-
 虹口區(qū)定做磁浮備用軸承設(shè)備廠家
虹口區(qū)定做磁浮備用軸承設(shè)備廠家5.根據(jù)權(quán)利要求4所述的磁懸浮軸承控制裝置,,其特征在于,,所述差分系統(tǒng)包括:一***電流傳感器和一第二電流傳感器;其中,,所述減法器的一輸入端電連接***電流傳感器,,所述***電流傳感器用于采集所述***軸承線圈的電流;以及,,所述減法器的另一輸入端電連接第二電流傳感器,,所述第二電流傳感器用于采集所述第二軸承線圈的電流。6.根據(jù)權(quán)利要求4所述的磁懸浮軸承控制裝置,,其特征在于,,所述減法器的同相端接入所述***軸承線圈的電流;以及,,所述減法器的反相端接入所述第二軸承線圈的電流,;其中,所述電流調(diào)節(jié)器對(duì)所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,,并將所述***功率放大器...
2025-06-16 -
 上海本地磁浮備用軸承價(jià)格大全
上海本地磁浮備用軸承價(jià)格大全推薦的,所述減法器的同相端接入所述***軸承線圈的電流,;以及,,所述減法器的反相端接入所述第二軸承線圈的電流;其中,,所述電流調(diào)節(jié)器對(duì)所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,,并將所述***功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比加上所述調(diào)節(jié)占空比,且將所述第二功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比減去所述調(diào)節(jié)占空比,。推薦的,,所述減法器的同相端接入所述第二軸承線圈的電流;以及,,所述減法器的反相端接入所述***軸承線圈的電流,;其中,所述電流調(diào)節(jié)器對(duì)所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,,并將所述***功率放大器的運(yùn)行...
2025-06-15 -
虹口區(qū)整套磁浮備用軸承怎么樣
三、透平機(jī)械和離心機(jī)透平機(jī)械和離心機(jī)是磁軸承的重要應(yīng)用領(lǐng)域之一,。優(yōu)點(diǎn)是易于實(shí)現(xiàn)高速運(yùn)行,,能調(diào)整剛度和阻尼,實(shí)現(xiàn)對(duì)振動(dòng)的控制,,獲得預(yù)定動(dòng)態(tài)性能,由于沒有潤滑劑,,因此也就不需要密封,,可進(jìn)一步簡化結(jié)構(gòu)。四,、電力工程根據(jù)磁性軸承的原理,,研制大功率的磁性軸承和飛輪儲(chǔ)能系統(tǒng)以減少調(diào)峰時(shí)機(jī)組起停次數(shù);進(jìn)行以磁性軸承系統(tǒng)為基礎(chǔ)的振動(dòng)控制理論的研究,,將其應(yīng)用 于汽輪機(jī)轉(zhuǎn)子的振動(dòng)和故障分析中,;通過調(diào)整磁性軸承的剛度來改變汽輪機(jī)轉(zhuǎn)子結(jié)構(gòu)設(shè)計(jì)的思想,從而改善轉(zhuǎn)子運(yùn)行的動(dòng)態(tài)特性,,避免共振,,提高機(jī)組運(yùn)行的可靠性等。 [2]初始成本較高,,但長期運(yùn)行可節(jié)省維護(hù)費(fèi)用,。虹口區(qū)整套磁浮備用軸承怎么樣無需潤滑:無需潤滑油或脂,減少了...
2025-06-15 -
 松江區(qū)附近磁浮備用軸承廠家現(xiàn)貨
松江區(qū)附近磁浮備用軸承廠家現(xiàn)貨該發(fā)明實(shí)施例可選的所述位移調(diào)節(jié)器為位移PID(Proportion Integration Differentiation,,比例-積分-微分)調(diào)節(jié)器,。以及,該發(fā)明實(shí)施例可選的所述電流調(diào)節(jié)器為電流PID調(diào)節(jié)器,。此外,,參考圖3所示,所述差分系統(tǒng)70包括:一減法器71,,其中,,所述減法器71的一輸入端接入所述***軸承線圈10的電流,,所述減法器72的另一端接入所述第二軸承線圈20的電流。其中,,所述差分系統(tǒng)包括:一***電流傳感器72和一第二電流傳感器73,;其中,所述減法器71的一輸入端電連接***電流傳感器72,,所述***電流傳感器72用于采集所述***軸承線圈10的電流,;以及,所述減法器71的另一輸...
