進(jìn)口氣動(dòng)執(zhí)行器控制器
電動(dòng)執(zhí)行機(jī)構(gòu)的開關(guān)時(shí)間與行程也是不容忽視的技術(shù)參數(shù)。對于角行程執(zhí)行機(jī)構(gòu)而言,,90°回轉(zhuǎn)時(shí)間是一個(gè)重要的指標(biāo),。這就如同一個(gè)旋轉(zhuǎn)的機(jī)械臂,從起始位置旋轉(zhuǎn)到90°的目標(biāo)位置所需要的時(shí)間,,直接影響到整個(gè)系統(tǒng)的工作效率。而直行程閥門的全行程時(shí)間則需要通過閥桿螺距和轉(zhuǎn)速來計(jì)算,。這就好比一個(gè)沿著直線軌道移動(dòng)的物體,,它的移動(dòng)速度取決于軌道的螺距和自身的轉(zhuǎn)速,這些因素共同決定了它從起點(diǎn)到達(dá)終點(diǎn)所需要的時(shí)間,。 選型時(shí)需要結(jié)合工藝系統(tǒng)上的技術(shù)要求,,確定電動(dòng)執(zhí)行機(jī)構(gòu)的開關(guān)時(shí)間。對于腐蝕性環(huán)境下的使用,,應(yīng)選擇具有防腐蝕涂層或材質(zhì)的電動(dòng)執(zhí)行機(jī)構(gòu)產(chǎn)品,。進(jìn)口氣動(dòng)執(zhí)行器控制器
伺服放大器作為電動(dòng)執(zhí)行機(jī)構(gòu)的關(guān)鍵控制單元,具體工作流程可分為三個(gè)關(guān)鍵階段:信號(hào)綜合與偏差檢測:系統(tǒng)接收來自DCS或調(diào)節(jié)器的標(biāo)準(zhǔn)信號(hào)(4-20mA DC)后,,前置磁放大器將輸入信號(hào)與執(zhí)行機(jī)構(gòu)的位置反饋信號(hào)進(jìn)行綜合比較,。磁放大器內(nèi)部采用四組坡莫合金環(huán)結(jié)構(gòu),,通過偏移繞組和反饋繞組實(shí)現(xiàn)信號(hào)疊加,產(chǎn)生與偏差成比例的電壓信號(hào),。功率放大與驅(qū)動(dòng)控制:當(dāng)檢測到偏差時(shí),,觸發(fā)電路將偏差信號(hào)轉(zhuǎn)換為晶閘管的觸發(fā)脈沖。正偏差觸發(fā)固態(tài)繼電器導(dǎo)通,,驅(qū)動(dòng)電機(jī)正轉(zhuǎn),;負(fù)偏差則觸發(fā)反向回路,電機(jī)反轉(zhuǎn),。新型伺服放大器采用過零觸發(fā)固態(tài)繼電器技術(shù),,既能輸出高達(dá)150VA的驅(qū)動(dòng)功率,又避免了電網(wǎng)污染,。閉環(huán)動(dòng)態(tài)調(diào)節(jié):執(zhí)行機(jī)構(gòu)動(dòng)作時(shí),,位置發(fā)送器實(shí)時(shí)將閥位轉(zhuǎn)換為電阻或電流信號(hào)反饋至輸入端。當(dāng)反饋信號(hào)與輸入信號(hào)的差值小于死區(qū)閾值(通?!?%)時(shí),,觸發(fā)電路停止輸出,電機(jī)進(jìn)入制動(dòng)狀態(tài),。這種PID調(diào)節(jié)機(jī)制可使定位精度達(dá)到±0.5% FS,,重復(fù)誤差不超過±0.1%。石油執(zhí)行機(jī)構(gòu)原理為了應(yīng)對突發(fā)狀況,,電動(dòng)執(zhí)行機(jī)構(gòu)配備了緊急停止按鈕,,可在必要時(shí)迅速切斷電源。

