-
 疲勞駕駛預(yù)警系統(tǒng)|駕駛員狀態(tài)監(jiān)測儀|司機疲勞駕駛行為監(jiān)測預(yù)警系統(tǒng)
疲勞駕駛預(yù)警系統(tǒng)|駕駛員狀態(tài)監(jiān)測儀|司機疲勞駕駛行為監(jiān)測預(yù)警系統(tǒng)疲勞駕駛預(yù)警系統(tǒng)技術(shù)核X與性能突破 疲勞駕駛預(yù)警系統(tǒng)依托光學(xué)成像識別與AI深度學(xué)習(xí)技術(shù),,構(gòu)建了多維度駕駛員狀態(tài)監(jiān)測體系,。其核X在于: 1,雙模態(tài)特征提?。和ㄟ^非接觸式光學(xué)成像傳感器,,實時捕捉駕駛員面部微表情(如眨眼頻率、瞳孔變化)與頭部姿態(tài)(如點頭、側(cè)傾),結(jié)合方向盤握力,、車道偏離等行為數(shù)據(jù),形成復(fù)合特征集,。例如,,系統(tǒng)可識別駕駛員單次閉眼時間超過1.5秒或連續(xù)3次眨眼間隔異常,觸發(fā)疲勞預(yù)警,。 2,動態(tài)趨勢分析模型:采用LSTM神經(jīng)網(wǎng)絡(luò)對駕駛員狀態(tài)進(jìn)行時序建模,,預(yù)測疲勞趨勢,。例如,當(dāng)系統(tǒng)檢測到駕駛員注意力集中度連續(xù)10分鐘下降15%,,將提前發(fā)出趨勢預(yù)警,,而非JIN依...
2025-05-26 -
 山東SUV疲勞駕駛預(yù)警系統(tǒng)
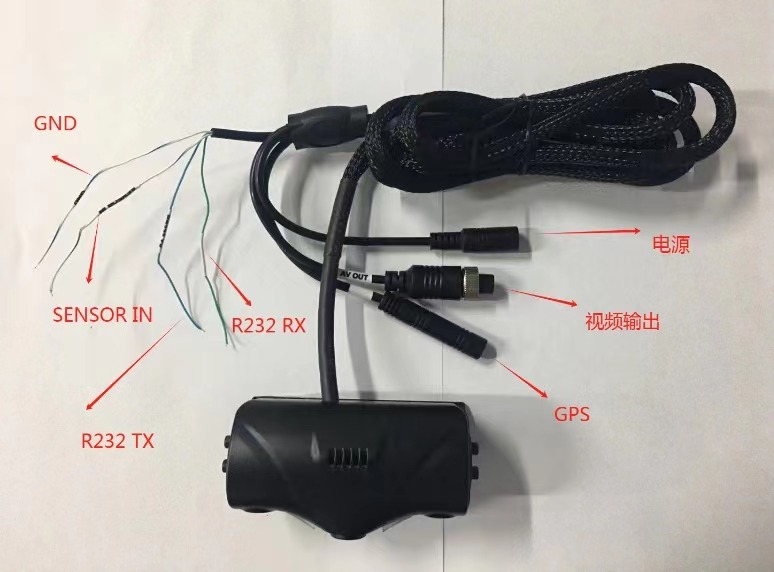
山東SUV疲勞駕駛預(yù)警系統(tǒng)(篇二)DSM-7疲勞駕駛預(yù)警系統(tǒng)是一種重要的汽車安全輔助系統(tǒng),它通過監(jiān)測駕駛員的生理反應(yīng)和駕駛行為來判斷駕駛員是否處于疲勞狀態(tài),,并及時發(fā)出預(yù)警,,以減少因疲勞駕駛引發(fā)的交通事故。PCI盒子作為疲勞駕駛預(yù)警系統(tǒng)的一部分,,通常用于連接外WEI設(shè)備和主機,,實現(xiàn)數(shù)據(jù)的采集、處理和傳輸,。以下是對PCI盒子外WEI設(shè)備連接主機,、振動器、CAN線,、視頻輸出和232串口線的詳細(xì)闡述: 3.CAN線連接功能:CAN(ControllerAreaNetwork)線是一種用于連接汽車內(nèi)部各電子控制單元(ECU)的串行通信協(xié)議,。在疲勞駕駛預(yù)警系統(tǒng)中,,CAN線可以用于實現(xiàn)系統(tǒng)與車輛其他系統(tǒng)(如發(fā)動機控制系統(tǒng)、...
2025-05-26 -
 疲勞駕駛預(yù)警系統(tǒng)|駕駛員狀態(tài)監(jiān)測儀|司機疲勞駕駛行為監(jiān)測預(yù)警系統(tǒng)
疲勞駕駛預(yù)警系統(tǒng)|駕駛員狀態(tài)監(jiān)測儀|司機疲勞駕駛行為監(jiān)測預(yù)警系統(tǒng)車侶疲勞駕駛預(yù)警系統(tǒng)的多場景預(yù)警策略 標(biāo)題:全場景覆蓋:疲勞駕駛預(yù)警系統(tǒng)的靈活預(yù)警模式 摘要:本文闡述系統(tǒng)如何通過聲音,、語言,、震動等多模式預(yù)警,結(jié)合GPS速度聯(lián)動功能,,實現(xiàn)不同駕駛場景下的精細(xì)干預(yù),。 正文: 系統(tǒng)提供三種預(yù)警模式,適應(yīng)不同駕駛環(huán)境: 1,聲音預(yù)警模式:通過高頻蜂鳴聲或警報音提醒駕駛員,,適用于需要立即響應(yīng)的緊急場景(如嚴(yán)重疲勞狀態(tài)),。 2,語音預(yù)警模式:支持中文/英文雙語提示,例如“請保持清醒,,您已進(jìn)入疲勞駕駛狀態(tài)”,。語音內(nèi)容可自定義,避免駕駛員因重復(fù)提示產(chǎn)生適應(yīng)性疲勞,。 3,多設(shè)備聯(lián)動預(yù)警:系統(tǒng)提供豐富的預(yù)警端口,,支持與方向盤震動模...
