安徽美國關(guān)節(jié)臂服務(wù)電話
在汽車制造行業(yè),關(guān)節(jié)臂貫穿于零部件生產(chǎn)和整車裝配的全過程,。在零部件制造環(huán)節(jié),,發(fā)動機(jī)缸體、曲軸,、變速箱齒輪等關(guān)鍵零部件的精度直接影響汽車的性能和可靠性,。利用關(guān)節(jié)臂對這些零部件的尺寸精度、形狀誤差進(jìn)行精確測量,,能夠?qū)崟r監(jiān)測生產(chǎn)過程中的尺寸偏差,,及時調(diào)整加工工藝參數(shù),提高產(chǎn)品合格率,。例如,,在某汽車發(fā)動機(jī)生產(chǎn)企業(yè),采用關(guān)節(jié)臂對發(fā)動機(jī)缸體的缸筒內(nèi)徑,、活塞銷孔位置等關(guān)鍵尺寸進(jìn)行測量,,將加工精度控制在微米級,有效提升了發(fā)動機(jī)的動力性能和燃油經(jīng)濟(jì)性,。在整車裝配環(huán)節(jié),,關(guān)節(jié)臂可用于檢測車身的裝配精度。對車門,、發(fā)動機(jī)罩,、行李箱蓋等部件的安裝位置和間隙進(jìn)行測量和調(diào)整,確保整車的外觀質(zhì)量和裝配性能,。三坐標(biāo)關(guān)節(jié)臂的精度和重復(fù)性誤差極低,,滿足高精度測量要求。安徽美國關(guān)節(jié)臂服務(wù)電話

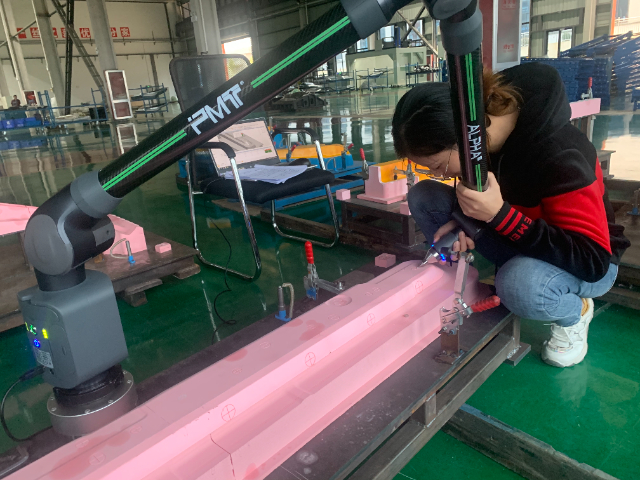
關(guān)節(jié)臂測量技術(shù):精細(xì)測量的革新力量關(guān)節(jié)臂測量技術(shù)作為現(xiàn)代工業(yè)測量與檢測領(lǐng)域的一項(xiàng)重要技術(shù),,以其高精度,、高靈活性和廣泛的應(yīng)用范圍,成為制造業(yè),、航空航天,、汽車、模具制造等多個行業(yè)不可或缺的工具,。關(guān)節(jié)臂測量技術(shù)概述關(guān)節(jié)臂測量技術(shù)是一種基于多關(guān)節(jié)機(jī)械臂結(jié)構(gòu)的測量系統(tǒng),,通過模擬人體手臂的運(yùn)動方式,實(shí)現(xiàn)空間內(nèi)任意位置的精確測量。該技術(shù)結(jié)合了精密機(jī)械,、電子傳感,、計(jì)算機(jī)控制及數(shù)據(jù)處理等多學(xué)科技術(shù),能夠?qū)崟r捕捉被測物體的三維坐標(biāo)信息,,為后續(xù)的加工,、裝配、質(zhì)量檢測等環(huán)節(jié)提供準(zhǔn)確的數(shù)據(jù)支持,。關(guān)節(jié)臂測量系統(tǒng)通常由測量臂,、測量探頭、控制系統(tǒng),、數(shù)據(jù)處理軟件等部分組成,。測量臂采用多關(guān)節(jié)串聯(lián)結(jié)構(gòu),每個關(guān)節(jié)內(nèi)置高精度傳感器,,能夠感知關(guān)節(jié)的旋轉(zhuǎn)角度和位移變化,。測量探頭則用于直接接觸被測物體表面,獲取其形狀,、尺寸等信息,。控制系統(tǒng)負(fù)責(zé)協(xié)調(diào)各關(guān)節(jié)的運(yùn)動,,確保測量過程的穩(wěn)定性和準(zhǔn)確性,。數(shù)據(jù)處理軟件則對采集到的數(shù)據(jù)進(jìn)行處理和分析,生成測量報告和三維模型等結(jié)果,。南京怎樣選擇關(guān)節(jié)臂哪里有使用三坐標(biāo)關(guān)節(jié)臂進(jìn)行測量時,,操作人員可以實(shí)時查看測量數(shù)據(jù)和三維模型對比。
