-
全自動金相切割機的切割精度與穩(wěn)定性分析-全自動金相切割機
-
全自動顯微維氏硬度計在電子元器件檢測中的重要作用
-
全自動顯微維氏硬度計:提高材料質(zhì)量評估的關鍵工具
-
全自動維氏硬度計對現(xiàn)代制造業(yè)的影響?-全自動維氏硬度計
-
跨越傳統(tǒng)界限:全自動顯微維氏硬度計在復合材料檢測中的應用探索
-
從原理到實踐:深入了解全自動顯微維氏硬度計的工作原理
-
全自動金相切割機在半導體行業(yè)的應用前景-全自動金相切割機
-
全自動金相切割機的工作原理及優(yōu)勢解析-全自動金相切割機
-
全自動洛氏硬度計在材料科學研究中的應用?-全自動洛氏硬度計
-
全自動維氏硬度計在我國市場的發(fā)展現(xiàn)狀及展望-全自動維氏硬度計
吉林電動桁架機械手
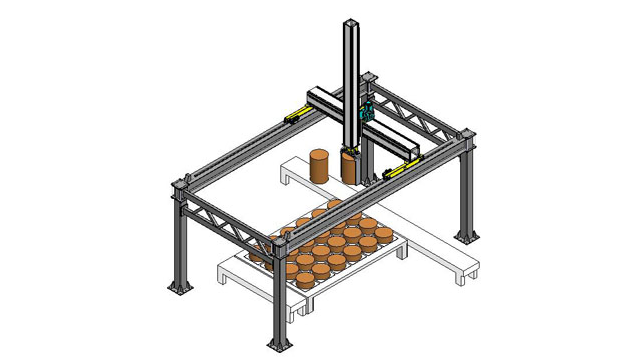
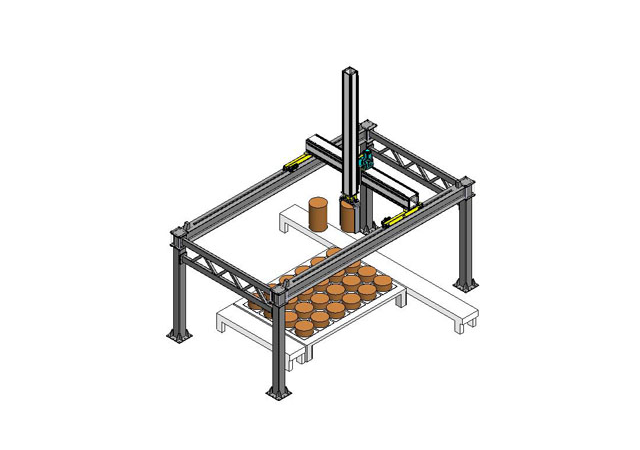
產(chǎn)品簡介:一、桁架機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導電系統(tǒng)及控制系統(tǒng)等組成。二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應;2.連續(xù)工作時間長,;3.定位精度可達0.02mm,;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,; 5.各機構(gòu)均設有限位裝置(機電雙限位),、剎車裝置、超載極限保護裝置,;6.氣動抓取機械手設有斷氣保護裝置,,防超程裝置等;7.誤操作保護裝置,。桁架機械手,,質(zhì)量優(yōu),性能好,,南京高銳特機械產(chǎn)品,;吉林電動桁架機械手
產(chǎn)品簡介:一、桁架機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導電系統(tǒng)及控制系統(tǒng)等組成。二,、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應;2.連續(xù)工作時間長,;3.定位精度可達0.02mm,;4.重型工件的碼垛、 上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,;5.各機構(gòu)均設有限位裝置(機電雙限位),、剎車裝置、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,,防超程裝置等,;7.誤操作保護裝置。浦口區(qū)電動桁架機械手桁架機械手,,質(zhì)量優(yōu),,性能佳,南京高銳特公司,;
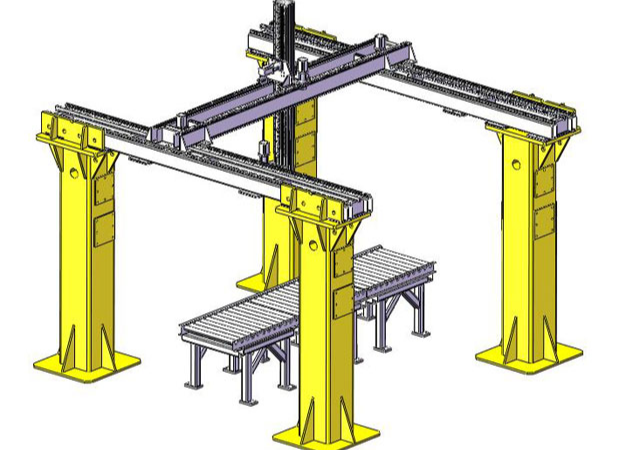
一,、桁架機械手產(chǎn)品構(gòu)成:桁架機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu),、Y軸運行機構(gòu),、Z軸升降機構(gòu)、抓取機械手,、導電系統(tǒng)及控制系統(tǒng)等組成,;X軸方向運行機構(gòu),采用齒輪細條傳動,,傳感器檢測元件+機械限位,;Z軸方向運行機構(gòu),采用全封閉減速電機角型輪傳動+齒輪齒條傳動,,傳感器檢測元件+機械限位,;Y軸方向升降機構(gòu),采用帶式傳動,,傳感器檢測元件+機械限位,;氣動抓取機械手,采用雙爪氣動動力裝置,,實現(xiàn)機械手的開閉,,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位,;控制系統(tǒng),, 通過PLC全自動控制,采集各傳感器或按鈕的輸入信號,,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行,。