2025-05-26 -
 疲勞駕駛預(yù)警系統(tǒng)|駕駛員狀態(tài)監(jiān)測儀|司機疲勞駕駛行為監(jiān)測預(yù)警系統(tǒng)
疲勞駕駛預(yù)警系統(tǒng)|駕駛員狀態(tài)監(jiān)測儀|司機疲勞駕駛行為監(jiān)測預(yù)警系統(tǒng)車侶去疲勞駕駛預(yù)警系統(tǒng)的個性化適配與行業(yè)擴(kuò)展 標(biāo)題:從靈敏度調(diào)節(jié)到安全聯(lián)動:疲勞駕駛預(yù)警系統(tǒng)的定制化與行業(yè)應(yīng)用 摘要:本文分析系統(tǒng)如何通過報警靈敏度調(diào)節(jié)、GPS速度聯(lián)動與多設(shè)備聯(lián)動,,滿足不同駕駛員與行業(yè)場景的需求,,并探討其在商用車、特種車輛等領(lǐng)域的應(yīng)用潛力,。 正文: 1,,報警靈敏度調(diào)節(jié):駕駛員可根據(jù)個人駕駛習(xí)慣(如經(jīng)驗、作息規(guī)律)調(diào)節(jié)預(yù)警閾值(如眨眼頻率,、頭部姿態(tài)變化幅度),,實現(xiàn)“人-車”默契交互。例如,,長途貨車司機可適當(dāng)降低靈敏度以減少誤報,,而新手駕駛員則可提高靈敏度以獲得更嚴(yán)格的保護(hù)。 2,,GPS速度聯(lián)動預(yù)警:系統(tǒng)結(jié)合GPS定位與車速數(shù)據(jù),,動態(tài)調(diào)整預(yù)警策略...
2025-05-26 -
 安徽客車司機行為檢測預(yù)警系統(tǒng)報價
安徽客車司機行為檢測預(yù)警系統(tǒng)報價(上篇)疲勞駕駛預(yù)警集成MDVR系統(tǒng)實現(xiàn)內(nèi)置4G模塊,支持WIFI無線下載功能的技術(shù)原理及應(yīng)用 1.技術(shù)原理 1.1內(nèi)置4G模塊4G通信:MDVR內(nèi)置4G模塊,,通過LTE網(wǎng)絡(luò)實現(xiàn)高速數(shù)據(jù)傳輸,,支持視頻、音頻和數(shù)據(jù)的實時傳輸,。網(wǎng)絡(luò)連接:4G模塊通過SIM卡接入移動網(wǎng)絡(luò),,支持多頻段以適應(yīng)不同地區(qū)的網(wǎng)絡(luò)環(huán)境。數(shù)據(jù)傳輸:4G模塊將采集到的視頻和數(shù)據(jù)上傳至云端或服務(wù)器,供遠(yuǎn)程監(jiān)控和管理,。 1.2WIFI無線下載WIFI模塊:MDVR內(nèi)置WIFI模塊,,支持802.11a/b/g/n/ac協(xié)議,提供高速無線連接,。無線下載:通過WIFI,,用戶可從MDVR下載存儲的視頻和數(shù)據(jù)到手機、平板或...
2025-05-26 -
 黑龍江機車司機行為檢測預(yù)警系統(tǒng)
黑龍江機車司機行為檢測預(yù)警系統(tǒng)(下篇)在疲勞駕駛集成MDVR系統(tǒng)中,,TTS喇叭和對講手柄是怎樣通過智慧云平臺下發(fā)指令對車端進(jìn)行交互控制,,監(jiān)控實時作業(yè)情況? 三,、監(jiān)控實時作業(yè)情況 1.視頻采集與傳輸:MDVR系統(tǒng)持續(xù)采集車內(nèi)外視頻數(shù)據(jù),,并通過無線網(wǎng)絡(luò)將其傳輸給智慧云平臺。云平臺接收到視頻數(shù)據(jù)后,,進(jìn)行存儲,、分析和展示,以便用戶能夠?qū)崟r監(jiān)控車輛的作業(yè)情況,。 2.狀態(tài)反饋與報警:MDVR系統(tǒng)還負(fù)責(zé)監(jiān)測車輛的狀態(tài)信息(如車速,、發(fā)動機狀態(tài)等)以及駕駛員的行為(如疲勞駕駛檢測)。一旦發(fā)現(xiàn)異常情況或違規(guī)行為,,MDVR系統(tǒng)將立即向云平臺發(fā)送報警信息,。云平臺接收到報警信息后,可以實時通知用戶或采取其他措施進(jìn)行處理,。 ...