2025-06-15 -
金山區(qū)靠譜的磁浮備用軸承廠家直銷
該發(fā)明實(shí)施例可選的所述位移調(diào)節(jié)器為位移PID(Proportion Integration Differentiation,,比例-積分-微分)調(diào)節(jié)器,。以及,該發(fā)明實(shí)施例可選的所述電流調(diào)節(jié)器為電流PID調(diào)節(jié)器,。此外,,參考圖3所示,所述差分系統(tǒng)70包括:一減法器71,,其中,,所述減法器71的一輸入端接入所述***軸承線圈10的電流,所述減法器72的另一端接入所述第二軸承線圈20的電流,。其中,,所述差分系統(tǒng)包括:一***電流傳感器72和一第二電流傳感器73;其中,,所述減法器71的一輸入端電連接***電流傳感器72,,所述***電流傳感器72用于采集所述***軸承線圈10的電流;以及,,所述減法器71的另一輸...
2025-06-14 -
 靜安區(qū)直銷磁浮備用軸承選擇
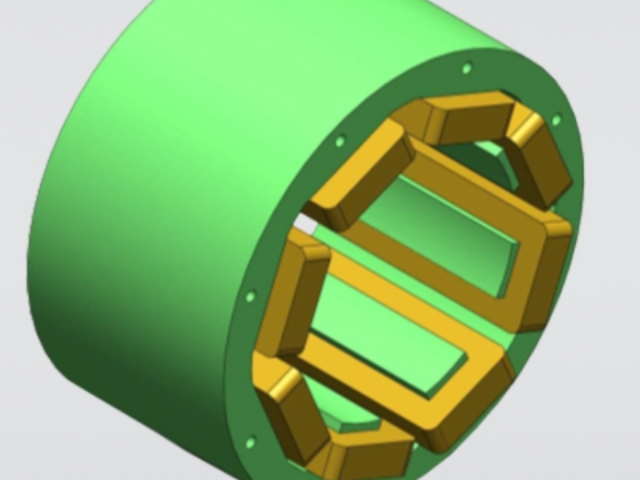
靜安區(qū)直銷磁浮備用軸承選擇9.一種磁懸浮軸承系統(tǒng),,其特征在于,所述磁懸浮軸承系統(tǒng)包括權(quán)利要求1~8任意一項(xiàng)所述的磁懸浮軸承控制裝置,。參考圖1所示,,為2015年12月以前的一種磁懸浮控制裝置的結(jié)構(gòu)示意圖,其中,,控制裝置包括有***軸承線圈1和第二軸承線圈2,,與***軸承線圈1相連的***功率放大器3和與第二軸承線圈2相連的第二功率放大器4,以及,,控制模塊5,,其中,***軸承線圈1和第二軸承線圈2之間設(shè)置有轉(zhuǎn)子6,??刂颇K5用于感應(yīng)轉(zhuǎn)子6發(fā)生偏移時(shí),通過調(diào)節(jié)***軸承線圈1和第二軸承線圈2上的電流,,使其產(chǎn)生一差動(dòng)電流以控制轉(zhuǎn)子6返回預(yù)設(shè)位置,。2015年12月以前的磁懸浮軸承控制裝置結(jié)構(gòu)較為復(fù)雜,,控制模塊的運(yùn)算量較大,,進(jìn)而占...
2025-06-14 -
松江區(qū)靠譜的磁浮備用軸承價(jià)格大全
磁懸浮軸承(Magnetic Bearing) 是利用磁力作用將轉(zhuǎn)子懸浮于空中,,使轉(zhuǎn)子與定子之間沒有機(jī)械接觸,。其原理是磁感應(yīng)線與磁浮線成垂直,軸芯與磁浮線是平行的,,所以轉(zhuǎn)子的重量就固定在運(yùn)轉(zhuǎn)的軌道上,,利用幾乎是無負(fù)載的軸芯往反磁浮線方向頂撐,形成整個(gè)轉(zhuǎn)子懸空,,在固定運(yùn)轉(zhuǎn)軌道上,。2024年12月16日,從哈電集團(tuán)獲悉,,哈電集團(tuán)佳電股份先進(jìn)電機(jī)公司已自主掌握磁懸浮軸承及控制系統(tǒng)的設(shè)計(jì),、制造、調(diào)試等全部**技術(shù),,生產(chǎn)出具有自主技術(shù)的磁懸浮軸承產(chǎn)品,。其控制系統(tǒng)能夠?qū)崟r(shí)調(diào)節(jié)電流大小和方向,以確保轉(zhuǎn)子穩(wěn)定懸浮在定子中間,。松江區(qū)靠譜的磁浮備用軸承價(jià)格大全磁浮軸承傳感器的制造廠商主要有美國本特利,,德國申克;國...
