-
掘進(jìn)機(jī)常見(jiàn)故障分析及處理方法
-
懸臂式掘進(jìn)機(jī)與全斷面掘進(jìn)機(jī)的區(qū)別
-
正確使用采煤機(jī)截齒及其重要性
-
掘進(jìn)機(jī)截齒:礦山開(kāi)采的鋒銳利器
-
掘進(jìn)機(jī)的多樣類型與廣闊市場(chǎng)前景
-
怎么樣對(duì)掘進(jìn)機(jī)截割減速機(jī)進(jìn)行潤(rùn)滑呢?
-
哪些因素會(huì)影響懸臂式掘進(jìn)機(jī)配件的性能?
-
懸臂式掘進(jìn)機(jī)常見(jiàn)型號(hào)
-
懸臂式掘進(jìn)機(jī)的相關(guān)介紹及發(fā)展現(xiàn)狀
-
掘錨機(jī)配件的檢修及維護(hù)
快速目標(biāo)檢測(cè)價(jià)格信息
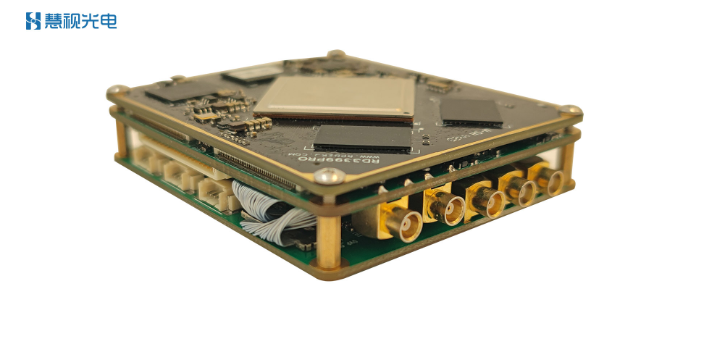
在城市空間管理中,AI中臺(tái)基于人工智能算法與視頻技術(shù)組件,,深入道路交通,、工作學(xué)習(xí)、生活?yuàn)蕵?lè),、城市環(huán)境,、互聯(lián)網(wǎng)信息等城市空間,形成智慧交通,、客流管理,、特定崗位管理,、城市環(huán)境治理,、互聯(lián)網(wǎng)內(nèi)容安全等一系列產(chǎn)品模塊,應(yīng)用于車輛及行人違章行為自動(dòng)識(shí)別抓拍和報(bào)警推送,、公共場(chǎng)所及大型活動(dòng)區(qū)域等地大規(guī)??土魇鑼?dǎo)管理、服務(wù)窗口及工業(yè)崗位違規(guī)行為監(jiān)督管理,、網(wǎng)絡(luò)暴恐內(nèi)容及敏感內(nèi)容審核等多種場(chǎng)景,,實(shí)現(xiàn)自動(dòng)識(shí)別、智能分析與輔助決策等功能,?;垡昍K3588圖像處理板能實(shí)現(xiàn)24小時(shí)、無(wú)間隙信息化監(jiān)控,??焖倌繕?biāo)檢測(cè)價(jià)格信息
目標(biāo)檢測(cè)
近年來(lái),隨著人工智能的發(fā)展,,無(wú)人機(jī)的使用呈現(xiàn)出飛速增長(zhǎng),,而無(wú)人機(jī)對(duì)目標(biāo)的自主檢測(cè)、自主跟蹤是極具難度的研究方向之一,,這與智慧交通,、智慧倉(cāng)庫(kù),、智能電力電纜巡檢、重要設(shè)施的監(jiān)測(cè)等應(yīng)用密切相關(guān),。吊艙是無(wú)人機(jī)的重要組成部分,,而光電吊艙一般由可見(jiàn)光(或者紅外)、圖像處理板,、伺服等部分組成,,圖像處理板通過(guò)前端的圖像對(duì)目標(biāo)進(jìn)行檢測(cè)并根據(jù)需要對(duì)目標(biāo)進(jìn)行跟蹤,同時(shí)可能按照具體需要輸出目標(biāo)的坐標(biāo)數(shù)據(jù)等信息,,因此圖像處理板成為了光電吊艙的重要部件之一,,起到關(guān)鍵的鏈接、數(shù)據(jù)處理的作用,。早期光電吊艙因?yàn)轶w積大,、重量重、成本高,,主要應(yīng)用在較大的飛機(jī)上,,尤其作戰(zhàn)的飛機(jī)。隨著民品無(wú)人機(jī)的發(fā)展,,大多數(shù)四旋翼機(jī)的起飛重量小于15公斤,,導(dǎo)致了機(jī)載設(shè)備的有效載荷和電池續(xù)航能力非常有限。