蘇州本地機器人控制系統(tǒng)價格
機器人控制系統(tǒng)是一個由多關(guān)節(jié)組成的復(fù)雜系統(tǒng),各關(guān)節(jié)間通過伺服機構(gòu)實現(xiàn)聯(lián)動,,共同完成復(fù)雜的運動任務(wù)??刂葡到y(tǒng)通過接收傳感器檢測的信號,,根據(jù)操作任務(wù)的要求,驅(qū)動機械臂中的各臺電動機,,實現(xiàn)對機器人運動的精確控制,。在這個過程中,,控制系統(tǒng)不僅需要保證各關(guān)節(jié)的協(xié)調(diào)運動,,還需要確保機器人在運動過程中的穩(wěn)定性和準確性,??刂葡到y(tǒng)的特點在于其高度的協(xié)調(diào)性和精確性。由于機器人通常具有多個自由度,,每個自由度都包含一個伺服機構(gòu),,控制系統(tǒng)在實行控制指令時,需要將這些伺服機構(gòu)協(xié)調(diào)起來,,以確保機器人運動的正確性和穩(wěn)定性。此外,,控制系統(tǒng)還具備較高的重復(fù)定位精度和動態(tài)響應(yīng)速度,,能夠在復(fù)雜的工作環(huán)境中迅速調(diào)整控制信號,防止機器人出現(xiàn)運動位置偏差或與其他物體發(fā)生碰撞,。機器人控制系統(tǒng)可以實現(xiàn)機器人的追蹤和定位功能,,如目標跟蹤和地圖構(gòu)建等。蘇州本地機器人控制系統(tǒng)價格
機器人控制系統(tǒng)的一個重要特點是其靈活性,。機器人控制系統(tǒng)可以根據(jù)不同的任務(wù)需求進行靈活的調(diào)整和配置,。這種靈活性使得機器人能夠適應(yīng)不同的工作環(huán)境和任務(wù)要求,提高了機器人的適應(yīng)性和應(yīng)用范圍,。 首先,,機器人控制系統(tǒng)可以根據(jù)任務(wù)的不同進行編程和調(diào)整。通過編寫不同的程序,,機器人可以執(zhí)行不同的任務(wù),,如裝配、焊接、搬運等,。這種靈活性使得機器人能夠適應(yīng)不同的生產(chǎn)線和工作場景,,提高了生產(chǎn)效率和靈活性。 其次,,機器人控制系統(tǒng)可以根據(jù)環(huán)境的變化進行自適應(yīng)調(diào)整,。通過傳感器和反饋機制,機器人可以感知環(huán)境的變化,,并根據(jù)需要進行相應(yīng)的調(diào)整,。例如,當機器人在執(zhí)行任務(wù)時遇到障礙物,,控制系統(tǒng)可以通過傳感器檢測到,,并自動調(diào)整機器人的路徑或動作,以避免碰撞或損壞,。 此外,,機器人控制系統(tǒng)還可以根據(jù)操作人員的指令進行靈活的控制。通過人機交互界面,,操作人員可以對機器人進行實時監(jiān)控和控制,,調(diào)整機器人的動作、速度和位置等參數(shù),。這種靈活性使得機器人能夠與人類進行協(xié)作,,實現(xiàn)更高效的工作。溫州網(wǎng)絡(luò)機器人控制系統(tǒng)什么價格機器人控制系統(tǒng)可以實現(xiàn)機器人的安全保護和緊急停止功能,。

機器人控制系統(tǒng)在醫(yī)療領(lǐng)域中起著重要的作用。隨著人口老齡化的加劇和醫(yī)療需求的增加,,機器人在醫(yī)療領(lǐng)域的應(yīng)用越來越廣闊,。機器人控制系統(tǒng)是機器人能夠完成各種醫(yī)療任務(wù)的關(guān)鍵。它通過對機器人的運動,、感知和決策進行控制,,使機器人能夠高效地完成各種醫(yī)療任務(wù)。機器人控制系統(tǒng)可以提高手術(shù)的精確性和安全性,。機器人可以通過高精度的運動和操作,,實現(xiàn)對患者的精確診療。