2025-05-26 -
 四川司機行為檢測預(yù)警系統(tǒng)投資
四川司機行為檢測預(yù)警系統(tǒng)投資(中篇)MDVR(Mobile Digital Video Recorders,,車載數(shù)字視頻錄像機)高清車載錄像機與疲勞駕駛預(yù)警設(shè)備的集成應(yīng)用,是一個結(jié)合了音視頻監(jiān)控,、數(shù)據(jù)分析與預(yù)警提示的綜合性系統(tǒng),。以下是如何實現(xiàn)這種集成應(yīng)用的具體步驟和優(yōu)勢: 三、數(shù)據(jù)采集與處理疲勞駕駛預(yù)警系統(tǒng)利用算法對采集到的駕駛員面部特征,、眼部信號等信息進(jìn)行分析,,通過眨眼頻率,、閉眼時間,、頭部運動等參數(shù)判斷駕駛員的疲勞狀態(tài)。一旦檢測到疲勞駕駛行為,,系統(tǒng)將立即發(fā)出預(yù)警信號,。 四、預(yù)警提示與遠(yuǎn)程監(jiān)控預(yù)警提示:當(dāng)疲勞駕駛預(yù)警系統(tǒng)檢測到駕駛員處于疲勞狀態(tài)時,,會通過語音提示,、震動提醒等方式向駕駛員發(fā)出預(yù)警信號,提醒其...
2025-05-26 -
 疲勞駕駛預(yù)警系統(tǒng)|駕駛員狀態(tài)監(jiān)測儀|司機疲勞駕駛行為監(jiān)測預(yù)警系統(tǒng)
疲勞駕駛預(yù)警系統(tǒng)|駕駛員狀態(tài)監(jiān)測儀|司機疲勞駕駛行為監(jiān)測預(yù)警系統(tǒng)車侶疲勞駕駛預(yù)警系統(tǒng)的數(shù)據(jù)存儲與追溯能力 標(biāo)題:視頻同步輸出與MDVR集成:構(gòu)建駕駛員行為數(shù)據(jù)庫 摘要:本文探討系統(tǒng)如何通過視頻同步輸出功能,結(jié)合MDVR實現(xiàn)駕駛員行為數(shù)據(jù)的長期存儲與分析,,為安全管理提供數(shù)據(jù)支撐,。 正文: 系統(tǒng)支持視頻同步輸出至車載MDVR(移動數(shù)字錄像機),實現(xiàn)以下功能: 1,,實時影像存儲:預(yù)警觸發(fā)時,,MDVR自動保存預(yù)警QIAN30秒至后10秒的駕駛員面部及駕駛艙視頻,分辨率達(dá)1080P,,支持H.265編碼壓縮,,存儲空間占用降低50%。 2,,行為分析數(shù)據(jù)庫:長期存儲的視頻數(shù)據(jù)可用于駕駛員行為建模,,例如分析疲勞駕駛的高發(fā)時段、路段或駕...
2025-05-26 -
疲勞駕駛預(yù)警系統(tǒng)|駕駛員狀態(tài)監(jiān)測儀|司機疲勞駕駛行為監(jiān)測預(yù)警系統(tǒng)
車侶疲勞駕駛預(yù)警系統(tǒng)光學(xué)成像系統(tǒng)的創(chuàng)新設(shè)計與環(huán)境適應(yīng)性 標(biāo)題:無感監(jiān)測:光學(xué)成像識別系統(tǒng)的抗干擾與視覺友好性 摘要:本文解析系統(tǒng)如何通過紅外主動成像與窄帶濾波技術(shù),,實現(xiàn)全天候,、抗干擾的駕駛員狀態(tài)監(jiān)測,同時避免對駕駛員視覺造成干擾,。 正文: 系統(tǒng)采用獨特的光學(xué)成像識別技術(shù),,解決傳統(tǒng)監(jiān)測方案在復(fù)雜光照環(huán)境下的痛點: 1,紅外主動成像技術(shù):通過近紅外LED補光(波長850nm),,在夜間或低光照環(huán)境下清晰捕捉駕駛員面部特征,,避免依賴環(huán)境光導(dǎo)致的監(jiān)測失效。 2,,窄帶濾波抗干擾:光學(xué)傳感器內(nèi)置窄帶濾波片,,JIN允許特定波長紅外光通過,有效過濾陽光,、車燈等外部光源的干...
2025-05-26 -
 安徽客車司機行為檢測預(yù)警系統(tǒng)品牌
安徽客車司機行為檢測預(yù)警系統(tǒng)品牌疲勞駕駛預(yù)警系統(tǒng)的工作原理和實際應(yīng)用詳細(xì)闡述如下: 疲勞駕駛預(yù)警系統(tǒng)是一種基于駕駛員生理圖像反應(yīng)的裝置,,主要由ECU(電子控制單元)和攝像頭兩大模塊組成。工作原理: 信息采集:通過安裝在駕駛室內(nèi)的攝像頭捕捉駕駛員的面部特征,、眼部信號以及頭部運動等關(guān)鍵信息,。數(shù)據(jù)分析:將采集到的信息傳輸?shù)紼CU進(jìn)行處理和分析。ECU利用XJ的算法和模型,,對駕駛員的面部特征,、眼部開合狀態(tài)、眨眼頻率,、頭部運動等數(shù)據(jù)進(jìn)行綜合分析,,以推斷駕駛員的疲勞狀態(tài)。根據(jù)分析結(jié)果,,系統(tǒng)能夠判斷駕駛員是否處于疲勞狀態(tài),。此外,,能識別佩戴近視眼鏡的駕駛員,駕駛員人臉識別,。報警提示:一旦系統(tǒng)檢測到駕駛員出現(xiàn)疲勞駕駛的...
