替代電缸哪個好
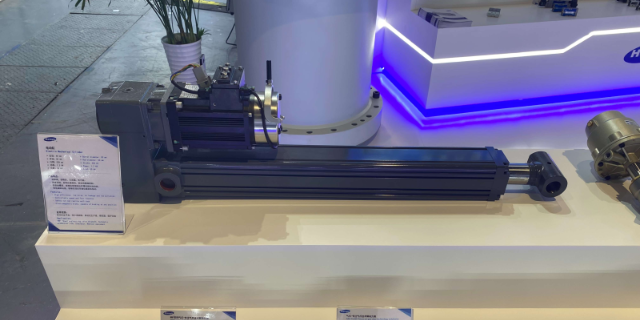
電動缸(線性驅(qū)動執(zhí)行器)是一款電機與傳動絲杠一體化設(shè)計的模塊化產(chǎn)品,,通過絲杠螺母副將電機的旋轉(zhuǎn)運動轉(zhuǎn)換為精確可控的往復(fù)直線運動,。同時,,電動缸具有良好的耐化學(xué)腐蝕性能,、完美的密封性和較高的IP防護等級。即使在惡劣的環(huán)境下工作,,也能保證較長的使用壽命和良好的動態(tài)性能,,使其成為氣動和一些低壓液壓產(chǎn)品的完美替代品。由于其效率高,、負(fù)載大,、速度快,、運動精確可控,廣泛應(yīng)用于航空航天測試,、多自由度仿真/動態(tài)娛樂/精密加工,、機器人、汽車制造設(shè)備,、鋼鐵鑄造石油化工,、物料搬運、注塑機,、模具控制,、閥門控制、精密機床,、制藥機械食品加工等領(lǐng)域。隨著環(huán)保法規(guī)的日益嚴(yán)格,,人們的環(huán)保意識逐漸提高,,對工程機械的要求也越來越高,而電動缸低噪音,、無泄漏,、高效率、低污染的優(yōu)勢正好彌補了這一點需求,。因此,,一些工程機械的傳動載體正在逐步發(fā)展為電動缸驅(qū)動。 電缸的維護周期較長,,減少了維護工作量,。替代電缸哪個好
電缸
電缸的優(yōu)點:精度高:電缸能夠準(zhǔn)確地控制位置、速度等參數(shù),,可以實現(xiàn)高精度的定位和運動控制,。速度快:電缸的驅(qū)動系統(tǒng)為電動機,其轉(zhuǎn)速可以很高,,因此電缸的運動速度較快,。無污染:由于電缸的驅(qū)動系統(tǒng)為電動機,不需要潤滑油,,因此電缸運動時不會產(chǎn)生潤滑油污染,。易于控制:通過控制電源開關(guān)、電機控制器等電子元器件,,可以實現(xiàn)對電缸的位置,、速度等參數(shù)的精確控制。系統(tǒng)構(gòu)成簡單:由于電機通常與缸體集成在一起,,再加上控制器與電纜,,電缸的整個系統(tǒng)就是由這三部分組成的,,簡單而緊湊。停止的位置數(shù)多且控制精度高:低端產(chǎn)品的停止位置有3,、5,、16、64個等,,產(chǎn)品則可以達到幾百甚至上千個位置,。在精度方面,電缸也具有優(yōu)勢,,定位精度可達,。柔韌性好:由于控制器可以與PLC直接進行連接,對電機的轉(zhuǎn)速,、定位和正反轉(zhuǎn)都能夠?qū)崿F(xiàn)精確控制,,在一定程度上,電缸可以根據(jù)需要隨意進行運動,。 安沃馳電缸定義電缸的防護設(shè)計考慮了防塵和防水功能,。
電缸的精度實現(xiàn)涉及到多個方面,包括機械設(shè)計,、控制系統(tǒng),、驅(qū)動器、傳感器等,。以下是一些實現(xiàn)電缸高精度的關(guān)鍵因素:機械設(shè)計:電缸的機械設(shè)計是實現(xiàn)高精度的關(guān)鍵,。在設(shè)計中,需要考慮到導(dǎo)軌,、軸承,、絲杠等部件的精度和剛度,以及各部件之間的裝配精度,。同時,,需要合理設(shè)計電缸的結(jié)構(gòu),以減小熱變形和振動對精度的影響,??刂葡到y(tǒng):控制系統(tǒng)是實現(xiàn)電缸高精度的要點??