機器人可以進行微創(chuàng)手術(shù),,減少手術(shù)創(chuàng)傷和恢復(fù)時間,。通過機器人控制系統(tǒng)的監(jiān)控和保護,可以及時發(fā)現(xiàn)和處理手術(shù)中的異常情況,,保證手術(shù)的安全性,。機器人控制系統(tǒng)可以提高醫(yī)療資源的利用效率,。機器人可以承擔一些繁重和重復(fù)性高的醫(yī)療工作,減輕醫(yī)護人員的負擔,。機器人可以進行精細的檢測和測量,,提供準確的醫(yī)療數(shù)據(jù)。通過機器人控制系統(tǒng)的分析和處理,,可以提供更加準確和及時的診斷結(jié)果,,提高醫(yī)療資源的利用效率。
機器人控制系統(tǒng)的功能,,機器人控制系統(tǒng)具有多種功能,以滿足不同領(lǐng)域和場景的需求,。首先,,控制系統(tǒng)具有記憶功能,能夠存儲作業(yè)順序,、運動路徑,、運動方式、運動速度和與生產(chǎn)工藝有關(guān)的信息,,使機器人能夠按照預(yù)設(shè)的程序進行工作,。其次,控制系統(tǒng)具有示教功能,,允許通過離線編程,、在線示教或遙控示教等方式,對機器人進行工作軌跡和參數(shù)的設(shè)定,。此外,,控制系統(tǒng)還具有與設(shè)備聯(lián)系功能,包括輸入和輸出接口,、通信接口,、網(wǎng)絡(luò)接口和同步接口等,實現(xiàn)了機器人與其他設(shè)備和系統(tǒng)的信息交換,。在控制模式上,,機器人控制系統(tǒng)主要包括開環(huán)控制和閉環(huán)控制兩種類型。開環(huán)控制直接根據(jù)預(yù)設(shè)的運動軌跡和命令控制執(zhí)行器的運動,,不對機器人運動過程中的誤差進行糾正,,適用于對精度要求不高的場合。閉環(huán)控制則利用傳感器和控制算法對機器人的狀態(tài)進行實時監(jiān)測和調(diào)節(jié),,使機器人能夠自動糾正誤差并實現(xiàn)精確的運動控制,,常用于對精度和穩(wěn)定性要求較高的場合。機器人控制系統(tǒng)采用了低功耗設(shè)計,,降低了運行成本,。
機器人控制系統(tǒng)的特點之一是靈活性,。機器人控制系統(tǒng)可以根據(jù)不同的任務(wù)需求進行靈活的調(diào)整和配置。通過改變控制系統(tǒng)的參數(shù)和算法,,可以使機器人適應(yīng)不同的工作環(huán)境和任務(wù)要求,。例如,當機器人從事裝配任務(wù)時,,控制系統(tǒng)可以根據(jù)不同的零件尺寸和形狀進行調(diào)整,,以確保準確的裝配。而當機器人從事搬運任務(wù)時,,控制系統(tǒng)可以根據(jù)不同的物體重量和形狀進行調(diào)整,,以保證安全和高效的搬運操作。因此,,機器人控制系統(tǒng)的靈活性使得機器人能夠適應(yīng)不同的工作需求,,提高了其應(yīng)用的廣闊性和適用性。機器人控制系統(tǒng)的特點之二是精確性,。機器人控制系統(tǒng)通過精確的傳感器和精密的控制算法,,可以實現(xiàn)對機器人運動和操作的精確控制。例如,,在進行精細裝配任務(wù)時,,機器人控制系統(tǒng)可以通過高精度的傳感器對零件的位置和姿態(tài)進行實時監(jiān)測,并根據(jù)需要進行微調(diào)和校正,,以確保裝配的精度和質(zhì)量,。 機器人控制系統(tǒng)可以通過編程指令來控制機器人的運動、操作和執(zhí)行任務(wù),。嘉興品牌機器人控制系統(tǒng)好不好
