-
掘進(jìn)機(jī)常見故障分析及處理方法
-
懸臂式掘進(jìn)機(jī)與全斷面掘進(jìn)機(jī)的區(qū)別
-
正確使用采煤機(jī)截齒及其重要性
-
掘進(jìn)機(jī)截齒:礦山開采的鋒銳利器
-
掘進(jìn)機(jī)的多樣類型與廣闊市場(chǎng)前景
-
怎么樣對(duì)掘進(jìn)機(jī)截割減速機(jī)進(jìn)行潤(rùn)滑呢?
-
哪些因素會(huì)影響懸臂式掘進(jìn)機(jī)配件的性能?
-
懸臂式掘進(jìn)機(jī)常見型號(hào)
-
懸臂式掘進(jìn)機(jī)的相關(guān)介紹及發(fā)展現(xiàn)狀
-
掘錨機(jī)配件的檢修及維護(hù)
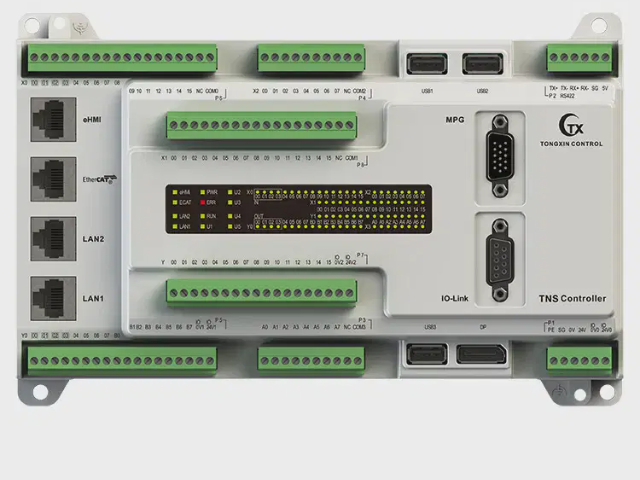
深圳PLC同芯系列控制器
硬件連接:電源連接:根據(jù)運(yùn)動(dòng)控制器的電源要求,,將其連接到合適的電源上。確保電源的穩(wěn)定性和可靠性,。電機(jī)連接:將運(yùn)動(dòng)控制器與電機(jī)進(jìn)行連接,。根據(jù)電機(jī)的類型(如步進(jìn)電機(jī)、伺服電機(jī)等),,使用相應(yīng)的電纜和接口進(jìn)行連接,。確保連接牢固,避免松動(dòng)或接觸不良,。傳感器連接:如果需要使用傳感器來(lái)反饋運(yùn)動(dòng)狀態(tài)或位置信息,,將傳感器與運(yùn)動(dòng)控制器進(jìn)行連接。常見的傳感器包括編碼器,、限位開關(guān),、接近開關(guān)等。根據(jù)傳感器的類型和接口,,選擇合適的連接方式,。其他設(shè)備連接:根據(jù)實(shí)際需求,將運(yùn)動(dòng)控制器與其他設(shè)備(如 PLC、觸摸屏,、計(jì)算機(jī)等)進(jìn)行連接,,以實(shí)現(xiàn)數(shù)據(jù)交換和控制。具備自學(xué)習(xí)能力的運(yùn)動(dòng)控制器,,快速適配新任務(wù),,減少調(diào)試時(shí)間,生產(chǎn)靈活又高效,。深圳PLC同芯系列控制器
先進(jìn)控制策略應(yīng)用:除了傳統(tǒng)的 PID 控制算法,,研究和應(yīng)用更多先進(jìn)的控制策略,如模糊控制,、神經(jīng)網(wǎng)絡(luò)控制,、自適應(yīng)控制等。這些算法能夠更好地處理系統(tǒng)的非線性,、不確定性和時(shí)變性,,提高運(yùn)動(dòng)控制器的控制精度和動(dòng)態(tài)性能。在機(jī)器人控制中,,采用神經(jīng)網(wǎng)絡(luò)控制算法可以使機(jī)器人更好地適應(yīng)復(fù)雜的環(huán)境和任務(wù)要求,,實(shí)現(xiàn)更靈活、精細(xì)的運(yùn)動(dòng),。多軸協(xié)同控制算法優(yōu)化:隨著多軸運(yùn)動(dòng)控制需求的增加,,優(yōu)化多軸協(xié)同控制算法是關(guān)鍵。通過(guò)研發(fā)更高效的同步控制算法,,減少多軸之間的運(yùn)動(dòng)誤差和耦合干擾,,實(shí)現(xiàn)多軸的高精度同步運(yùn)動(dòng)。在數(shù)控機(jī)床的多軸聯(lián)動(dòng)加工中,,精確的多軸協(xié)同控制可以提高加工效率和產(chǎn)品質(zhì)量,。深圳同芯運(yùn)動(dòng)控制器好不好運(yùn)動(dòng)控制器精確指揮機(jī)械運(yùn)動(dòng),如工業(yè)機(jī)器人在其操控下,,靈活抓取物件,,助力高效生產(chǎn)。

光伏設(shè)備制造:在太陽(yáng)能電池片的生產(chǎn)過(guò)程中,,國(guó)產(chǎn)運(yùn)動(dòng)控制器用于控制硅片切割設(shè)備,、鍍膜設(shè)備等的運(yùn)動(dòng),確保切割精度和鍍膜均勻性,。在光伏組件的組裝環(huán)節(jié),,也能控制機(jī)器人完成電池片的焊接、封裝等操作,。鋰電池生產(chǎn):在鋰電池的制造過(guò)程中,,涉及電極涂布,、卷繞、組裝等多個(gè)工序,,國(guó)產(chǎn)運(yùn)動(dòng)控制器可精確控制各工序設(shè)備的運(yùn)動(dòng),,保證鋰電池的生產(chǎn)質(zhì)量和一致性。
