河北ADAS駕駛輔助設(shè)備技術(shù)方案
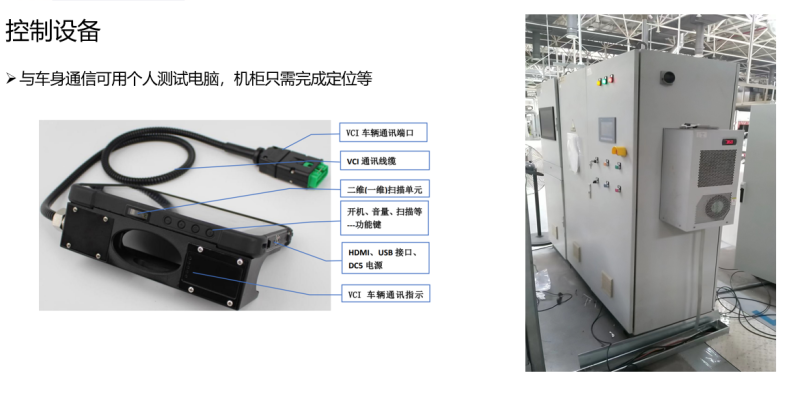
ADAS駕駛輔助設(shè)備與車載計(jì)算機(jī)之間的交互主要通過數(shù)據(jù)接口和通信協(xié)議實(shí)現(xiàn),。這些設(shè)備通過傳感器實(shí)時(shí)收集車輛周圍的環(huán)境數(shù)據(jù),,然后將這些數(shù)據(jù)通過高速數(shù)據(jù)接口傳輸?shù)杰囕d計(jì)算機(jī),。車載計(jì)算機(jī)會對這些數(shù)據(jù)進(jìn)行處理和分析,,利用先進(jìn)的算法和模型來識別道路標(biāo)志,、檢測障礙物,、測量與前車的距離和速度等,。這些信息會進(jìn)一步被用來評估潛在的駕駛風(fēng)險(xiǎn),,并生成相應(yīng)的控制指令,。這些控制指令隨后通過車載計(jì)算機(jī)的控制系統(tǒng)傳輸回ADAS設(shè)備,,從而實(shí)現(xiàn)對車輛操作的輔助。例如,,如果系統(tǒng)檢測到即將發(fā)生碰撞,,車載計(jì)算機(jī)需要會發(fā)送指令給ADAS設(shè)備,使其啟動自動緊急制動功能,。這款A(yù)DAS設(shè)備采用了先進(jìn)的圖像處理技術(shù),,提升了識別精度。河北ADAS駕駛輔助設(shè)備技術(shù)方案
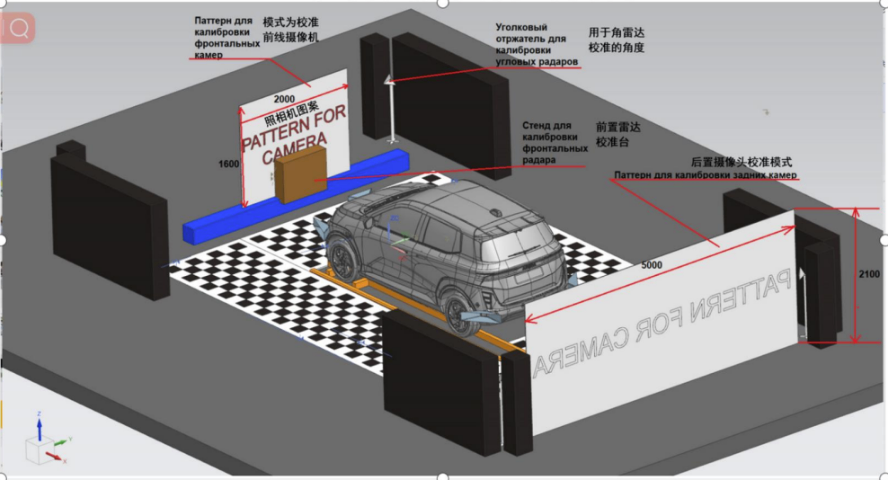
ADAS駕駛輔助設(shè)備通過采用多種傳感器來實(shí)時(shí)感知路況,,這些傳感器主要包括攝像頭,、毫米波雷達(dá)、激光雷達(dá)和超聲波雷達(dá)等,。首先,,攝像頭用于捕捉車輛周圍的圖像,包括前方道路,、行人,、車輛以及其他障礙物。通過圖像處理技術(shù),,系統(tǒng)能夠識別和分析這些圖像,,以檢測潛在的危險(xiǎn)情況。其次,,毫米波雷達(dá)能夠發(fā)射并接收毫米波信號,,通過測量反射回來的信號時(shí)間差,計(jì)算出物體與車輛之間的距離和速度,。這種雷達(dá)對于探測前方的車輛和障礙物非常有效,,尤其是在惡劣的天氣條件下,其性能表現(xiàn)穩(wěn)定,。另外,,激光雷達(dá)利用激光束掃描周圍環(huán)境,通過測量激光束從發(fā)射到接收的時(shí)間差,,來確定物體的距離和位置,。激光雷達(dá)的精度非常高,,能夠提供詳細(xì)的三維環(huán)境信息。韶關(guān)ADAS駕駛輔助設(shè)備技術(shù)方案通過ADAS的輔助,,駕駛員可以更好地掌握車輛周圍的交通情況,。
