-
全自動金相切割機的切割精度與穩(wěn)定性分析-全自動金相切割機
-
全自動顯微維氏硬度計在電子元器件檢測中的重要作用
-
全自動顯微維氏硬度計:提高材料質(zhì)量評估的關(guān)鍵工具
-
全自動維氏硬度計對現(xiàn)代制造業(yè)的影響?-全自動維氏硬度計
-
跨越傳統(tǒng)界限:全自動顯微維氏硬度計在復(fù)合材料檢測中的應(yīng)用探索
-
從原理到實踐:深入了解全自動顯微維氏硬度計的工作原理
-
全自動金相切割機在半導(dǎo)體行業(yè)的應(yīng)用前景-全自動金相切割機
-
全自動金相切割機的工作原理及優(yōu)勢解析-全自動金相切割機
-
全自動洛氏硬度計在材料科學(xué)研究中的應(yīng)用?-全自動洛氏硬度計
-
全自動維氏硬度計在我國市場的發(fā)展現(xiàn)狀及展望-全自動維氏硬度計
鎮(zhèn)江手動搬運機械手
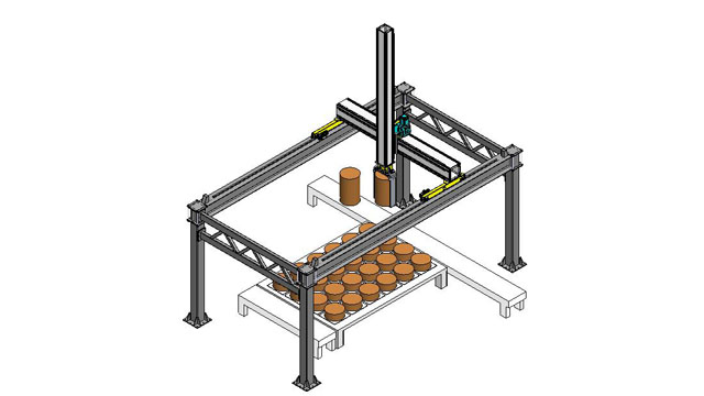
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu)、Y軸運行機構(gòu),、Z軸升降機構(gòu),、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,。二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應(yīng),;2.連續(xù)工作時間長;3.定位精度可達(dá)0.02mm,;4.重型工件的碼垛,、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位),、剎車裝置,、超載極限保護(hù)裝置;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,,防超程裝置等,;7.誤操作保護(hù)裝置。三坐標(biāo)搬運機械手,,自動化程度高,,南京高銳特生產(chǎn)。鎮(zhèn)江手動搬運機械手
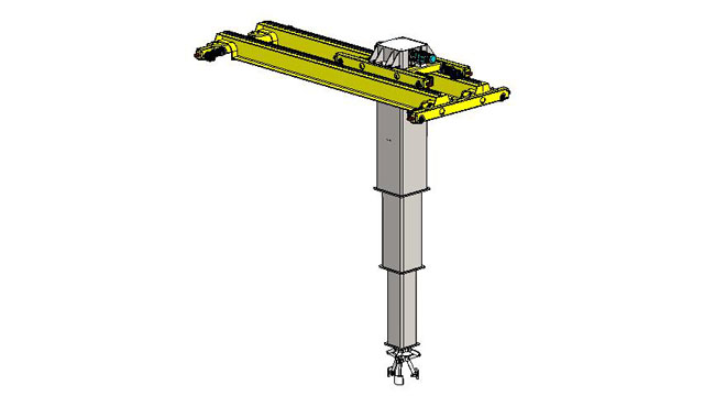
一,、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu)、Y軸運行機構(gòu),、Z軸升降機構(gòu),、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,。 二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng); 2.連續(xù)工作時間長,;3.定位精度可達(dá)0.02mm,;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位),、剎車裝置、超載極限保護(hù)裝置,;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,,防超程裝置等,;7.誤操作保護(hù)裝置,。三、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),,采用齒輪細(xì)條傳動,,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,,傳感器檢測元件+機械限位;Y軸方向升降機構(gòu),,采用帶式傳動,,傳感器檢測元件+機械限位;氣動抓取機械手,,采用雙爪氣動動力裝置,,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,,傳感器檢測元件+機械限位,;控制系統(tǒng),通過PLC全自動控制,,采集各傳感器或按鈕的輸入信號,,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。長寧區(qū)搬運機械手生產(chǎn)智能三坐標(biāo)搬運機械手哪家生產(chǎn),,南京高銳特,。
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu),、Y軸運行機構(gòu),、Z軸升降機構(gòu)、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應(yīng),;2.連續(xù)工作時間長;3. 定位精度可達(dá)0.02mm,;4.重型工件的碼垛,、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位),、剎車裝置,、超載極限保護(hù)裝置;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,,防超程裝置等,;7.誤操作保護(hù)裝置。