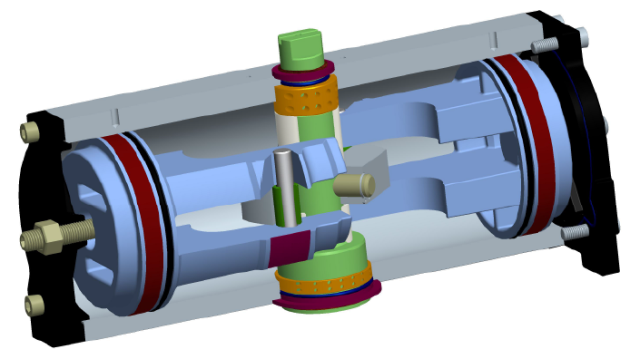
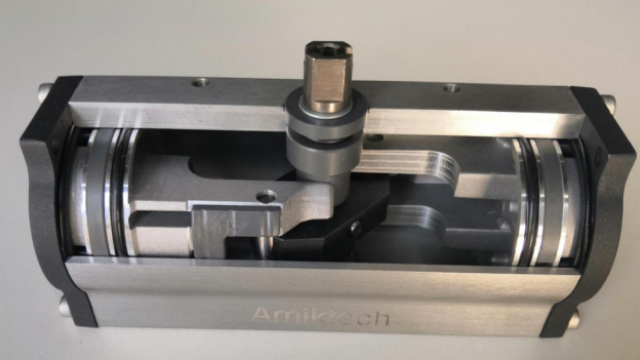
撥叉式氣動(dòng)執(zhí)行機(jī)構(gòu)的使用需要保證氣源系統(tǒng)正常供應(yīng),。氣源質(zhì)量保證:確保提供給氣動(dòng)撥叉式執(zhí)行器的壓縮空氣干凈,、干燥、無油,??砂惭b空氣過濾器、干燥器等氣源處理設(shè)備,,定期檢查和更換過濾器濾芯,,防止雜質(zhì)和水分進(jìn)入執(zhí)行器,導(dǎo)致部件腐蝕,、堵塞或損壞,。氣源壓力監(jiān)測:定期檢查氣源壓力是否在規(guī)定范圍內(nèi),一般氣動(dòng)撥叉式執(zhí)行器的工作壓力為 0.4-0.6MPa,。如果氣源壓力過高或過低,,可能會(huì)影響執(zhí)行器的性能和壽命,甚至導(dǎo)致故障,??赏ㄟ^安裝壓力表來監(jiān)測氣源壓力,,并根據(jù)需要進(jìn)行調(diào)整。
電動(dòng)執(zhí)行機(jī)構(gòu)的動(dòng)力系統(tǒng)采用三相或單相交流電機(jī)驅(qū)動(dòng),,其工作原理基于電磁感應(yīng)原理,,定子繞組通過交變電流產(chǎn)生旋轉(zhuǎn)磁場帶動(dòng)轉(zhuǎn)子輸出機(jī)械能。減速器作為關(guān)鍵傳動(dòng)部件,,主要分為行星齒輪和蝸輪蝸桿兩種形式:行星齒輪減速器通過多級行星輪系實(shí)現(xiàn)高精度分流傳動(dòng),,特別適用于大扭矩輸出場景;蝸輪蝸桿結(jié)構(gòu)則利用斜齒嚙合特性,,可達(dá)到50:1以上的減速比,,同時(shí)具備自鎖功能防止反轉(zhuǎn)。減速機(jī)構(gòu)內(nèi)部通過渦輪蝸桿組將電機(jī)的高速旋轉(zhuǎn)轉(zhuǎn)換為低速高扭矩輸出,,配合絲桿螺母機(jī)構(gòu)進(jìn)一步將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)化為直線位移(直行程),,或通過扇形齒輪組實(shí)現(xiàn)0-90°角度旋轉(zhuǎn)(角行程)。不同閥門類型對應(yīng)不同傳動(dòng)結(jié)構(gòu):閘閥,、截止閥等需要多回轉(zhuǎn)運(yùn)動(dòng)(通常900°-1800°)的閥門采用蝸輪蝸桿減速系統(tǒng),,而球閥、蝶閥等只需部分回轉(zhuǎn)(90°-120°)的閥門則配備行星齒輪系統(tǒng),。通過定期校準(zhǔn)傳感器和其他關(guān)鍵部件,,可以維持電動(dòng)執(zhí)行機(jī)構(gòu)的優(yōu)異性能表現(xiàn)。
角行程的閥門,,如蝶閥和球閥,,它們的工作原理決定了其動(dòng)作是在90°范圍內(nèi)進(jìn)行回轉(zhuǎn)。因此,,適用的是90°回轉(zhuǎn)執(zhí)行機(jī)構(gòu),。在實(shí)際應(yīng)用中,這類執(zhí)行器的輸出扭矩范圍通常在50 - 3500N·m之間,。這一扭矩范圍是根據(jù)蝶閥和球閥在不同工況下的操作需求確定的,。例如,在一些小型的水處理系統(tǒng)中,,蝶閥可能只需要較小的扭矩就能正常開啟和關(guān)閉,,而在一些大型的化工流體傳輸管道中,球閥由于需要克服較大的流體壓力和摩擦力,,就需要更大的扭矩來確??煽康牟僮?。隨著物聯(lián)網(wǎng)技術(shù)的進(jìn)步,未來電動(dòng)執(zhí)行機(jī)構(gòu)有望實(shí)現(xiàn)更加智能化的操作體驗(yàn),。石化分體式執(zhí)行器模塊