康復(fù)設(shè)備:在康復(fù)運(yùn)轉(zhuǎn)中使用的康復(fù)機(jī)器人,、按摩椅等設(shè)備,,國(guó)產(chǎn)運(yùn)動(dòng)控制器可根據(jù)患者的情況精確控制設(shè)備的運(yùn)動(dòng)幅度、力度和速度,,為患者提供個(gè)性化的康復(fù)運(yùn)轉(zhuǎn)方案,。醫(yī)療檢測(cè)設(shè)備:如 CT 掃描儀、X 光機(jī)等醫(yī)療檢測(cè)設(shè)備,,運(yùn)動(dòng)控制器控制掃描床的移動(dòng)和設(shè)備的旋轉(zhuǎn)等動(dòng)作,,確保檢測(cè)的準(zhǔn)確性和穩(wěn)定性。
與上位機(jī)通信:運(yùn)動(dòng)控制器可以與 PLC,、工控機(jī)等上位機(jī)進(jìn)行通信,,接收上位機(jī)的指令并上傳設(shè)備的運(yùn)行狀態(tài)信息。在自動(dòng)化工廠的控制系統(tǒng)中,,上位機(jī)可以通過(guò)運(yùn)動(dòng)控制器對(duì)多個(gè)設(shè)備進(jìn)行集中管理和控制,,實(shí)現(xiàn)整個(gè)生產(chǎn)過(guò)程的自動(dòng)化和信息化。與其他設(shè)備協(xié)同工作:能夠與傳感器,、執(zhí)行器等其他設(shè)備進(jìn)行集成,共同構(gòu)成一個(gè)完整的自動(dòng)化系統(tǒng),。在智能倉(cāng)儲(chǔ)物流系統(tǒng)中,,運(yùn)動(dòng)控制器控制堆垛機(jī)的運(yùn)動(dòng),同時(shí)與激光傳感器,、條形碼閱讀器等設(shè)備協(xié)同工作,,實(shí)現(xiàn)貨物的自動(dòng)存儲(chǔ)和檢索。先進(jìn)的運(yùn)動(dòng)控制器賦予工業(yè)機(jī)器人敏捷身手,,高效完成搬運(yùn),、焊接等各類操作。

信號(hào)輸入指令信號(hào):操作人員或上位機(jī)(如PLC,、工控機(jī)等)會(huì)向運(yùn)動(dòng)控制器發(fā)送指令信號(hào),,這些指令包含了期望的運(yùn)動(dòng)參數(shù),如目標(biāo)位置,、速度,、加速度等。例如在數(shù)控機(jī)床中,,操作人員通過(guò)編程設(shè)定刀具的移動(dòng)位置和速度,,這些信息會(huì)作為指令信號(hào)傳輸給運(yùn)動(dòng)控制器,。反饋信號(hào):電機(jī)通常會(huì)配備各種傳感器(如編碼器、霍爾傳感器等),,用于實(shí)時(shí)監(jiān)測(cè)電機(jī)的實(shí)際運(yùn)行狀態(tài),,如電機(jī)的轉(zhuǎn)速、位置,、轉(zhuǎn)矩等,。傳感器將這些物理量轉(zhuǎn)換為電信號(hào)反饋給運(yùn)動(dòng)控制器。以編碼器為例,,它可以將電機(jī)的旋轉(zhuǎn)角度轉(zhuǎn)換為脈沖信號(hào),,運(yùn)動(dòng)控制器通過(guò)計(jì)數(shù)脈沖數(shù)量和頻率來(lái)確定電機(jī)的位置和速度。運(yùn)動(dòng)控制器支持多模式切換,,能在點(diǎn)位,、連續(xù)軌跡控制間靈活轉(zhuǎn)換,滿足多樣生產(chǎn)需求,。深圳運(yùn)動(dòng)控制器
同芯運(yùn)動(dòng)控制器抗干擾性強(qiáng),,在復(fù)雜電磁環(huán)境下精確控位,確保設(shè)備穩(wěn)定運(yùn)行,,減少故障停機(jī),。深圳PLC同芯系列控制器