車道偏離報(bào)警系統(tǒng)(LDWS)的報(bào)警機(jī)制是一個(gè)復(fù)雜且高效的過程,旨在通過及時(shí)提供警告來幫助駕駛員維持車輛在正確的車道內(nèi)行駛,。以下是LDWS報(bào)警機(jī)制的主要步驟:信息采集:LDWS通過安裝在車輛上的傳感器(如攝像頭或雷達(dá))實(shí)時(shí)采集道路信息,。這些傳感器能夠檢測車道標(biāo)線、道路邊緣以及其他與車道相關(guān)的信息,。信息處理:采集到的道路信息隨后被傳輸?shù)杰囕v的計(jì)算單元進(jìn)行處理。這個(gè)計(jì)算單元會分析車道的位置,、形狀以及車輛的行駛軌跡,。偏離判斷:基于處理后的信息,系統(tǒng)能夠判斷車輛是否正在偏離其所在的車道,。這一判斷通??紤]了車輛的行駛速度、方向以及是否開啟了轉(zhuǎn)向燈等因素,。
ADAS駕駛輔助設(shè)備通常支持多語言界面,。這是因?yàn)楝F(xiàn)代汽車技術(shù)不斷追求用戶體驗(yàn)的多樣性和全球化。為了滿足不同國家和地區(qū)用戶的需求,,ADAS駕駛輔助設(shè)備的界面通常會提供多種語言選擇,。這樣,無論駕駛員使用哪種語言,,都能夠輕松理解和操作設(shè)備的界面。當(dāng)然,,具體的語言支持范圍需要因設(shè)備和制造商的不同而有所差異,。一些較好和先進(jìn)的ADAS系統(tǒng)需要支持更多的語言種類,以滿足更普遍的市場需求,。在購買和使用ADAS駕駛輔助設(shè)備時(shí),,建議用戶查閱設(shè)備的說明書或咨詢制造商,以了解具體的語言支持情況,。這款A(yù)DAS設(shè)備采用了節(jié)能設(shè)計(jì),,降低了能耗,延長了使用壽命,。

ADAS駕駛輔助設(shè)備通常支持個(gè)性化設(shè)置,。這種個(gè)性化設(shè)置主要體現(xiàn)在駕駛員可以根據(jù)自己的駕駛習(xí)慣和偏好來調(diào)整設(shè)備的各項(xiàng)參數(shù)和功能。首先,,不同的駕駛員需要有不同的駕駛風(fēng)格和反應(yīng)速度,,因此ADAS設(shè)備允許駕駛員調(diào)整其靈敏度和反應(yīng)時(shí)間,,以適應(yīng)個(gè)人的駕駛需求。例如,,在車道偏離預(yù)警系統(tǒng)中,,駕駛員可以設(shè)置系統(tǒng)對車道偏離的敏感度,以適應(yīng)不同的道路條件和駕駛環(huán)境,。其次,,ADAS設(shè)備通常具備多種駕駛模式選擇,如城市模式,、高速模式,、雨天模式等。駕駛員可以根據(jù)實(shí)際駕駛場景選擇合適的模式,,以獲得較好的駕駛輔助效果,。安裝了ADAS的車輛,,在霧天行駛時(shí)也能保持清晰的行車視線,。珠海ADAS駕駛輔助設(shè)備使用流程
ADAS駕駛輔助設(shè)備通過優(yōu)化車輛控制,,提高了燃油經(jīng)濟(jì)性,。河北ADAS駕駛輔助設(shè)備技術(shù)方案