在這種情況下,,如何降低功耗,、減少體積同時(shí)又不降低性能成為小型無(wú)人機(jī)的研究熱點(diǎn)?;垡暪怆婍憫?yīng)行業(yè)需求,,經(jīng)過(guò)技術(shù)的不斷迭代更新,推出了全國(guó)產(chǎn)化的RV1126處理板,,該處理板支持基于深度學(xué)習(xí)的目標(biāo)檢測(cè)算法(人,、車以及特定目標(biāo))、支持SDI高清/標(biāo)清視頻輸出,、支持疊加OSD信息,,重量只有5g,直徑*37mm,,基本達(dá)到了尺寸的要求,。工業(yè)目標(biāo)檢測(cè)應(yīng)用慧視光電推出全國(guó)產(chǎn)化RV1126處理板。
海上搜救的關(guān)鍵在于及時(shí)發(fā)現(xiàn)被救對(duì)象,,需要較強(qiáng)的技術(shù)系統(tǒng)等支持,。目前我國(guó)海上搜救是采用救助船或救助直升機(jī)上簡(jiǎn)單的觀測(cè)儀和照明系統(tǒng)的視覺(jué)搜索方法,也有經(jīng)常生活在海邊的居民他們的經(jīng)驗(yàn)也比較豐富,更能及時(shí)活得信息,。但是在能見(jiàn)度不良或夜晚進(jìn)行搜救時(shí),,如何快速搜尋檢測(cè)遇險(xiǎn)目標(biāo),并對(duì)檢測(cè)到的目標(biāo)進(jìn)行甄別和確認(rèn)成為快速有效搜救的關(guān)鍵,?;垡暪怆娧邪l(fā)的目標(biāo)識(shí)別與跟蹤智能處理板,可實(shí)現(xiàn)對(duì)航海搜救雷達(dá)目標(biāo)進(jìn)行識(shí)別并鎖定目標(biāo)進(jìn)行跟蹤,,有助于確定搜救范圍,,可提高海上搜救行動(dòng)的速度和效率。
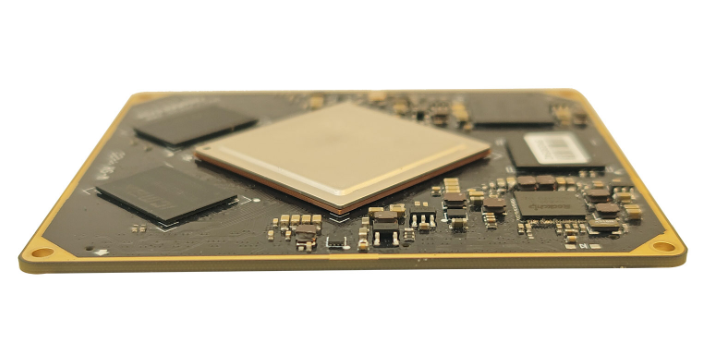
目標(biāo)遮擋是導(dǎo)致跟蹤失敗的一個(gè)重要原因,,也是實(shí)現(xiàn)長(zhǎng)程目標(biāo)跟蹤的關(guān)鍵問(wèn)題,。跟蹤任務(wù)從始至終都只跟蹤一個(gè)目標(biāo),一旦目標(biāo)被遮擋,,則會(huì)極大程度上影響跟蹤準(zhǔn)確度,,甚至導(dǎo)致跟蹤失敗。因此,,當(dāng)面臨遮擋問(wèn)題時(shí),,目標(biāo)跟蹤任務(wù)的要求更加嚴(yán)格。目前,,目標(biāo)遮擋可以分為兩種情況:部分遮擋和完全遮擋,。部分遮擋意味著在圖像中還存在部分目標(biāo),可以通過(guò)對(duì)這部分的目標(biāo)進(jìn)行判斷進(jìn)而確定目標(biāo)的位置,;完全遮擋則是在圖像中找不到目標(biāo),,可能發(fā)生在有大的物體完全遮住了跟蹤目標(biāo)?;垡暪怆姷膱D像處理板具有抗遮擋能力,?;垡暪怆婇_(kāi)發(fā)的慧視RK3588圖像處理板,,采用了國(guó)產(chǎn)高性能CPU。
隨著城市規(guī)模的不斷擴(kuò)大與城市空間管理復(fù)雜性的持續(xù)提升,,我國(guó)城市管理的方式方法也一直處在逐步演變的過(guò)程,。以道路空間管理為例,我國(guó)城市大多經(jīng)歷了由早期的只靠少量人力對(duì)城市重點(diǎn)區(qū)域或位置進(jìn)行人工監(jiān)管發(fā)展至以交通信號(hào)燈,、道路攝像頭等設(shè)備為主的后臺(tái)監(jiān)控階段,,近年來(lái)部分經(jīng)濟(jì)實(shí)力較強(qiáng)且基礎(chǔ)設(shè)施完備的大中型城市更是在傳統(tǒng)的設(shè)備監(jiān)控基礎(chǔ)上,嘗試將人工智能,、物聯(lián)網(wǎng),、大數(shù)據(jù)、云服務(wù)、5G等新一代信息技術(shù)引入到城市空間管理中,,實(shí)現(xiàn)人,、車、物的智能識(shí)別與軌跡追蹤等智慧交通能力,。淺析AI圖像視頻類智能分析芯片的選擇,!可靠目標(biāo)檢測(cè)型號(hào)
