河南信息化圖像標(biāo)注技術(shù)
首先攝像機(jī)采用的是可見光高清攝像機(jī),,具備1920*1080的分辨率,系統(tǒng)視場31.11°×17.8°,,其中搜索視場15.8°×15.8°(1080P像素),。而圖像處理則采用慧視開發(fā)的RV1126高性能圖像處理板,之所以采用這塊板卡,,一方面得益于其低功耗,、微型外觀的設(shè)計(jì),非常契合“智慧眼”這樣對于空間要求嚴(yán)格的應(yīng)用場景,;另一方面RV1126具備2.0TOPS的算力,,在國產(chǎn)化方面也十分完整,安全性十足,。兩者結(jié)合,,就能夠形成重量不超過100g的“智慧眼”。在算法的作用下,,能夠達(dá)到≥50Hz的跟蹤幀率,,≥25Hz的檢測幀率,實(shí)現(xiàn)捕獲4m*4m目標(biāo)超過800m,、6m*6m目標(biāo)超過1000m,。這就是“機(jī)器狼”的智慧化措施,通過一個(gè)“小小的”“智慧眼”的加入,,便能夠讓其實(shí)現(xiàn)許多自動(dòng)化任務(wù),。隨著技術(shù)的不斷發(fā)展,,“機(jī)器狼”的形態(tài)將會(huì)不斷進(jìn)步,滿足更多多樣化需求,。AI算法提升平臺SpeedDP,。河南信息化圖像標(biāo)注技術(shù)

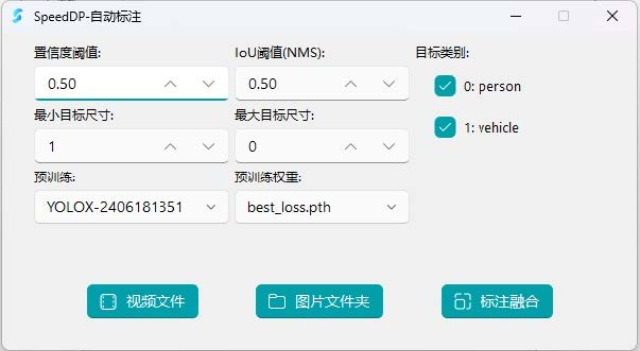
在通常情況下,工業(yè)數(shù)據(jù)是海量,、多樣的,,并且經(jīng)常充斥著錯(cuò)誤或不相關(guān)的信息,例如停機(jī)日志,。如果沒有指導(dǎo),,數(shù)據(jù)科學(xué)家通常會(huì)浪費(fèi)寶貴的時(shí)間和資源來篩選無關(guān)的復(fù)雜性,浪費(fèi)寶貴的時(shí)間,,并經(jīng)常產(chǎn)生誤導(dǎo)性的模型,。這就是為什么人工(包括工藝工程師和操作人員)在為準(zhǔn)確模型準(zhǔn)備數(shù)據(jù)方面至關(guān)重要,他們的工藝知識有助于確定正確的數(shù)據(jù)和相關(guān)時(shí)間段,。準(zhǔn)備好準(zhǔn)確的模型后,,可以采用慧視光電推出的AI自動(dòng)圖像標(biāo)注軟件SpeedDP來幫助進(jìn)行AI深度學(xué)習(xí),讓AI更加聰明,,進(jìn)而更好地進(jìn)行數(shù)據(jù)分析,,遼寧專業(yè)圖像標(biāo)注大概價(jià)格傳統(tǒng)的人工標(biāo)注效率很低。
圖像識別方法可以分為兩大類,,模型方法和搜索方法,。模型方法是在業(yè)界研究和使用比較多的方法。模型的方法是試圖通過一些已知“標(biāo)簽”的圖像,,通過機(jī)器學(xué)習(xí)的各種方法來學(xué)習(xí)一個(gè)描述這些標(biāo)簽的“模型”,,從而,對于一個(gè)新的未知圖像,,經(jīng)過這個(gè)模型判斷出其應(yīng)該具有的標(biāo)簽,。基于搜索的方法是在大數(shù)據(jù)時(shí)代才出現(xiàn)的方法,,其基礎(chǔ)是將已知標(biāo)簽的圖像數(shù)據(jù)建成一個(gè)可以進(jìn)行高效率檢索的數(shù)據(jù)庫,,稱為圖像索引。通常需要大量的圖像來建索引,,但圖像的標(biāo)簽可以有少量的噪聲,。那么,對一副待測圖像,,我們到這個(gè)數(shù)據(jù)庫中去找與其相同或者相似的若干圖像,,然后綜合這些圖像的標(biāo)簽來預(yù)測待測圖像的標(biāo)簽。
成都慧視開發(fā)的RK3588系列高性能圖像處理板Viztra-HE030,能夠在-40℃~65℃的環(huán)境中進(jìn)行工作,,用在寒冷的北方冬天電力巡檢領(lǐng)域,,可以有效支撐無人機(jī)的穩(wěn)定工作。此外,,這款板卡的存儲(chǔ)溫度范圍在-55℃~75℃,,遇到更加極端寒冷的天氣時(shí),,不使用也能夠有效抗寒,。RK3588屬于旗艦機(jī)芯片,搭載八核64位CPU,,主頻高達(dá)2.4GHz,。集成ARMMali-G610MP4四核GPU,內(nèi)置AI加速器NPU,,可提供6Tops算力,,用在電力巡檢領(lǐng)域能夠快速穩(wěn)定處理復(fù)雜的場景,幫助進(jìn)行保供電工作,。SpeedDP能夠進(jìn)行算法模型的提升,。