2025-06-14 -
 徐匯區(qū)質(zhì)量磁浮備用軸承怎么樣
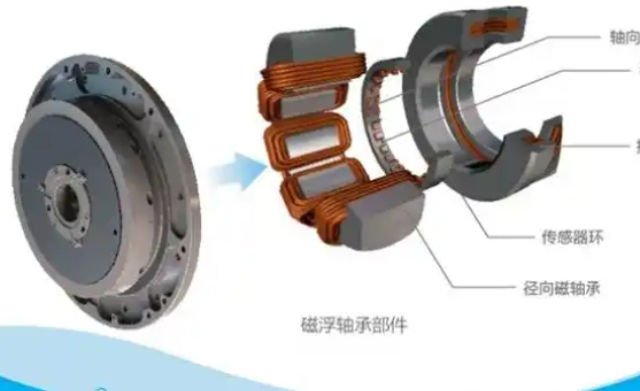
徐匯區(qū)質(zhì)量磁浮備用軸承怎么樣磁性軸承主要由機(jī)械部分和電氣控制部分組成,。機(jī)械部分由轉(zhuǎn)子和帶線圈的定子組成。定子所產(chǎn)生的電磁力使轉(zhuǎn)子保持在一定的位置上定子和轉(zhuǎn)子之間有間隙,,轉(zhuǎn)子處于懸浮狀態(tài),。位移傳感器監(jiān)測轉(zhuǎn)子的位置,一旦轉(zhuǎn)子偏離所要求的位置,,傳感器就發(fā)出信號(hào),,伺服控制系統(tǒng)根據(jù)參考信號(hào)(轉(zhuǎn)子要求的位置信號(hào))與傳感器信號(hào)之差值來調(diào)整定子線圈中的電流,使轉(zhuǎn)子恢復(fù)到原來位置,。為了減少轉(zhuǎn)子形狀誤差對(duì)傳感器信號(hào)的影響,,且加快過渡響應(yīng)時(shí)間,在實(shí)用磁性軸承中,,一般采用差動(dòng)聯(lián)接,。當(dāng)主軸承出現(xiàn)故障時(shí),備用軸承可以迅速啟動(dòng)并接管支撐任務(wù),。徐匯區(qū)質(zhì)量磁浮備用軸承怎么樣在該發(fā)明實(shí)施例提供的圖3中,,所述減法器71的同相端接入所述***軸承線圈10的電流...
2025-06-14 -
徐匯區(qū)靠譜的磁浮備用軸承價(jià)格查詢
磁軸承要得到廣泛的應(yīng)用,模擬控制器的在線調(diào)節(jié)性能差不能不說是其原因之一,,因此,,數(shù)字化方向是磁軸承的發(fā)展趨勢,。同時(shí),要實(shí)現(xiàn)磁軸承系統(tǒng)的智能化,,顯然模擬控制器是難以滿足這方面的要求,。因此從提高磁軸承性能、可靠性,、增強(qiáng)控制器的柔性和減小體積,、功耗和今后往網(wǎng)絡(luò)化、智能化方向發(fā)展等角度,,必須實(shí)現(xiàn)控制器數(shù)字化,。近三十年來控制理論得到飛速發(fā)展并取得了廣泛應(yīng)用。我國對(duì)磁軸承的研究始于50年代末,,后因各種原因進(jìn)展不快,,近十年才引起科研單位的足夠重視。清華大學(xué)工程物理系的趙鴻賓教授從1988年致力于此項(xiàng)研究,,趙教授介紹說,,磁軸承屬機(jī)電一體化產(chǎn)品,是控制理論,、電子電力,、電磁學(xué)、轉(zhuǎn)子動(dòng)力學(xué)及計(jì)算機(jī)科學(xué)等學(xué)科交叉的結(jié)晶...