國(guó)產(chǎn)化主板生產(chǎn)商—慧視光電??焖倌繕?biāo)檢測(cè)價(jià)格信息
傳統(tǒng)的工地,,基本是靠人在監(jiān)督、管理,,監(jiān)督管理人員一旦監(jiān)督不到位就會(huì)出現(xiàn)紕漏,,引發(fā)事故隱患,因此管理人員和施工人員,、管理人員和項(xiàng)目之間不能實(shí)時(shí)有效的溝通,,導(dǎo)致管理人員難以管理項(xiàng)目和施工人員的工作情況,造成項(xiàng)目進(jìn)度慢,、人員安全難管控的問(wèn)題,。而智慧工地的建立可以有效的對(duì)工地進(jìn)行管理。下面我們重點(diǎn)介紹AI算法在智慧工地中起到的作用,。1.安全帽監(jiān)控:可以通過(guò)對(duì)監(jiān)控視頻的圖像處理,,有效的實(shí)時(shí)監(jiān)控施工人員是否配帶安全帽,如果沒(méi)有佩戴,,那么會(huì)對(duì)相關(guān)人員進(jìn)行框選,,然后在后臺(tái)報(bào)警。2.安全作業(yè)監(jiān)控:可以通過(guò)對(duì)監(jiān)控視頻的圖像處理,,對(duì)違規(guī)區(qū)域作業(yè)進(jìn)行有效監(jiān)督,。3.物資監(jiān)控與防盜:可以對(duì)進(jìn)入設(shè)定的監(jiān)控區(qū)域內(nèi)的可疑人員進(jìn)行有效的提醒,從而起到有效監(jiān)督物資,??焖倌繕?biāo)檢測(cè)價(jià)格信息
- 重慶雙向?qū)χv視頻產(chǎn)品價(jià)格合理 2025-06-14
- 甘肅倉(cāng)儲(chǔ)視頻壓縮與傳輸山區(qū) 2025-06-14
- 云南監(jiān)控視頻壓縮與傳輸供應(yīng)商 2025-06-14
- 湖北銀行視頻壓縮與傳輸 2025-06-14
- 吉林實(shí)時(shí)視頻壓縮與傳輸高清 2025-06-14
- 重慶視頻壓縮與傳輸專業(yè)方案 2025-06-14
- 貴州專業(yè)視頻壓縮與傳輸高清 2025-06-14
- 云南窄帶視頻壓縮與傳輸供應(yīng)商 2025-06-14
- 湖北物流視頻壓縮與傳輸森林 2025-06-14
- 江西窄帶多路視頻壓縮與傳輸提供商 2025-06-14
- 汕頭頭盔振子質(zhì)量 2025-06-14
- 重慶樂(lè)鑫代理廠家 2025-06-14
- 檢測(cè)塑料的接近開(kāi)關(guān) 2025-06-14
- 鎮(zhèn)江低壓線光纖通信設(shè)備是什么 2025-06-14
- 安徽短效Socks5推薦 2025-06-14
- 重慶超七類網(wǎng)線價(jià)格 2025-06-14
- 東莞國(guó)內(nèi)新型膜材料銷售廠家電話 2025-06-14
- 南京高精度防爆手機(jī)哪家好 2025-06-14
- 安防高壓電網(wǎng)企業(yè) 2025-06-14
- 北京大范圍移動(dòng)終端追蹤技術(shù) 2025-06-14