刂葡到y(tǒng)需要能夠精確控制電機的運動,,包括速度、位置和推力等,。同時,,控制系統(tǒng)還需要能夠?qū)崟r處理傳感器反饋的數(shù)據(jù),對電缸的位置和速度進行實時調(diào)整,以保證高精度運行,。驅(qū)動器:驅(qū)動器是實現(xiàn)電缸高精度的關(guān)鍵部件,。選擇高精度的伺服驅(qū)動器和控制器是保證電缸高精度運行的關(guān)鍵。伺服驅(qū)動器和控制器能夠精確控制電機的運動,,從而實現(xiàn)高精度的位置和速度控制,。傳感器:傳感器是實現(xiàn)電缸高精度的重要部件。傳感器能夠?qū)崟r監(jiān)測電缸的位置和速度,,并將數(shù)據(jù)反饋給控制系統(tǒng),。選擇高精度的傳感器和編碼器是保證電缸高精度運行的重要措施。裝配和調(diào)試:裝配和調(diào)試也是實現(xiàn)電缸高精度的重要環(huán)節(jié),。在裝配過程中,,需要保證各部件之間的裝配精度,以減小誤差,。在調(diào)試過程中,,需要對電缸的運動參數(shù)進行精確調(diào)整。
液壓缸,、氣缸和電缸各有優(yōu)缺點,,適用于不同的應(yīng)用場景。液壓缸適用于大負(fù)載,、高剛度和高精度的直線運動控制,具有輸出力矩大,、穩(wěn)定性和可靠性高等優(yōu)點,,但需要定期維護,控制精度有限,。氣缸結(jié)構(gòu)簡單,、成本低、適應(yīng)性強,,但輸出力矩小,,控制精度和穩(wěn)定性有限。電缸控制精度高,、響應(yīng)速度快,、適用于各種環(huán)境條件,但成本較高,,需要定期維護,。在實際應(yīng)用中,應(yīng)根據(jù)具體需求和場景選擇合適的傳動和控制方式,。隨著工業(yè)自動化和智能制造的發(fā)展,,電缸的應(yīng)用前景將更加廣闊,其高精度、高速,、大負(fù)載等優(yōu)點將得到更廣泛的應(yīng)用,。未來,隨著技術(shù)的不斷進步和應(yīng)用需求的不斷提高,,液壓缸,、氣缸和電缸將會不斷創(chuàng)新和完善,更好地服務(wù)于工業(yè)自動化和智能制造領(lǐng)域,。 電缸的電源連接方式靈活多樣,,方便集成。
工業(yè)機器人中,,電缸通過其機械結(jié)構(gòu)和電動機系統(tǒng)共同實現(xiàn)線性運動控制,。具體來說,電缸的線性運動控制過程如下:控制器:工業(yè)機器人的控制器根據(jù)編程指令和反饋信息計算出機器人所需的運動軌跡和馬達控制信號,,以確保機器人按照指定的軌跡和速度進行線性運動,。伺服馬達:伺服馬達是電缸的重要驅(qū)動組件,能夠?qū)㈦娔苻D(zhuǎn)化為機械能,。通過控制器發(fā)出的指令,,伺服馬達驅(qū)動電缸進行線性運動。編碼器:編碼器用于反饋電機的實時位置信息,,控制器根據(jù)編碼器的反饋信息計算出機器人實際位置與目標(biāo)位置的偏差,,并調(diào)整控制信號以糾正偏差,實現(xiàn)閉環(huán)控制,。傳動機構(gòu):傳動機構(gòu)包括齒輪箱和滑塊等部件,,用于將伺服馬達的轉(zhuǎn)速轉(zhuǎn)化為電缸所需的扭矩,并將扭矩傳遞到滑塊上,,推動滑塊在導(dǎo)軌上做線性運動,。導(dǎo)軌:導(dǎo)軌是電缸的支撐和導(dǎo)向部件,確?;瑝K沿指定軌跡進行線性運動,。