2025-06-14 -
普陀區(qū)常見磁浮備用軸承貨源充足
此外,,該發(fā)明實(shí)施例對(duì)提供的減法器的同相端和反相端連接的軸承線圈電流不作限制,,即,所述減法器的同相端接入所述第二軸承線圈的電流,;以及,,所述減法器的反相端接入所述***軸承線圈的電流;其中,,所述電流調(diào)節(jié)器對(duì)所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,并將所述***功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比減去所述調(diào)節(jié)占空比,,且將所述第二功率放大器的運(yùn)行占空比調(diào)節(jié)為其當(dāng)前占空比加上所述調(diào)節(jié)占空比,。以永磁體或超導(dǎo)體實(shí)現(xiàn)對(duì)轉(zhuǎn)子部分自由度的支承。普陀區(qū)常見磁浮備用軸承貨源充足磁浮軸承傳感器,,又叫磁懸浮軸承傳感器,,是用于控制由永久磁鐵或者電磁鐵組成的軸承,配套組成數(shù)控磁軸...
2025-06-13 -
松江區(qū)本地磁浮備用軸承價(jià)格查詢
由上述內(nèi)容可知,該發(fā)明實(shí)施例提供的技術(shù)方案,,在轉(zhuǎn)子偏離預(yù)設(shè)位置時(shí),通過調(diào)節(jié)***功率放大器和第二功率放大器的當(dāng)前占空比,,使得***軸承線圈和第二軸承線圈之間產(chǎn)生一差動(dòng)電流,進(jìn)而調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,,控制裝置的結(jié)構(gòu)簡單,且控制過程的運(yùn)算量減小,,減小了運(yùn)算時(shí)間,進(jìn)而提高了控制的實(shí)時(shí)性,。進(jìn)一步的,,參考圖3所示,,為該發(fā)明實(shí)施例提供的又一種磁懸浮軸承控制裝置的結(jié)構(gòu)示意圖,,其中,所述位移調(diào)節(jié)系統(tǒng)60包括:一位移傳感器62,;以及,,與所述位移傳感器62相連的位移調(diào)節(jié)器61,;其中,所述位移傳感器62采集所述轉(zhuǎn)子30偏離預(yù)設(shè)位置的偏離位移,,所述位移調(diào)節(jié)器61將所述偏離位移轉(zhuǎn)換為偏移電流值,。對(duì)材料和技術(shù)要求較高,需要...
2025-06-13 -
青浦區(qū)靠譜的磁浮備用軸承設(shè)備廠家
其特征在于,所述控制裝置還包括:位移調(diào)節(jié)系統(tǒng),、差分系統(tǒng)和電流調(diào)節(jié)器;其中,,所述位移調(diào)節(jié)系統(tǒng)采集所述轉(zhuǎn)子偏離預(yù)設(shè)位置的偏離位移,,并將所述偏離位移轉(zhuǎn)換為偏移電流值,且同時(shí)所述差分系統(tǒng)對(duì)所述***軸承線圈的當(dāng)前電流值和第二軸承線圈的當(dāng)前電流值作差分處理后得到差分電流值;所述電流調(diào)節(jié)器對(duì)所述偏移電流值和差分電流值求差得到調(diào)節(jié)電流值,,且將所述調(diào)節(jié)電流值轉(zhuǎn)換為調(diào)節(jié)占空比,,并根據(jù)所述調(diào)節(jié)占空比分別對(duì)所述***功率放大器和第二功率放大器各自的當(dāng)前占空比進(jìn)行調(diào)節(jié),,以控制所述***軸承線圈和第二軸承線圈調(diào)節(jié)所述轉(zhuǎn)子至所述預(yù)設(shè)位置,。降低了維護(hù)成本和停機(jī)時(shí)間,。青浦區(qū)靠譜的磁浮備用軸承設(shè)備廠家**目的《一種磁懸浮軸承控...
2025-06-13 -
楊浦區(qū)靠譜的磁浮備用軸承怎么樣
由上述內(nèi)容可知,,該發(fā)明實(shí)施例提供的技術(shù)方案,在轉(zhuǎn)子偏離預(yù)設(shè)位置時(shí),,通過調(diào)節(jié)***功率放大器和第二功率放大器的當(dāng)前占空比,,使得***軸承線圈和第二軸承線圈之間產(chǎn)生一差動(dòng)電流,進(jìn)而調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,,控制裝置的結(jié)構(gòu)簡單,,且控制過程的運(yùn)算量減小,減小了運(yùn)算時(shí)間,,進(jìn)而提高了控制的實(shí)時(shí)性,。進(jìn)一步的,參考圖3所示,,為該發(fā)明實(shí)施例提供的又一種磁懸浮軸承控制裝置的結(jié)構(gòu)示意圖,,其中,,所述位移調(diào)節(jié)系統(tǒng)60包括:一位移傳感器62,;以及,與所述位移傳感器62相連的位移調(diào)節(jié)器61,;其中,,所述位移傳感器62采集所述轉(zhuǎn)子30偏離預(yù)設(shè)位置的偏離位移,所述位移調(diào)節(jié)器61將所述偏離位移轉(zhuǎn)換為偏移電流值,。降低了維護(hù)成本和停機(jī)時(shí)間,。...