產(chǎn)品簡介:一、桁架機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架,、X軸運行機構(gòu),、Y軸運行機構(gòu)、Z軸升降機構(gòu),、抓取機械手,、導電系統(tǒng)及控制系統(tǒng)等組成,。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應,;2.連續(xù)工作時間長,; 3.定位精度可達0.02mm,;4.重型工件的碼垛、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運,;5.各機構(gòu)均設有限位裝置(機電雙限位),、剎車裝置、超載極限保護裝置,;6.氣動抓取機械手設有斷氣保護裝置,,防超程裝置等;7.誤操作保護裝置,。桁架機械手,,質(zhì)量優(yōu),南京高銳特產(chǎn)品,;
一,、桁架機械手產(chǎn)品構(gòu)成:桁架機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu),、Y軸運行機構(gòu),、Z軸升降機構(gòu)、抓取機械手,、導電系統(tǒng)及控制系統(tǒng)等組成,;X軸方向運行機構(gòu),采用齒輪細條傳動,,傳感器檢測元件+機械限位,;Z軸方向運行機構(gòu), 采用全封閉減速電機角型輪傳動+齒輪齒條傳動,,傳感器檢測元件+機械限位,;Y軸方向升降機構(gòu),采用帶式傳動,,傳感器檢測元件+機械限位,;氣動抓取機械手,采用雙爪氣動動力裝置,,實現(xiàn)機械手的開閉,,爪指采用內(nèi)爪式,傳感器檢測元件+機械限位,;控制系統(tǒng),,通過PLC全自動控制,,采集各傳感器或按鈕的輸入信號,發(fā)送指令給個執(zhí)行元件按既定動作去執(zhí)行,。桁架機械手,,三坐標機械手,性能佳,,質(zhì)量好,,南京高銳特起重機械有限公司;雨花臺區(qū)桁架機械手怎么選
桁架機械手,,質(zhì)量優(yōu),,性能好,南京高銳特起重產(chǎn)品,;吉林電動桁架機械手
產(chǎn)品簡介:一,、桁架機械手簡介:三坐標搬運機械手由鋼結(jié)構(gòu)架、X軸運行機構(gòu),、Y軸運行機構(gòu),、Z軸升降機構(gòu)、抓取機械手,、導電系統(tǒng)及控制系統(tǒng)等組成,。二、產(chǎn)品特點:1.各軸方向以極高的速度直線運行,,可用伺服電機快速響應,;2.連續(xù)工作時間長; 3.定位精度可達0.02mm,;4.重型工件的碼垛,、上下料及工件的翻轉(zhuǎn)(如果需要)的搬運;5.各機構(gòu)均設有限位裝置(機電雙限位),、剎車裝置,、超載極限保護裝置;6.氣動抓取機械手設有斷氣保護裝置,,防超程裝置等,;7.誤操作保護裝置。吉林電動桁架機械手
- 南京自動化防爆卷揚機供應商 2025-06-05
- 蘇州智能防爆卷揚機報價 2025-06-05
- 杭州小型防爆卷揚機生產(chǎn)商 2025-06-05
- 江蘇直銷防爆卷揚機廠家 2025-06-05
- 溫州自制防爆卷揚機 2025-06-05
- 上海礦井防爆卷揚機價格 2025-06-04
- 安徽直銷防爆卷揚機價格 2025-06-04
- 河南電動防爆卷揚機價格 2025-06-04
- 杭州自動防爆卷揚機哪家好 2025-06-04
- 定制防爆卷揚機生產(chǎn)商 2025-06-04
- 江蘇氫水現(xiàn)貨直發(fā) 2025-06-05
- 梁溪區(qū)銷售隔膜廂式壓濾機推薦貨源 2025-06-05
- 太陽能電池太陽模擬系統(tǒng) 2025-06-05
- 宜春自動固化室 2025-06-05
- 國產(chǎn)大型機械設備裝卸誠信合作 2025-06-05
- 安徽塑料去毛刺機價格 2025-06-05
- 山東表面處理設備型號 2025-06-05
- 安陽活性炭噸袋投料 2025-06-05
- 深圳國內(nèi)無刷定轉(zhuǎn)子鐵芯 2025-06-05
- 福州教學設備購買 2025-06-05