智能控制算法賦予了關(guān)節(jié)臂更高的智能化水平,。通過運(yùn)用先進(jìn)的控制算法,,控制系統(tǒng)能夠根據(jù)操作人員的指令和測量任務(wù)的要求,快速,、準(zhǔn)確地規(guī)劃關(guān)節(jié)臂的運(yùn)動路徑,。在運(yùn)動過程中,控制算法還能實(shí)時監(jiān)測關(guān)節(jié)臂的運(yùn)動狀態(tài),,對運(yùn)動參數(shù)進(jìn)行動態(tài)調(diào)整,,確保關(guān)節(jié)臂在高速運(yùn)動時的平穩(wěn)性和定位精度。例如,,在對復(fù)雜形狀物體進(jìn)行測量時,,智能控制算法能夠根據(jù)測量探頭反饋的實(shí)時位置信息,自動調(diào)整關(guān)節(jié)臂的運(yùn)動軌跡,,使測量探頭能夠沿著物體表面的輪廓進(jìn)行精確測量,,避免出現(xiàn)測量盲區(qū)和誤差,。此外,,一些智能控制算法還具備自學(xué)習(xí)和自適應(yīng)功能,,能夠根據(jù)以往的測量數(shù)據(jù)和工作經(jīng)驗(yàn),對測量過程進(jìn)行優(yōu)化,,提高測量效率和準(zhǔn)確性,。
近年來,隨著人工智能,、物聯(lián)網(wǎng)等技術(shù)的快速發(fā)展,,關(guān)節(jié)臂技術(shù)也迎來了新的發(fā)展機(jī)遇。通過集成智能傳感器,、控制器等元件,,關(guān)節(jié)臂能夠?qū)崿F(xiàn)更高級別的自主控制和協(xié)同作業(yè),為工業(yè)自動化和智能制造提供了更強(qiáng)有力的支持,。關(guān)節(jié)臂技術(shù)的工作原理關(guān)節(jié)臂技術(shù)的工作原理基于關(guān)節(jié)的自由度和連桿的連接方式,。每個關(guān)節(jié)都有一個驅(qū)動機(jī)構(gòu),可以通過電動機(jī),、氣動馬達(dá)或液壓系統(tǒng)來驅(qū)動,。當(dāng)驅(qū)動機(jī)構(gòu)啟動時,它會轉(zhuǎn)動關(guān)節(jié),,并通過連桿傳遞力量到下一個關(guān)節(jié),,從而實(shí)現(xiàn)整個關(guān)節(jié)臂的運(yùn)動。為了實(shí)現(xiàn)精確的控制和定位,,關(guān)節(jié)臂還需要配備先進(jìn)的傳感器和控制系統(tǒng),。傳感器能夠?qū)崟r監(jiān)測關(guān)節(jié)臂的位置、速度和加速度等參數(shù),,并將這些信息反饋給控制系統(tǒng),。控制系統(tǒng)則根據(jù)反饋信息和預(yù)設(shè)的操作指令,,調(diào)整驅(qū)動機(jī)構(gòu)的輸出,,確保關(guān)節(jié)臂能夠按照預(yù)期軌跡進(jìn)行運(yùn)動。此外,,為了提高關(guān)節(jié)臂的精度和穩(wěn)定性,,還需要采用一系列校準(zhǔn)和補(bǔ)償技術(shù)。這些技術(shù)能夠消除機(jī)械臂在制造和裝配過程中產(chǎn)生的誤差,,確保其在各種工況下都能保持高精度和穩(wěn)定性,。關(guān)節(jié)臂的便攜式設(shè)計(jì)使其能夠輕松攜帶到現(xiàn)場進(jìn)行測量,提高工作效率,。