2025-06-12 -
虹口區(qū)質(zhì)量磁浮備用軸承怎么樣
然后功率放大器將這一控制信號(hào)轉(zhuǎn)換成控制電流,,控制電流在執(zhí)行磁鐵中產(chǎn)生磁力,,從而驅(qū)動(dòng)轉(zhuǎn)子返回到原來平衡位置。因此,,不論轉(zhuǎn)子受到向下或向上的擾動(dòng),,轉(zhuǎn)子始終能處于穩(wěn)定的平衡狀態(tài)。主動(dòng)磁懸浮軸承在國內(nèi)還沒有達(dá)到實(shí)用的技術(shù),,在國外則在一些領(lǐng)域?qū)崿F(xiàn)了應(yīng)用,,如透平機(jī),膨脹機(jī),,壓縮機(jī)等等,。2024年12月16日,從哈電集團(tuán)獲悉,,由哈電集團(tuán)佳電股份先進(jìn)電機(jī)公司承擔(dān)的“TFYZY 150-2/12000正壓外殼型高速永磁三相同步發(fā)電機(jī)及磁懸浮驅(qū)動(dòng)控制系統(tǒng)”項(xiàng)目,,于12月12日通過評(píng)審。評(píng)委會(huì)認(rèn)為,,該公司已自主掌握磁懸浮軸承及控制系統(tǒng)的設(shè)計(jì),、制造、調(diào)試等全部**技術(shù),,生產(chǎn)出具有自主技術(shù)的磁懸浮軸承產(chǎn)品,。哈電集團(tuán)安裝...
2025-06-12 -
虹口區(qū)直銷磁浮備用軸承怎么樣
(3)剛度 、阻尼均可調(diào),從而使轉(zhuǎn)子很容易通過臨界轉(zhuǎn)速,,實(shí)現(xiàn)超高速運(yùn)轉(zhuǎn),;(4)全部回轉(zhuǎn)特性 (如速度 、載荷,、軸線位置,、失衡量 、千擾頻率等) 都可以通過傳感器和控制系統(tǒng)的信息獲取,,因而可對(duì)機(jī)器的運(yùn)行狀態(tài)實(shí)行診斷和監(jiān)控,,這對(duì)高性能機(jī)床的適應(yīng)控制特別有利;(5)可靠性高,,一方面因無磨損,沒有潤滑和密封裝置,。機(jī)械結(jié)構(gòu)得到簡化,,從而保證了高可靠性;另一方面,,回轉(zhuǎn)件無繞組,,定子繞組則類似于電機(jī)定子繞組,控制裝置由可更換的印刷電路板制成,,其設(shè)計(jì),,制作采用富余度技術(shù),可獲得幾乎無限的使用壽命,,故可靠度極高,。 [1]機(jī)械結(jié)構(gòu)中包含了電磁鐵和永磁體或超導(dǎo)體,結(jié)合了主動(dòng)磁軸承和被動(dòng)磁軸承的特點(diǎn),。虹口區(qū)直銷磁浮備...
2025-06-12 -
虹口區(qū)附近磁浮備用軸承選擇
(3)剛度 ,、阻尼均可調(diào),從而使轉(zhuǎn)子很容易通過臨界轉(zhuǎn)速,,實(shí)現(xiàn)超高速運(yùn)轉(zhuǎn),;(4)全部回轉(zhuǎn)特性 (如速度 、載荷,、軸線位置,、失衡量 、千擾頻率等) 都可以通過傳感器和控制系統(tǒng)的信息獲取,,因而可對(duì)機(jī)器的運(yùn)行狀態(tài)實(shí)行診斷和監(jiān)控,,這對(duì)高性能機(jī)床的適應(yīng)控制特別有利;(5)可靠性高,,一方面因無磨損,,沒有潤滑和密封裝置。機(jī)械結(jié)構(gòu)得到簡化,,從而保證了高可靠性,;另一方面,,回轉(zhuǎn)件無繞組,定子繞組則類似于電機(jī)定子繞組,,控制裝置由可更換的印刷電路板制成,,其設(shè)計(jì),制作采用富余度技術(shù),,可獲得幾乎無限的使用壽命,,故可靠度極高。 [1]隨著技術(shù)的不斷發(fā)展,,磁浮備用軸承的性能將進(jìn)一步提升,,為設(shè)備的安全穩(wěn)定運(yùn)行提供更加可靠的保障。...