機器人控制系統(tǒng)采用了先進的路徑規(guī)劃算法,,確保機器人在復(fù)雜環(huán)境中也能找到優(yōu)行進路線。蘇州本地機器人控制系統(tǒng)價格
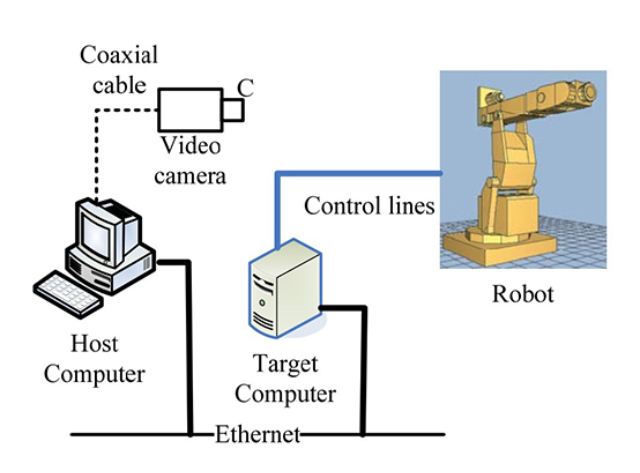
控制器是整個控制系統(tǒng)的中心組件,,主要由控制芯片,、調(diào)節(jié)器、存儲器,、接口和顯示器等構(gòu)成,。控制器負責機器人控制程序的運行,、傳感器數(shù)據(jù)的采集以及執(zhí)行器命令的下達和轉(zhuǎn)換,。通過運行控制算法,控制器能夠精確控制機器人的運動軌跡和操作行為,。軟件部分主要包括操作系統(tǒng),、控制算法和程序接口。操作系統(tǒng)負責管理整個系統(tǒng)的進程,、資源和接口,,保證系統(tǒng)的穩(wěn)定和可靠性,。控制算法是機器人控制系統(tǒng)的中心技術(shù),,包括機器人運動學和動力學算法,、傳感器數(shù)據(jù)處理算法和機器人決策算法等,直接決定了機器人的運動和操作行為,。程序接口則為其他軟件模塊提供接口和協(xié)議支持,,便于系統(tǒng)的集成和擴展。蘇州本地機器人控制系統(tǒng)價格
無錫市點杰自動化科技有限公司是一家有著先進的發(fā)展理念,,先進的管理經(jīng)驗,,在發(fā)展過程中不斷完善自己,要求自己,,不斷創(chuàng)新,,時刻準備著迎接更多挑戰(zhàn)的活力公司,在江蘇省等地區(qū)的商務(wù)服務(wù)中匯聚了大量的人脈以及**,,在業(yè)界也收獲了很多良好的評價,,這些都源自于自身的努力和大家共同進步的結(jié)果,,這些評價對我們而言是比較好的前進動力,,也促使我們在以后的道路上保持奮發(fā)圖強、一往無前的進取創(chuàng)新精神,,努力把公司發(fā)展戰(zhàn)略推向一個新高度,,在全體員工共同努力之下,全力拼搏將共同無錫市點杰自動化供應(yīng)和您一起攜手走向更好的未來,,創(chuàng)造更有價值的產(chǎn)品,,我們將以更好的狀態(tài),更認真的態(tài)度,,更飽滿的精力去創(chuàng)造,,去拼搏,去努力,,讓我們一起更好更快的成長,!
- 蘇州個人機器人控制系統(tǒng)價格 2025-04-28
- 杭州變頻器控制系統(tǒng)大概價格 2025-04-28
- 上海企業(yè)智能倉儲系統(tǒng)哪家好 2025-04-28
- 蘇州什么是PLC控制系統(tǒng)好不好 2025-04-28
- 蘇州什么是機器人控制系統(tǒng)哪家好 2025-04-28
- 溫州互聯(lián)網(wǎng)機器人控制系統(tǒng)多少錢 2025-04-28
- 湖州互聯(lián)網(wǎng)變頻器控制系統(tǒng)大概價格 2025-04-28
- 常州個人智能倉儲系統(tǒng) 2025-04-28
- 南京企業(yè)變頻器控制系統(tǒng) 2025-04-27
- 南京網(wǎng)絡(luò)變頻器控制系統(tǒng)有哪些 2025-04-27
- 中山輪扣腳手架租賃哪里有 2025-04-28
- 蘇州創(chuàng)新冷鏈物流服務(wù)廠家電話 2025-04-28
- 淮安電臺廣告策劃市場 2025-04-28
- 北京宴會廳酒店裝修公司 2025-04-28
- 徐州如何婚慶對象 2025-04-28
- 煙臺智慧文旅平臺 2025-04-28
- 紹興孵化器認定申報材料 2025-04-28
- 南京什么企業(yè)可編程邏輯控制器比較好 2025-04-28
- 貴州服務(wù)行業(yè)求職不需要經(jīng)驗 2025-04-28
- 虹口區(qū)正規(guī)技術(shù)服務(wù)好處 2025-04-28