C(jī)廠家 2025-05-04
- 江西磷化酸洗鈍化設(shè)備方案 2025-05-04
- 咸寧公共空間設(shè)計(jì)類型有哪些 2025-05-04
- 貴州控溫膠帶硫化機(jī)定制 2025-05-04
- 珠海燃?xì)庑蜏乜卦O(shè)備廠家 2025-05-04
- 湖北中開(kāi)離心泵 2025-05-04
- 貴州耐磨螺旋輸送機(jī) 2025-05-04
- 上海銑削電主軸經(jīng)銷商 2025-05-04