撥叉式氣動(dòng)執(zhí)行機(jī)構(gòu)配合行程限位器和位置傳感器,,可以實(shí)現(xiàn)對閥門開度的精確調(diào)節(jié),。進(jìn)口氣動(dòng)執(zhí)行器控制器
電動(dòng)執(zhí)行機(jī)構(gòu)作為機(jī)電一體化領(lǐng)域的關(guān)鍵執(zhí)行設(shè)備,其關(guān)鍵功能在于將電能轉(zhuǎn)化為機(jī)械能,,通過驅(qū)動(dòng)閥門,、擋板等裝置實(shí)現(xiàn)工業(yè)流程的精確控制。這類設(shè)備由電動(dòng)機(jī),、減速機(jī)構(gòu),、控制單元和位置傳感器四大關(guān)鍵組件構(gòu)成:電動(dòng)機(jī)作為動(dòng)力源,通常采用交流或直流電機(jī),,通過電磁感應(yīng)原理實(shí)現(xiàn)電能向旋轉(zhuǎn)機(jī)械能的轉(zhuǎn)換,;減速機(jī)構(gòu)則將電機(jī)的高轉(zhuǎn)速、低扭矩輸出轉(zhuǎn)化為低轉(zhuǎn)速,、高扭矩,,適配閘閥、球閥等不同負(fù)載需求,;控制單元集成PID算法和智能診斷模塊,,可接收4-20mA信號(hào)或數(shù)字指令,實(shí)現(xiàn)位置閉環(huán),、速度閉環(huán)及力矩保護(hù),;位置傳感器則通過編碼器或差動(dòng)變壓器實(shí)時(shí)反饋執(zhí)行狀態(tài),形成精確的位置反饋系統(tǒng),。進(jìn)口氣動(dòng)執(zhí)行器控制器
- 進(jìn)口雙螺紋不松動(dòng)螺栓設(shè)備 2025-06-01
- 國產(chǎn)雙螺紋防松動(dòng)螺栓多少錢 2025-06-01
- 進(jìn)口純結(jié)構(gòu)防松動(dòng)螺栓 2025-05-31
- 轉(zhuǎn)動(dòng)設(shè)備防松動(dòng)螺栓技術(shù) 2025-05-31
- 鋼鐵廠純結(jié)構(gòu)不松動(dòng)螺栓裝置 2025-05-31
- 德國大料斗壓縮箱制造商 2025-05-31
- 進(jìn)口視覺識(shí)別變色螺栓裝置 2025-05-31
- 鐵路電機(jī)緊固不松動(dòng)螺栓原理 2025-05-31
- 景區(qū)水上垃圾收集器連接件 2025-05-31
- 地鐵水泵緊固不松動(dòng)螺栓多少錢 2025-05-31
- 長寧區(qū)定制智能語音助手 2025-06-01
- C1912X205Y14分子泵巴頓軸承公司 2025-06-01
- 南通耐高溫四氟接頭報(bào)價(jià) 2025-06-01
- 吉林自動(dòng)拉鉚螺母槍應(yīng)用 2025-06-01
- 山西全息投影空中成像三維成像 2025-06-01
- 廣東叉車多路閥液壓元件 2025-06-01
- 天津紅沖加熱爐廠家電話 2025-06-01
- 南寧生物質(zhì)鍋爐廠家哪個(gè)好 2025-06-01
- 浙江涂料機(jī)器人自動(dòng)化系統(tǒng) 2025-06-01
- 山西變壓器縱剪機(jī) 2025-06-01