2025-05-26 -
 廣西疲勞駕駛預(yù)警系統(tǒng)開發(fā)商
廣西疲勞駕駛預(yù)警系統(tǒng)開發(fā)商(專輯一)自帶算法的疲勞駕駛預(yù)警系統(tǒng)的技術(shù)原理主要基于先進(jìn)的視覺識別技術(shù)和深度學(xué)習(xí)算法,。 一、核XIN技術(shù)與流程視覺識別技術(shù):系統(tǒng)通過安裝在車內(nèi)的攝像頭實時捕捉駕駛員的面部及肢體動作,,如眼睛閉合,、眨眼頻率、打哈欠,、頭部姿態(tài)等,。攝像頭捕捉到的圖像會被快速傳輸?shù)较到y(tǒng)的處理單元。系統(tǒng)利用深度學(xué)習(xí)技術(shù)對這些圖像數(shù)據(jù)進(jìn)行處理和分析,。通過深度卷積神經(jīng)網(wǎng)絡(luò)(CNN)等算法提取面部關(guān)鍵區(qū)域的視覺特征,,如眼睛、嘴巴等,。算法會分析眼睛的開合程度,、閉合時間、眨眼頻率以及打哈欠的頻率等關(guān)鍵指標(biāo),?;谶@些分析,系統(tǒng)準(zhǔn)確地判斷駕駛員是否處于疲勞狀態(tài),。 二,、算法模型構(gòu)建數(shù)據(jù)收集:為了構(gòu)建有效的算法模型,...
2025-05-25 -
 江蘇客車司機行為檢測預(yù)警系統(tǒng)公司
江蘇客車司機行為檢測預(yù)警系統(tǒng)公司(篇二)DSM-7疲勞駕駛預(yù)警系統(tǒng)是一種重要的汽車安全輔助系統(tǒng),,它通過監(jiān)測駕駛員的生理反應(yīng)和駕駛行為來判斷駕駛員是否處于疲勞狀態(tài),,并及時發(fā)出預(yù)警,以減少因疲勞駕駛引發(fā)的交通事故,。PCI盒子作為疲勞駕駛預(yù)警系統(tǒng)的一部分,,通常用于連接外WEI設(shè)備和主機,實現(xiàn)數(shù)據(jù)的采集,、處理和傳輸,。以下是對PCI盒子外WEI設(shè)備連接主機、振動器,、CAN線,、視頻輸出和232串口線的詳細(xì)闡述: 3.CAN線連接功能:CAN(ControllerAreaNetwork)線是一種用于連接汽車內(nèi)部各電子控制單元(ECU)的串行通信協(xié)議。在疲勞駕駛預(yù)警系統(tǒng)中,,CAN線可以用于實現(xiàn)系統(tǒng)與車輛其他系統(tǒng)(如發(fā)動機控制系統(tǒng),、...
2025-05-25 -
 天津礦車司機行為檢測預(yù)警系統(tǒng)
天津礦車司機行為檢測預(yù)警系統(tǒng)(篇二)DSM-7疲勞駕駛預(yù)警系統(tǒng)是一種重要的汽車安全輔助系統(tǒng),,它通過監(jiān)測駕駛員的生理反應(yīng)和駕駛行為來判斷駕駛員是否處于疲勞狀態(tài),,并及時發(fā)出預(yù)警,以減少因疲勞駕駛引發(fā)的交通事故。PCI盒子作為疲勞駕駛預(yù)警系統(tǒng)的一部分,,通常用于連接外WEI設(shè)備和主機,,實現(xiàn)數(shù)據(jù)的采集、處理和傳輸,。以下是對PCI盒子外WEI設(shè)備連接主機,、振動器、CAN線,、視頻輸出和232串口線的詳細(xì)闡述: 3.CAN線連接功能:CAN(ControllerAreaNetwork)線是一種用于連接汽車內(nèi)部各電子控制單元(ECU)的串行通信協(xié)議,。在疲勞駕駛預(yù)警系統(tǒng)中,CAN線可以用于實現(xiàn)系統(tǒng)與車輛其他系統(tǒng)(如發(fā)動機控制系統(tǒng),、...
2025-05-25 -
中國澳門AI疲勞駕駛預(yù)警系統(tǒng)
(上篇)自帶算法識別與云端識別的司機疲勞駕駛預(yù)警系統(tǒng)各自具有獨特的應(yīng)用區(qū)別與優(yōu)勢,,以下是對這兩者的詳細(xì)分析: 自帶算法識別的司機疲勞駕駛預(yù)警系統(tǒng)應(yīng)用區(qū)別數(shù)據(jù)處理與決策:該系統(tǒng)在本地設(shè)備上運行算法,對采集到的駕駛員面部特征,、眼部信號等進(jìn)行實時處理和分析,,從而判斷駕駛員是否疲勞。所有數(shù)據(jù)處理和決策均在本地完成,,不依賴于外部網(wǎng)絡(luò),。系統(tǒng)架構(gòu):系統(tǒng)結(jié)構(gòu)相對緊湊,包括攝像頭,、傳感器,、控制器和算法模塊等關(guān)鍵組件,易于集成到車載系統(tǒng)中,。隱私保護(hù):由于數(shù)據(jù)處理在本地進(jìn)行,,不涉及數(shù)據(jù)上傳和存儲,因此具有更高的隱私保護(hù)性能,。優(yōu)勢實時性強:由于數(shù)據(jù)處理在本地完成,,系統(tǒng)能夠迅速響應(yīng)并發(fā)出預(yù)警,有效減少因網(wǎng)絡(luò)延...