質(zhì)量檢測在質(zhì)量檢測領(lǐng)域,,關(guān)節(jié)臂技術(shù)被廣泛應(yīng)用于三坐標(biāo)測量和尺寸檢測等工序中,。通過集成高精度的傳感器和檢測系統(tǒng),關(guān)節(jié)臂能夠?qū)崿F(xiàn)對復(fù)雜形狀和尺寸的工件的精確測量和檢測,。例如,,在模具制造領(lǐng)域,關(guān)節(jié)臂可以用于模具的精密測量和調(diào)試,;在汽車零部件制造領(lǐng)域,,關(guān)節(jié)臂則可以用于零部件的尺寸檢測和質(zhì)量控制。醫(yī)療手術(shù)在醫(yī)療手術(shù)領(lǐng)域,,關(guān)節(jié)臂技術(shù)也展現(xiàn)出了巨大的潛力,。通過集成先進(jìn)的傳感器和控制系統(tǒng),關(guān)節(jié)臂能夠?qū)崿F(xiàn)高精度,、低創(chuàng)傷的手術(shù)操作,。例如,在骨科手術(shù)中,,關(guān)節(jié)臂可以用于精確的骨骼切割和固定,;在神經(jīng)外科手術(shù)中,關(guān)節(jié)臂則可以用于微小的腦組織操作,。關(guān)節(jié)臂的測量范圍普遍,,從微小的電子元件到大型機(jī)械設(shè)備都能應(yīng)對自如。蘇州三坐標(biāo)關(guān)節(jié)臂推薦廠家
關(guān)節(jié)臂的模塊化設(shè)計(jì)使其易于維護(hù)和升級,。安徽美國關(guān)節(jié)臂服務(wù)電話
傳感器與檢測技術(shù)傳感器與檢測技術(shù)是關(guān)節(jié)臂技術(shù)的重要組成部分,。傳感器能夠?qū)崟r監(jiān)測關(guān)節(jié)臂的位置、速度和加速度等參數(shù),,為控制系統(tǒng)提供反饋信息,。檢測技術(shù)則用于對傳感器采集到的數(shù)據(jù)進(jìn)行處理和分析,以獲取關(guān)節(jié)臂的精確位置和姿態(tài)信息,。隨著傳感器技術(shù)的不斷發(fā)展,,關(guān)節(jié)臂的精度和穩(wěn)定性也得到了明顯提升??刂扑惴ㄅc軟件技術(shù)控制算法與軟件技術(shù)是關(guān)節(jié)臂技術(shù)的靈魂,。控制算法負(fù)責(zé)根據(jù)傳感器采集到的數(shù)據(jù)和預(yù)設(shè)的操作指令,,計(jì)算出驅(qū)動機(jī)構(gòu)的輸出值,,并控制機(jī)械臂按照預(yù)期軌跡進(jìn)行運(yùn)動。軟件技術(shù)則負(fù)責(zé)將控制算法嵌入到關(guān)節(jié)臂的控制系統(tǒng)中,,實(shí)現(xiàn)自動化控制和智能化作業(yè),。隨著人工智能和機(jī)器學(xué)習(xí)技術(shù)的不斷發(fā)展,關(guān)節(jié)臂的控制算法和軟件技術(shù)也將迎來新的發(fā)展機(jī)遇,。安徽美國關(guān)節(jié)臂服務(wù)電話
- 嘉興一鍵閃測影像儀多少錢 2025-06-23
- 衢州??怂箍涤跋駜x圖片 2025-06-23
- 南京海克斯康影像儀多少錢 2025-06-23
- 蘇州全自動影像儀哪個好 2025-06-23
- 杭州一鍵閃測影像儀 2025-06-23
- 無錫手動影像儀價格 2025-06-23
- 南京龍門影像儀調(diào)試 2025-06-23
- 金華半自動影像儀檢修 2025-06-23
- 山東高穩(wěn)定影像儀電話 2025-06-23
- 臺州什么樣影像儀出廠價 2025-06-23
- 金山區(qū)現(xiàn)代負(fù)載保持閥安裝 2025-06-23
- 南通現(xiàn)代液相色譜銷售 2025-06-23
- 江西DN25隔膜壓力表品牌 2025-06-23
- 江蘇 三箱式高低溫試驗(yàn)箱哪家好 2025-06-23
- 安徽手持電橋型號 2025-06-23
- 天津原子吸收分光光度計(jì)教程 2025-06-23
- 湖南有源變壓器容量特性測試儀設(shè)備維修維修價格 2025-06-23
- 蘇州恒溫恒濕實(shí)驗(yàn)室哪家好 2025-06-23
- 麗水客服調(diào)度管理系統(tǒng)費(fèi)用 2025-06-23
- 北京氣體流量計(jì)報價 2025-06-23