一,、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu)、Y軸運行機構(gòu),、Z軸升降機構(gòu),、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,。 二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng),;2.連續(xù)工作時間長,;3.定位精度可達(dá)0.02mm;4.重型工件的碼垛,、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位)、剎車裝置,、超載極限保護(hù)裝置,;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,防超程裝置等,;7.誤操作保護(hù)裝置,。 三,、 搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu),、Y軸運行機構(gòu),、Z軸升降機構(gòu)、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,;X軸方向運行機構(gòu),采用齒輪細(xì)條傳動,,傳感器檢測元件+機械限位,;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,,傳感器檢測元件+機械限位,;Y軸方向升降機構(gòu),采用帶式傳動,,傳感器檢測元件+機械限位,;氣動抓取機械手,,采用雙爪氣動動力裝置,,實現(xiàn)機械手的開閉,爪指采用內(nèi)爪式,,傳感器檢測元件+機械限位,;控制系統(tǒng),通過PLC全自動控制,,采集各傳感器或按鈕的輸入信號,,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行。三坐標(biāo)搬運機械手,,PLC控制,。南京高銳特起重機械有限公司生產(chǎn)。
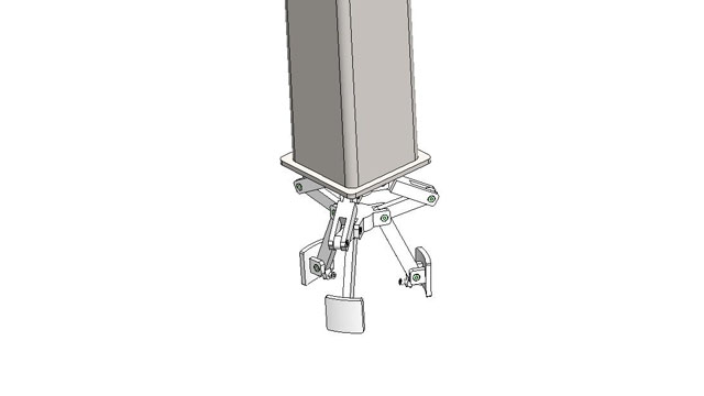
一,、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu)、Y軸運行機構(gòu),、Z軸升降機構(gòu),、抓取機械手、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,。 二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,可用伺服電機快速響應(yīng),;2.連續(xù)工作時間長,;3.定位精度可達(dá)0.02mm,;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位),、剎車裝置、超載極限保護(hù)裝置,;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,,防超程裝置等;7.誤操作保護(hù)裝置,。 三,、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu),、Y軸運行機構(gòu),、Z軸升降機構(gòu)、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成,;X軸方向運行機構(gòu),采用齒輪細(xì)條傳動,,傳感器檢測元件+機械限位,;Z軸方向運行機構(gòu), 采用全封閉減速電機角型輪傳動+齒輪齒條傳動,,傳感器檢測元件+機械限位,;Y軸方向升降機構(gòu),采用帶式傳動,,傳感器檢測元件+機械限位,;氣動抓取機械手,采用雙爪氣動動力裝置,,實現(xiàn)機械手的開閉,,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位,;控制系統(tǒng),,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行,。三坐標(biāo)搬運機械手,氣動抓手,,PLC控制,,南京生產(chǎn)?;幢卑徇\機械手行情
三坐標(biāo)搬運機械手生產(chǎn)廠家,,南京,。鎮(zhèn)江手動搬運機械手