2025-05-25 -
 重慶司機行為識別疲勞駕駛預(yù)警系統(tǒng)
重慶司機行為識別疲勞駕駛預(yù)警系統(tǒng)(下篇)自帶算法與不帶算法的疲勞駕駛預(yù)警系統(tǒng)在功能和應(yīng)用上存在明顯的區(qū)別: 同時,,該系統(tǒng)也適用于對駕駛安全性要求較高的領(lǐng)域,,如商用車輛、特種車輛等,。不帶算法的系統(tǒng):由于功能相對簡單,,可能更適用于一些對駕駛安全性要求不高的場景,或者作為輔助安全設(shè)備與其他高級預(yù)警系統(tǒng)配合使用,。 安裝與維護(hù)自帶算法的系統(tǒng):由于集成了智能算法和高級傳感器,,安裝和維護(hù)成本可能相對較高。同時,,由于數(shù)據(jù)處理在本地完成,,對設(shè)備的計算能力和存儲空間也有一定要求,。不帶算法的系統(tǒng):安裝和維護(hù)成本相對較低,因為系統(tǒng)結(jié)構(gòu)相對簡單,,不需要高級的計算設(shè)備和存儲空間,。 隱私保護(hù)自帶算法的系統(tǒng):如果數(shù)據(jù)處理在本地完成且不...
2025-05-25 -
 山西船舶司機行為檢測預(yù)警系統(tǒng)
山西船舶司機行為檢測預(yù)警系統(tǒng)(上篇)自帶算法的疲勞駕駛預(yù)警系統(tǒng)是基于機器視覺技術(shù)和先進(jìn)的神經(jīng)網(wǎng)絡(luò)人工智能視覺算法開發(fā)的駕駛輔助預(yù)警產(chǎn)品。以下是對其主要特征及安裝應(yīng)用的詳細(xì)介紹: 一,、主要特征智能識別與分析:該系統(tǒng)能夠?qū)崟r捕捉和分析駕駛員的面部特征,、眼部信號和頭部運動等關(guān)鍵信息。通過眨眼頻率,、閉眼時間,、頭部運動等參數(shù)判斷駕駛員的疲勞狀態(tài)。全天候工作能力:系統(tǒng)能夠適應(yīng)不同的光照條件,,包括白天,、夜晚和雨雪等大部分天氣條件。在夜晚或低照度條件下,,系統(tǒng)可自動開啟紅外輔助照明光源,,確保全天候的監(jiān)測效果。非接觸式測試:采用非接觸式的測試方式,,不會對駕駛員產(chǎn)生干擾,。系統(tǒng)不受佩戴眼鏡、墨鏡等使用條件的影響,,能夠準(zhǔn)確識別駕駛員的狀...
2025-05-25 -
 江蘇司機行為檢測預(yù)警系統(tǒng)后期維護(hù)
江蘇司機行為檢測預(yù)警系統(tǒng)后期維護(hù)(篇三)DSM-7疲勞駕駛預(yù)警系統(tǒng)是一種重要的汽車安全輔助系統(tǒng),,它通過監(jiān)測駕駛員的生理反應(yīng)和駕駛行為來判斷駕駛員是否處于疲勞狀態(tài),并及時發(fā)出預(yù)警,,以減少因疲勞駕駛引發(fā)的交通事故,。PCI盒子作為疲勞駕駛預(yù)警系統(tǒng)的一部分,通常用于連接外WEI設(shè)備和主機,,實現(xiàn)數(shù)據(jù)的采集,、處理和傳輸。以下是對PCI盒子外WEI設(shè)備連接主機,、振動器,、CAN線、視頻輸出和232串口線的詳細(xì)闡述: 5.232串口線連接功能:232串口線是一種用于連接計算機和外部設(shè)備(如打印機,、調(diào)制解調(diào)器等)的串行通信接口,。在疲勞駕駛預(yù)警系統(tǒng)中,232串口線可以用于實現(xiàn)系統(tǒng)與外部設(shè)備之間的數(shù)據(jù)通信和指令傳輸,。連接方式:232串口線...
2025-05-25 -
中國臺灣重卡司機行為檢測預(yù)警系統(tǒng)設(shè)計
(下篇)自帶算法且具備視頻同步輸出功能的疲勞駕駛預(yù)警設(shè)備是一種集成了先進(jìn)技術(shù)與智能算法的安全輔助設(shè)備,,以下是對其的具體闡述: 四、應(yīng)用場景該設(shè)備廣泛應(yīng)用于長途客運,、危險品運輸,、物流配送等交通領(lǐng)域,,特別是在需要長時間駕駛的場合下,其作用是尤為明顯的,。通過為駕駛員提供實時的疲勞狀態(tài)監(jiān)測和預(yù)警,該設(shè)備有助于降低因疲勞駕駛引發(fā)的交通事故風(fēng)險,,保障道路交通安全,。 五、優(yōu)勢與特點實時監(jiān)測:設(shè)備能夠?qū)崟r監(jiān)測駕駛員的疲勞狀態(tài),,并在必要時發(fā)出預(yù)警,。準(zhǔn)確性高:利用先進(jìn)的算法和傳感器技術(shù),設(shè)備能夠準(zhǔn)確判斷駕駛員的疲勞程度,。易于安裝:設(shè)備體積小巧,、安裝方便,可以輕松地集成到現(xiàn)有的車輛系統(tǒng)中,??蓴U(kuò)展性強...