ADAS駕駛輔助設(shè)備與車聯(lián)網(wǎng)技術(shù)的結(jié)合,,主要是通過車輛與車輛,、車輛與基礎(chǔ)設(shè)施、車輛與行人之間的無線通信,,實(shí)現(xiàn)信息的實(shí)時(shí)共享和交互,。這種結(jié)合能夠進(jìn)一步提升駕駛的安全性和道路通行效率,。具體來說,,ADAS設(shè)備通過其傳感器和攝像頭收集車輛周圍環(huán)境的數(shù)據(jù),,包括道路情況,、交通標(biāo)志、障礙物以及其他車輛的位置和速度等,。這些數(shù)據(jù)經(jīng)過處理后,不只用于輔助駕駛員做出更好的駕駛決策,,同時(shí)也會通過車聯(lián)網(wǎng)技術(shù)傳輸?shù)狡渌囕v或基礎(chǔ)設(shè)施,。例如,當(dāng)一輛車檢測到前方有障礙物或事故時(shí),,它可以通過車聯(lián)網(wǎng)技術(shù)將這一信息發(fā)送給其他車輛,,使其他車輛也能及時(shí)了解到這一危險(xiǎn)情況,,從而采取避讓措施,避免事故的發(fā)生,。河北ADAS駕駛輔助設(shè)備技術(shù)方案
- 北京汽車液冷超充設(shè)備使用流程 2025-06-17
- 青海整車電檢檢測設(shè)備好處 2025-06-17
- 寧夏EOL電檢檢測設(shè)備廠家 2025-06-17
- 廣州機(jī)動車整車電檢檢測設(shè)備報(bào)價(jià) 2025-06-17
- 四川機(jī)動車整車電檢檢測設(shè)備用途 2025-06-17
- 新疆大功率液冷超充設(shè)備功能 2025-06-17
- 蘇州國內(nèi)液冷超充設(shè)備怎么用 2025-06-17
- 河北ADAS駕駛輔助設(shè)備技術(shù)方案 2025-06-16
- 石家莊ADAS駕駛輔助設(shè)備排行榜 2025-06-16
- 徐州ADAS駕駛輔助設(shè)備如何使用 2025-06-16
- 日照汽車車燈價(jià)格 2025-06-17
- 湖北市場密封墊片銷售廠家 2025-06-17
- 六安現(xiàn)代出入口控制設(shè)備廠家電話 2025-06-17
- 嘉興172缸頭廠家精選 2025-06-17
- 蘇州雙色注塑產(chǎn)品加工 2025-06-17
- 湖北車輛主動安全預(yù)警系統(tǒng)開發(fā)平臺 2025-06-17
- 江西鋁合金冷擠壓冷擠壓件 2025-06-17
- 西山區(qū)越野拖掛房車遠(yuǎn)征者500維修 2025-06-17
- 福州德莎4298mopp膠帶價(jià)格 2025-06-17
- 雙流區(qū)越野拖掛房車遠(yuǎn)征者600維修 2025-06-17