信號(hào)處理算法運(yùn)算:運(yùn)動(dòng)控制器接收到指令信號(hào)和反饋信號(hào)后,會(huì)根據(jù)內(nèi)置的控制算法進(jìn)行運(yùn)算,。常見的控制算法有PID(比例-積分-微分)控制算法,,它會(huì)比較指令信號(hào)和反饋信號(hào)之間的偏差,然后根據(jù)比例,、積分和微分三個(gè)環(huán)節(jié)的計(jì)算結(jié)果,,輸出一個(gè)控制量,用于調(diào)整電機(jī)的運(yùn)行狀態(tài),,使偏差逐漸減小,,模塊終實(shí)現(xiàn)電機(jī)的精確控制。軌跡規(guī)劃:如果需要電機(jī)按照特定的軌跡運(yùn)動(dòng),,運(yùn)動(dòng)控制器還會(huì)進(jìn)行軌跡規(guī)劃,。它會(huì)根據(jù)目標(biāo)位置和運(yùn)動(dòng)約束條件,計(jì)算出電機(jī)在每個(gè)時(shí)刻應(yīng)該達(dá)到的位置,、速度和加速度,,并生成相應(yīng)的控制指令。例如在機(jī)器人的運(yùn)動(dòng)控制中,,運(yùn)動(dòng)控制器需要根據(jù)機(jī)器人的運(yùn)動(dòng)路徑,,規(guī)劃出每個(gè)關(guān)節(jié)電機(jī)的運(yùn)動(dòng)軌跡。深圳PLC同芯系列控制器
深圳市同芯智控技術(shù)有限公司是一家有著先進(jìn)的發(fā)展理念,,先進(jìn)的管理經(jīng)驗(yàn),,在發(fā)展過(guò)程中不斷完善自己,,要求自己,不斷創(chuàng)新,,時(shí)刻準(zhǔn)備著迎接更多挑戰(zhàn)的活力公司,,在廣東省等地區(qū)的機(jī)械及行業(yè)設(shè)備中匯聚了大量的人脈以及**,在業(yè)界也收獲了很多良好的評(píng)價(jià),,這些都源自于自身的努力和大家共同進(jìn)步的結(jié)果,,這些評(píng)價(jià)對(duì)我們而言是比較好的前進(jìn)動(dòng)力,也促使我們?cè)谝院蟮牡缆飞媳3謯^發(fā)圖強(qiáng),、一往無(wú)前的進(jìn)取創(chuàng)新精神,,努力把公司發(fā)展戰(zhàn)略推向一個(gè)新高度,在全體員工共同努力之下,,全力拼搏將共同深圳市同芯智控技術(shù)供應(yīng)和您一起攜手走向更好的未來(lái),,創(chuàng)造更有價(jià)值的產(chǎn)品,我們將以更好的狀態(tài),,更認(rèn)真的態(tài)度,,更飽滿的精力去創(chuàng)造,去拼搏,,去努力,,讓我們一起更好更快的成長(zhǎng)!
- 16軸運(yùn)動(dòng)控制器 2025-05-31
- plc是如何控制變頻器的 2025-05-31
- plc集中控制 2025-05-31
- 深圳運(yùn)動(dòng)控制卡與運(yùn)動(dòng)控制器驅(qū)動(dòng)器 2025-05-30
- 深圳PLC同芯系列控制器廠家 2025-05-30
- 控制自動(dòng)化plc 2025-05-30
- 廣東自動(dòng)化系列運(yùn)動(dòng)控制器好不好 2025-05-30
- plc監(jiān)控系統(tǒng) plc 2025-05-30
- plc控制器一體機(jī) 2025-05-30
- 基于plc的智能窗簾控制系統(tǒng) 2025-05-30
- 旋耕機(jī)焊接機(jī)器人簡(jiǎn)易設(shè)備 2025-06-15
- 貴州全自動(dòng)化共晶機(jī)廠家 2025-06-15
- 常德皮革激光打標(biāo)機(jī)價(jià)格 2025-06-15
- 機(jī)床檢棒BBT30 2025-06-15
- 虹口區(qū)智能倉(cāng)儲(chǔ)管理系統(tǒng)產(chǎn)業(yè) 2025-06-15
- 不銹鋼風(fēng)機(jī)咨詢電話 2025-06-15
- 南消消防閘閥門 2025-06-15
- 汕尾潤(rùn)東方環(huán)??照{(diào)廠家直銷 2025-06-15
- 大規(guī)模鼓風(fēng)機(jī)產(chǎn)品介紹 2025-06-15
- 山東家電行業(yè)臥式注塑機(jī)零售 2025-06-15