2025-05-25 -
四川司機行為檢測預(yù)警系統(tǒng)功能
(下篇)自帶算法的疲勞駕駛預(yù)警系統(tǒng)采用獨特的圖像識別技術(shù),能夠在復(fù)雜多變的駕駛環(huán)境中有效監(jiān)測駕駛員的疲勞狀態(tài),,同時避免外界光源對監(jiān)測效果的干擾,。以下是對該系統(tǒng)如何避免外界光源干擾的詳細(xì)闡述: 六、實際應(yīng)用中的驗證與調(diào)整在實際應(yīng)用中,,系統(tǒng)會根據(jù)不同場景和光照條件進(jìn)行驗證和調(diào)整,。通過收集和分析大量實際數(shù)據(jù),系統(tǒng)能夠不斷優(yōu)化算法和參數(shù),,以適應(yīng)更復(fù)雜多變的光照環(huán)境,。 綜上所述,自帶算法的疲勞駕駛預(yù)警系統(tǒng)通過采用光源校準(zhǔn),、濾光技術(shù),、偏振光源與偏振片的使用、圖像預(yù)處理與增強技術(shù),、先進(jìn)的圖像處理算法以及硬件與軟件的協(xié)同優(yōu)化等措施,,能夠有效地避免外界光源對監(jiān)測效果的干擾。這些措施共同構(gòu)成了系統(tǒng)...
2025-05-25 -
 中國臺灣疲勞駕駛預(yù)警系統(tǒng)設(shè)定
中國臺灣疲勞駕駛預(yù)警系統(tǒng)設(shè)定(第1篇)車侶獨LI算法的疲勞駕駛預(yù)警設(shè)備功能簡捷實用,,預(yù)警實時準(zhǔn)確,,操作簡單易用,外形美觀靈巧,駕駛員狀態(tài)監(jiān)測精度非常高,,疲勞駕駛行為,、粗心駕駛行為預(yù)警準(zhǔn)確率高達(dá)99%,獨CHUANG精細(xì)的面部特征鎖定分析功能,實時檢測眼睛狀態(tài)變化,,預(yù)判疲勞狀態(tài)準(zhǔn)確率達(dá)95%,獨特的圖像識別系統(tǒng),,避免外界光源干擾檢測效果,,確保產(chǎn)品的預(yù)警功能全天候巡航監(jiān)測,獨具CVBS視頻輸出功能,實時顯示面部特征區(qū)域檢測框,,便于用戶掌握產(chǎn)品監(jiān)測狀態(tài),用戶可以根據(jù)駕駛習(xí)慣調(diào)整產(chǎn)品預(yù)警靈敏度和音量,,提供1-3級可選,增強產(chǎn)品適應(yīng)不同駕駛環(huán)境的能力,獨有的GPS車速檢測功能,,確保車輛在停止?fàn)顟B(tài)時關(guān)閉所有檢測功能,,避免干擾駕駛...
2025-05-24 -
 山東疲勞駕駛預(yù)警系統(tǒng)作用
山東疲勞駕駛預(yù)警系統(tǒng)作用(中篇)自帶算法的疲勞駕駛預(yù)警系統(tǒng)是一種先進(jìn)的技術(shù),旨在通過監(jiān)測駕駛員的疲勞狀態(tài)并及時發(fā)出預(yù)警,,以提高駕駛安全,。該系統(tǒng)具有豐富的外WEI設(shè)備聯(lián)動接口,可以連接多種設(shè)備以實現(xiàn)全方WEI的預(yù)警和管理功能,。以下是對該系統(tǒng)可連接的方向盤振動器,、座椅振動器以及MDVR平臺進(jìn)行詳細(xì)闡述: 實時監(jiān)控:MDVR平臺可以實時接收并顯示駕駛員的疲勞狀態(tài)、車輛行駛軌跡,、速度等關(guān)鍵信息,,為管理人員提供全MIAN的監(jiān)控視野。數(shù)據(jù)分析:利用大數(shù)據(jù)分析技術(shù),,MDVR平臺可以對存儲的數(shù)據(jù)進(jìn)行深入挖掘和分析,,生成疲勞駕駛統(tǒng)計報表、車輛行駛軌跡圖等關(guān)鍵信息,,為車隊管理和安全駕駛提供有力支持,。遠(yuǎn)程管理:管理人員可以通過M...
2025-05-24 -
物聯(lián)網(wǎng)疲勞駕駛預(yù)警系統(tǒng)廠家供應(yīng)
(上篇)在疲勞駕駛集成MDVR系統(tǒng)中,TTS喇叭和對講手柄是怎樣通過智慧云平臺下發(fā)指令對車端進(jìn)行交互控制,,監(jiān)控實時作業(yè)情況,? 在疲勞駕駛集成MDVR(MobileDigitalVideoRecorders,車載數(shù)字視頻錄像機)系統(tǒng)中,,TTS喇叭和對講手柄通過智慧云平臺下發(fā)指令對車端進(jìn)行交互控制,,并監(jiān)控實時作業(yè)情況的過程,涉及多個技術(shù)環(huán)節(jié)和設(shè)備的協(xié)同工作,。以下是對這一過程的詳細(xì)解析: 一,、系統(tǒng)架構(gòu)與組件功能 1.智慧云平臺:作為整個系統(tǒng)的控制中心,云平臺負(fù)責(zé)接收,、處理并下發(fā)指令給車端設(shè)備,。它提供API接口,用于接收來自用戶或其他系統(tǒng)的請求,,并根據(jù)請求內(nèi)容生成相應(yīng)的控制指令,。...