導(dǎo)軌通常由精密的鋼制零件制成,以確保高精度和長壽命,?;瑝K:滑塊是電缸的執(zhí)行部件,由具有低摩擦和高耐磨性的材料制成,,如高分子材料和金屬等,。滑塊與導(dǎo)軌的配合實現(xiàn)了電缸的線性運動,。綜上所述,,工業(yè)機器人中的電缸通過其機械結(jié)構(gòu)和電動機系統(tǒng)的協(xié)同作用,實現(xiàn)了精確的線性運動控制。 電缸被應(yīng)用于制藥設(shè)備的灌裝和封口操作,。福建skf電缸
電缸的推力輸出線性度好,,減少了誤差。替代電缸哪個好
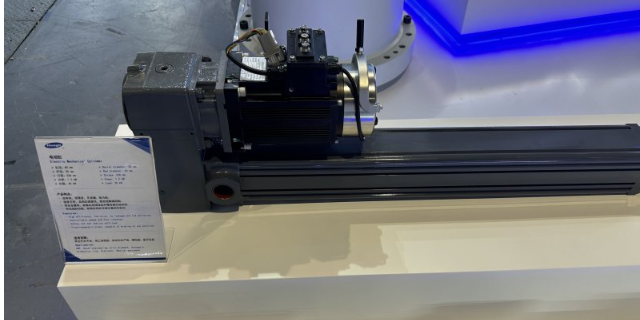
伺服電缸的模塊化主要體現(xiàn)在其設(shè)計上,,將伺服電機與絲杠一體化,,使得產(chǎn)品更加緊湊和模塊化,方便用戶根據(jù)實際需求進行選擇和配置,。這種模塊化的設(shè)計方式可以提高設(shè)備的可維護性和可擴展性,,降低用戶的維護成本和使用成本。而伺服電缸的智能化主要體現(xiàn)在其控制系統(tǒng)上,,采用先進的控制算法和傳感器技術(shù),,實現(xiàn)對電缸的精確控制和智能監(jiān)控。例如,,通過集成傳感器和執(zhí)行器,,伺服電缸可以自感知、自適應(yīng),、自調(diào)整等功能,,提高其智能化水平和適應(yīng)性。這種智能化的控制方式可以提高設(shè)備的自動化程度和生產(chǎn)效率,,降低人工操作成本和誤差,。綜上所述,伺服電缸的模塊化和智能化是相輔相成的,,模塊化設(shè)計使得伺服電缸更加緊湊和易于配置,,而智能化控制則提高了設(shè)備的自動化程度和生產(chǎn)效率。未來,,隨著技術(shù)的不斷進步和應(yīng)用需求的不斷提高,伺服電缸的模塊化和智能化水平將進一步提升,,為用戶提供更加高效,、可靠的解決方案。 替代電缸哪個好
- Norgren減壓閥氣源處理技術(shù)參數(shù) 2025-06-12
- 上海閥島元件 2025-06-12
- EMC過濾器氣源處理技術(shù)參數(shù) 2025-06-12
- 替代閥島 2025-06-12
- SMCIR2000系列氣源處理型號怎么選擇 2025-06-12
- MXH氣缸附件Y型接頭 2025-06-12
- 進口氣缸附件直角雙耳環(huán)支座 2025-06-12
- 雙軸氣缸附件Y型接頭 2025-06-12
- 氣立可氣源處理工作原理 2025-06-12
- Parker三聯(lián)件氣源處理技術(shù)參數(shù) 2025-06-12
- 重慶馬卡龍面糊上料機價格 2025-06-12
- 青島不銹鋼生活水箱多少錢 2025-06-12
- 貴州臺式蒸汽空氣混合滅菌價格 2025-06-12
- 鎮(zhèn)江保溫儲罐報價 2025-06-12
- 中國香港電機變速 2025-06-12
- 南京龍門銑床 2025-06-12
- 電腦屏幕vericode怎么讀 2025-06-12
- 遼寧智能柜體生產(chǎn)線批量定制 2025-06-12
- 淮安市撬裝式試壓控制系統(tǒng)貨源廠家 2025-06-12
- 阜寧附近哪里有道路普通貨物運輸 2025-06-12