RK3588作為瑞芯微國產(chǎn)化旗艦級芯片,用在目標(biāo)跟蹤領(lǐng)域,,通常情況下跟蹤幀率都在50Hz左右,,這已經(jīng)足夠滿足大多數(shù)應(yīng)用領(lǐng)域的需求。但在許多特殊領(lǐng)域,,如軍備,、邊防,高幀頻的視頻輸出能夠在極短的時(shí)間內(nèi)捕捉到更多的畫面,,實(shí)現(xiàn)高速動(dòng)態(tài)場景的連續(xù)拍攝,。高幀頻的目標(biāo)跟蹤則能夠獲得更多的目標(biāo)細(xì)節(jié),便于做出下一步判斷,。許多中低端性能的由于算力等因素?zé)o法達(dá)到這樣的需求,,但RK3588作為性能怪,6.0TOPS的算力開發(fā)潛力無限,。成都慧視就針對于這樣的需求場景,,在硬件的支持下,定制開發(fā)出能夠支撐100Hz跟蹤算法,,從而打造出能夠穩(wěn)定實(shí)現(xiàn)100Hz目標(biāo)跟蹤的整合方案,。圖像算法工程師的工具利器。廣東高效圖像標(biāo)注
SpeedDP是一個(gè)基于瑞芯微的深度學(xué)習(xí)算法開發(fā)平臺,。河南信息化圖像標(biāo)注技術(shù)
無人機(jī)在農(nóng)業(yè)領(lǐng)域能夠?qū)崿F(xiàn)高效率的施肥,、播種等操作。但是不同的作業(yè)環(huán)境對于無人機(jī)的工作性能要求不一樣,同樣的方案在平原地區(qū)適用,,在高原地區(qū)就不行,。因此針對于特殊作業(yè)環(huán)境需要制定不同的智慧化方案。像青藏高原這樣地貌復(fù)雜,、低氣壓,、大溫差的特點(diǎn),參與智能化工作的各個(gè)部件需要符合這樣作業(yè)環(huán)境特點(diǎn)的性能要求,。不比平原的一馬平川,,高原由于環(huán)境復(fù)雜,地形起伏對于無人機(jī)的飛行也需要進(jìn)行控制,,無論是高度還是速度甚至距離都需要進(jìn)行嚴(yán)格限制,,防止出現(xiàn)撞機(jī)等事故。因此,,這個(gè)方面的智慧化建設(shè)就需要無人機(jī)具備智能避障的功能,,無人機(jī)需要在高速度或者遠(yuǎn)距離的情況下識別樹木、電線桿,、石頭等障礙物,,并能夠?qū)崿F(xiàn)避障。河南信息化圖像標(biāo)注技術(shù)
- 安徽智慧工地AI智能安全帽識別 2025-06-06
- 云南圖像處理板工程 2025-06-06
- 湖北圖像處理板類型 2025-06-06
- 陜西國產(chǎn)目標(biāo)識別遠(yuǎn)程控制 2025-06-06
- 貴州圖像處理板進(jìn)貨價(jià) 2025-06-05
- 重慶快速圖像標(biāo)注優(yōu)勢 2025-06-05
- 內(nèi)蒙古移動(dòng)目標(biāo)識別定制 2025-06-05
- 吉林智慧養(yǎng)老AI智能供應(yīng)商 2025-06-05
- 四川算法定制AI智能煙霧識別 2025-06-05
- 質(zhì)量圖像處理板功能 2025-06-05
- 河北監(jiān)獄高壓電網(wǎng) 2025-06-06
- 遼寧高精度時(shí)頻綜合測試裝置 2025-06-06
- 安徽智慧工地AI智能安全帽識別 2025-06-06
- 云南圖像處理板工程 2025-06-06
- optical waveguide銷售 2025-06-06
- 南京智能化智慧園區(qū)網(wǎng)絡(luò)覆蓋設(shè)備設(shè)計(jì) 2025-06-06
- 新吳區(qū)智能化光通信設(shè)備廠家報(bào)價(jià) 2025-06-06
- 什么是接近式傳感器 2025-06-06
- 遼寧DAC高速電纜刀片網(wǎng)絡(luò)Blade Network 2025-06-06
- 錫山區(qū)智能化光通信設(shè)備優(yōu)勢 2025-06-06