2025-05-24 -
內(nèi)蒙古司機行為監(jiān)控司機行為檢測預(yù)警系統(tǒng)
(中篇)MDVR(Mobile Digital Video Recorders,車載數(shù)字視頻錄像機)高清車載錄像機與疲勞駕駛預(yù)警設(shè)備的集成應(yīng)用,是一個結(jié)合了音視頻監(jiān)控,、數(shù)據(jù)分析與預(yù)警提示的綜合性系統(tǒng),。以下是如何實現(xiàn)這種集成應(yīng)用的具體步驟和優(yōu)勢: 三、數(shù)據(jù)采集與處理疲勞駕駛預(yù)警系統(tǒng)利用算法對采集到的駕駛員面部特征,、眼部信號等信息進(jìn)行分析,,通過眨眼頻率、閉眼時間,、頭部運動等參數(shù)判斷駕駛員的疲勞狀態(tài),。一旦檢測到疲勞駕駛行為,系統(tǒng)將立即發(fā)出預(yù)警信號,。 四,、預(yù)警提示與遠(yuǎn)程監(jiān)控預(yù)警提示:當(dāng)疲勞駕駛預(yù)警系統(tǒng)檢測到駕駛員處于疲勞狀態(tài)時,,會通過語音提示,、震動提醒等方式向駕駛員發(fā)出預(yù)警信號,提醒其...
2025-05-24 -
云南疲勞駕駛預(yù)警系統(tǒng)技術(shù)解決方案
疲勞駕駛預(yù)警系統(tǒng)的工作原理和實際應(yīng)用詳細(xì)闡述如下: 疲勞駕駛預(yù)警系統(tǒng)是一種基于駕駛員生理圖像反應(yīng)的裝置,,主要由ECU(電子控制單元)和攝像頭兩大模塊組成,。工作原理: 信息采集:通過安裝在駕駛室內(nèi)的攝像頭捕捉駕駛員的面部特征、眼部信號以及頭部運動等關(guān)鍵信息,。數(shù)據(jù)分析:將采集到的信息傳輸?shù)紼CU進(jìn)行處理和分析,。ECU利用XJ的算法和模型,對駕駛員的面部特征,、眼部開合狀態(tài),、眨眼頻率、頭部運動等數(shù)據(jù)進(jìn)行綜合分析,,以推斷駕駛員的疲勞狀態(tài),。根據(jù)分析結(jié)果,系統(tǒng)能夠判斷駕駛員是否處于疲勞狀態(tài),。此外,,能識別佩戴近視眼鏡的駕駛員,駕駛員人臉識別,。報警提示:一旦系統(tǒng)檢測到駕駛員出現(xiàn)疲勞駕駛的...
2025-05-24 -
河南AI司機行為檢測預(yù)警系統(tǒng)
(第2篇)車侶獨LI算法的疲勞駕駛預(yù)警設(shè)備功能簡捷實用,,預(yù)警實時準(zhǔn)確,操作簡單易用,,外形美觀靈巧,駕駛員狀態(tài)監(jiān)測精度非常高,,疲勞駕駛行為、粗心駕駛行為預(yù)警準(zhǔn)確率高達(dá)99%,獨chuang精細(xì)的面部特征鎖定分析功能,,實時檢測眼睛狀態(tài)變化,,預(yù)判疲勞狀態(tài)準(zhǔn)確率達(dá)95%,獨特的圖像識別系統(tǒng),避免外界光源干擾檢測效果,,確保產(chǎn)品的預(yù)警功能全天候巡航監(jiān)測,獨具CVBS視頻輸出功能,,實時顯示面部特征區(qū)域檢測框,,便于用戶掌握產(chǎn)品監(jiān)測狀態(tài),用戶可以根據(jù)駕駛習(xí)慣調(diào)整產(chǎn)品預(yù)警靈敏度和音量,提供1-3級可選,,增強產(chǎn)品適應(yīng)不同駕駛環(huán)境的能力,獨有的GPS車速檢測功能,,確保車輛在停止?fàn)顟B(tài)時關(guān)閉所有檢測功能,避免干擾駕駛...
2025-05-24 -
遼寧司機行為檢測預(yù)警系統(tǒng)開發(fā)平臺
(第1篇)車侶獨LI算法的疲勞駕駛預(yù)警設(shè)備功能簡捷實用,,預(yù)警實時準(zhǔn)確,,操作簡單易用,外形美觀靈巧,駕駛員狀態(tài)監(jiān)測精度非常高,,疲勞駕駛行為,、粗心駕駛行為預(yù)警準(zhǔn)確率高達(dá)99%,獨CHUANG精細(xì)的面部特征鎖定分析功能,實時檢測眼睛狀態(tài)變化,,預(yù)判疲勞狀態(tài)準(zhǔn)確率達(dá)95%,獨特的圖像識別系統(tǒng),,避免外界光源干擾檢測效果,確保產(chǎn)品的預(yù)警功能全天候巡航監(jiān)測,獨具CVBS視頻輸出功能,,實時顯示面部特征區(qū)域檢測框,,便于用戶掌握產(chǎn)品監(jiān)測狀態(tài),用戶可以根據(jù)駕駛習(xí)慣調(diào)整產(chǎn)品預(yù)警靈敏度和音量,提供1-3級可選,,增強產(chǎn)品適應(yīng)不同駕駛環(huán)境的能力,獨有的GPS車速檢測功能,,確保車輛在停止?fàn)顟B(tài)時關(guān)閉所有檢測功能,避免干擾駕駛...