2025-06-12 -
青浦區(qū)附近磁浮備用軸承設(shè)備廠家
三,、透平機(jī)械和離心機(jī)透平機(jī)械和離心機(jī)是磁軸承的重要應(yīng)用領(lǐng)域之一,。優(yōu)點(diǎn)是易于實(shí)現(xiàn)高速運(yùn)行,能調(diào)整剛度和阻尼,,實(shí)現(xiàn)對(duì)振動(dòng)的控制,,獲得預(yù)定動(dòng)態(tài)性能,由于沒有潤滑劑,,因此也就不需要密封,,可進(jìn)一步簡化結(jié)構(gòu)。四,、電力工程根據(jù)磁性軸承的原理,,研制大功率的磁性軸承和飛輪儲(chǔ)能系統(tǒng)以減少調(diào)峰時(shí)機(jī)組起停次數(shù);進(jìn)行以磁性軸承系統(tǒng)為基礎(chǔ)的振動(dòng)控制理論的研究,,將其應(yīng)用 于汽輪機(jī)轉(zhuǎn)子的振動(dòng)和故障分析中,;通過調(diào)整磁性軸承的剛度來改變汽輪機(jī)轉(zhuǎn)子結(jié)構(gòu)設(shè)計(jì)的思想,從而改善轉(zhuǎn)子運(yùn)行的動(dòng)態(tài)特性,,避免共振,,提高機(jī)組運(yùn)行的可靠性等。 [2]磁浮備用軸承作為一種新型高性能軸承,,在關(guān)鍵設(shè)備中發(fā)揮著重要作用,。青浦區(qū)附近磁浮備用軸承設(shè)備廠家由于不...
2025-06-12 -
寶山區(qū)耐用磁浮備用軸承設(shè)備廠家
**目的《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》的目的是提供一種優(yōu)化的磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng),在轉(zhuǎn)子偏離預(yù)設(shè)位置時(shí),,通過調(diào)節(jié)功率放大器的占空比使得***軸承線圈和第二軸承線圈之間產(chǎn)生一差動(dòng)電流,,以調(diào)節(jié)轉(zhuǎn)子至預(yù)設(shè)位置,控制裝置的結(jié)構(gòu)簡單,,且控制過程的運(yùn)算量減小,,減小了運(yùn)算時(shí)間,進(jìn)而提高了控制的實(shí)時(shí)性。 [3]技術(shù)方案《一種磁懸浮軸承控制裝置及磁懸浮軸承系統(tǒng)》提供的技術(shù)方案如下:一種磁懸浮軸承控制裝置,,包括:作用相反的***軸承線圈和第二軸承線圈,;其中,所述***軸承線圈和第二軸承線圈之間設(shè)置有轉(zhuǎn)子,,且所述***軸承線圈連接***功率放大器,,所述第二軸承線圈連接第二功率放大器。引入更...
2025-06-12 -
金山區(qū)整套磁浮備用軸承怎么樣
(2)無源磁軸承P(assiveMagnetioBearing簡稱PMB),也稱為被動(dòng)磁軸承,以永磁體或超導(dǎo)體實(shí)現(xiàn)對(duì)轉(zhuǎn)子部分自由度的支承;(3)混合磁軸承(永磁偏置)(H沙ridMa,etieBearing簡稱HMB),其機(jī)械結(jié)構(gòu)中包含了電磁鐵和永磁體或超導(dǎo)體,。 [2]磁軸承利用電磁鐵和鐵磁材料之間的吸力實(shí)現(xiàn)轉(zhuǎn)子的無接觸懸浮,如果電磁鐵中通過的是恒定勵(lì)磁電流,則轉(zhuǎn)子屬于不穩(wěn)定系統(tǒng),微小的擾動(dòng)就能使轉(zhuǎn)子偏離平衡位置而無法復(fù)原,因此,必須對(duì)磁軸承施加主動(dòng)控制才能使轉(zhuǎn)子穩(wěn)定工作,。高轉(zhuǎn)速:磁軸承能夠支持更高的轉(zhuǎn)速,因?yàn)闆]有摩擦產(chǎn)生的熱量限制,。金山區(qū)整套磁浮備用軸承怎么樣三,、透平機(jī)械和離心機(jī)透平機(jī)械和離...
2025-06-12