一、搬運機械手簡介:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成。二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應(yīng);2.連續(xù)工作時間長,;3.定位精度可達(dá)0.02mm,;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,;5.各機構(gòu)均設(shè)有限位裝置(機電雙限位),、剎車裝置、超載極限保護(hù)裝置,;6.氣動抓取機械手設(shè)有斷氣保護(hù)裝置,,防超程裝置等;7.誤操作保護(hù)裝置,。三,、搬運機械手產(chǎn)品構(gòu)成:三坐標(biāo)搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導(dǎo)電系統(tǒng)及控制系統(tǒng)等組成;X軸方向運行機構(gòu),,采用齒輪細(xì)條傳動,,傳感器檢測元件+機械限位;Z軸方向運行機構(gòu),,采用全封閉減速電機角型輪傳動+齒輪齒條傳動,,傳感器檢測元件+機械限位;Y軸方向升降機構(gòu),,采用帶式傳動,,傳感器檢測元件+機械限位;氣動抓取機械手,,采用雙爪氣動動力裝置,,實現(xiàn)機械手的開閉,,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位,;控制系統(tǒng),,通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行,。鎮(zhèn)江手動搬運機械手
南京高銳特起重機械有限公司是一家集研發(fā)、制造,、銷售為一體的****,,公司位于東溝鎮(zhèn)府前街118號,成立于2006-11-13,。公司秉承著技術(shù)研發(fā),、客戶優(yōu)先的原則,為國內(nèi)起重輸送機械,,自動起重輸送,,智能起重輸送,電動葫蘆的產(chǎn)品發(fā)展添磚加瓦,。主要經(jīng)營起重輸送機械,,自動起重輸送,智能起重輸送,,電動葫蘆等產(chǎn)品服務(wù),,現(xiàn)在公司擁有一支經(jīng)驗豐富的研發(fā)設(shè)計團(tuán)隊,對于產(chǎn)品研發(fā)和生產(chǎn)要求極為嚴(yán)格,,完全按照行業(yè)標(biāo)準(zhǔn)研發(fā)和生產(chǎn),。南京高銳特起重機械有限公司每年將部分收入投入到起重輸送機械,自動起重輸送,,智能起重輸送,,電動葫蘆產(chǎn)品開發(fā)工作中,也為公司的技術(shù)創(chuàng)新和人材培養(yǎng)起到了很好的推動作用,。公司在長期的生產(chǎn)運營中形成了一套完善的科技激勵政策,,以激勵在技術(shù)研發(fā)、產(chǎn)品改進(jìn)等,。南京高銳特起重機械有限公司嚴(yán)格規(guī)范起重輸送機械,,自動起重輸送,智能起重輸送,,電動葫蘆產(chǎn)品管理流程,,確保公司產(chǎn)品質(zhì)量的可控可靠。公司擁有銷售/售后服務(wù)團(tuán)隊,,分工明細(xì),,服務(wù)貼心,,為廣大用戶提供滿意的服務(wù)。
- 上海大型防爆卷揚機生產(chǎn) 2025-06-05
- 安徽工業(yè)防爆卷揚機生產(chǎn)商 2025-06-05
- 南京自動化防爆卷揚機供應(yīng)商 2025-06-05
- 南京多功能防爆卷揚機價格 2025-06-05
- 蘇州智能防爆卷揚機報價 2025-06-05
- 防爆卷揚機價格 2025-06-05
- 武漢電動防爆卷揚機 2025-06-05
- 大型防爆卷揚機定制 2025-06-05
- 蘇州國內(nèi)防爆卷揚機生產(chǎn) 2025-06-05
- 金華固定防爆卷揚機 2025-06-05
- 河北使用防爆噴粉房 2025-06-05
- 安徽進(jìn)口灌膠機 2025-06-05
- 北京進(jìn)口變頻器維修維修電話 2025-06-05
- 深圳齒輪廠商 2025-06-05
- 浙江倉庫月臺韌性防撞護(hù)欄 2025-06-05
- 海南松花蛋包裝機 2025-06-05
- 吳江區(qū)小型彎管咨詢問價 2025-06-05
- 靜安區(qū)小型鋼絞線 2025-06-05
- 宣城頂管機減速機生產(chǎn)廠家 2025-06-05
- 佛山強吸力鼓風(fēng)機 2025-06-05