2025-05-24 -
海南商用車疲勞駕駛預(yù)警系統(tǒng)
(下篇)自帶算法的疲勞駕駛預(yù)警系統(tǒng)中,,GPS的功能并不僅限于獲得車速信息,,但確實在這一方面發(fā)揮著重要作用。以下是對GPS在疲勞駕駛預(yù)警系統(tǒng)中獲得車速信息功能的詳細(xì)闡述: 例如,,當(dāng)GPS檢測到車速異常時,,系統(tǒng)可以結(jié)合方向盤的轉(zhuǎn)向頻率和幅度等信息來判斷駕駛員是否處于疲勞狀態(tài)。三,、GPS車速信息的準(zhǔn)確性與局限性雖然GPS在獲取車速信息方面具有一定的優(yōu)勢,,但也存在一些局限性。例如,,當(dāng)車輛行駛在復(fù)雜環(huán)境(如隧道,、城市峽谷等)中時,GPS信號可能會受到干擾或遮擋,,導(dǎo)致車速信息不準(zhǔn)確,。此外,由于GPS是基于位置變化來計算車速的,,因此在短時間內(nèi)(如幾秒鐘內(nèi))的車速變化可能無法被準(zhǔn)確捕捉,。為了提高GP...
2025-05-24 -
北京司機行為檢測預(yù)警系統(tǒng)進(jìn)度安排
(中篇)自帶算法且具備視頻同步輸出功能的疲勞駕駛預(yù)警設(shè)備是一種集成了先進(jìn)技術(shù)與智能算法的安全輔助設(shè)備,以下是對其的具體闡述: 同時,設(shè)備還可以將預(yù)警信息發(fā)送到后臺系統(tǒng),,以便相關(guān)人員及時采取措施進(jìn)行干預(yù),。 三、技術(shù)原理傳感器采集:設(shè)備利用攝像頭,、紅外線傳感器等硬件設(shè)備,,實時收集駕駛員的生理數(shù)據(jù)和周圍環(huán)境信息。數(shù)據(jù)預(yù)處理:對采集到的數(shù)據(jù)進(jìn)行去噪,、濾波等預(yù)處理操作,,以保證數(shù)據(jù)的可靠和準(zhǔn)確。算法分析:通過圖像識別,、模式識別等算法對處理后的數(shù)據(jù)進(jìn)行分析,,判斷駕駛員是否處于疲勞狀態(tài)。這包括對駕駛員自身特征的檢測(如生理指標(biāo),、生理反應(yīng))以及結(jié)合車輛行駛狀態(tài)的綜合判斷(如轉(zhuǎn)向頻率,、剎車頻率、行...
2025-05-24 -
 浙江新能源汽車疲勞駕駛預(yù)警系統(tǒng)
浙江新能源汽車疲勞駕駛預(yù)警系統(tǒng)(下篇)自帶算法且具備視頻同步輸出功能的疲勞駕駛預(yù)警設(shè)備是一種集成了先進(jìn)技術(shù)與智能算法的安全輔助設(shè)備,,以下是對其的具體闡述: 四,、應(yīng)用場景該設(shè)備廣泛應(yīng)用于長途客運,、危險品運輸,、物流配送等交通領(lǐng)域,特別是在需要長時間駕駛的場合下,,其作用是尤為明顯的,。通過為駕駛員提供實時的疲勞狀態(tài)監(jiān)測和預(yù)警,該設(shè)備有助于降低因疲勞駕駛引發(fā)的交通事故風(fēng)險,,保障道路交通安全,。 五、優(yōu)勢與特點實時監(jiān)測:設(shè)備能夠?qū)崟r監(jiān)測駕駛員的疲勞狀態(tài),,并在必要時發(fā)出預(yù)警,。準(zhǔn)確性高:利用先進(jìn)的算法和傳感器技術(shù),設(shè)備能夠準(zhǔn)確判斷駕駛員的疲勞程度,。易于安裝:設(shè)備體積小巧,、安裝方便,可以輕松地集成到現(xiàn)有的車輛系統(tǒng)中,??蓴U(kuò)展性強...
2025-05-24 -
 廣東4G通信司機行為檢測預(yù)警系統(tǒng)
廣東4G通信司機行為檢測預(yù)警系統(tǒng)(下篇)自帶算法識別與云端識別的司機疲勞駕駛預(yù)警系統(tǒng)各自具有獨特的應(yīng)用區(qū)別與優(yōu)勢,以下是對這兩者的詳細(xì)分析: 云端服務(wù)器具有強大的計算能力和存儲能力,,能夠處理大量數(shù)據(jù)并快速做出決策,。系統(tǒng)架構(gòu):系統(tǒng)包括前端采集設(shè)備(如攝像頭)、數(shù)據(jù)傳輸網(wǎng)絡(luò)和后端識別服務(wù)器等關(guān)鍵組件。前端設(shè)備負(fù)責(zé)數(shù)據(jù)采集,,后端服務(wù)器負(fù)責(zé)數(shù)據(jù)處理和決策,。由于數(shù)據(jù)存儲在云端,多個設(shè)備可以共享數(shù)據(jù),,實現(xiàn)協(xié)同工作和數(shù)據(jù)分析,。云端服務(wù)器可以方便地更新和升級算法,提升識別精度和適應(yīng)性,。云端服務(wù)器具有強大的數(shù)據(jù)存儲能力,,可以長期保存駕駛員的駕駛數(shù)據(jù)。這些數(shù)據(jù)可以用于后續(xù)的數(shù)據(jù)分析和研究,。由于數(shù)據(jù)存儲在云端,,系統(tǒng)可以與其他云端服務(wù)進(jìn)行...
2025-05-24