變流器算法評估企業(yè)
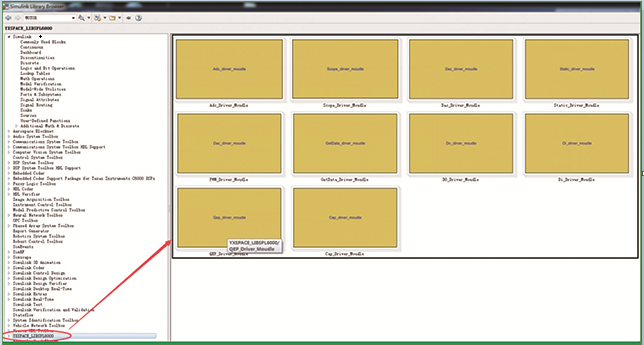
快速原型控制器具有易于聯(lián)調(diào)的優(yōu)勢,。在研發(fā)過程中,科研人員需要實(shí)時監(jiān)測控制算法的運(yùn)行狀態(tài),,并根據(jù)實(shí)際情況進(jìn)行在線調(diào)參,。傳統(tǒng)的開發(fā)方式往往難以實(shí)現(xiàn)這一點(diǎn),而RCP則提供了實(shí)時監(jiān)測和在線調(diào)參的功能,,使得科研人員能夠及時發(fā)現(xiàn)控制算法中存在的問題,,并進(jìn)行快速調(diào)整和優(yōu)化,。這不僅提高了研發(fā)的效率,也保證了控制算法的穩(wěn)定性和可靠性,??焖僭涂刂破鬟€具有高度的靈活性。由于RCP平臺性能強(qiáng)大,、資源豐富,,因此能夠滿足多個項(xiàng)目的研發(fā)需求。無論是對于簡單的控制任務(wù)還是復(fù)雜的控制算法,,RCP都能夠提供高效的解決方案,。此外,RCP還支持多種不同的處理單元和硬件架構(gòu),,使得科研人員能夠根據(jù)實(shí)際需求靈活選擇配置,,進(jìn)一步提高了研發(fā)的靈活性和便利性??焖僭涂刂破髂軌蛟谀P椭姓{(diào)用驅(qū)動模塊,,就可以將模型與硬件對應(yīng)起來。變流器算法評估企業(yè)

高靈活快速原型控制器具備快速響應(yīng)和高效執(zhí)行的能力,。其內(nèi)部采用先進(jìn)的控制算法和高速運(yùn)算處理器,,使得控制器能夠迅速接收并處理來自傳感器或其他輸入設(shè)備的數(shù)據(jù)。同時,,控制器通過精確的控制策略,,能夠?qū)崿F(xiàn)對執(zhí)行機(jī)構(gòu)的快速、準(zhǔn)確驅(qū)動,,從而提高整個生產(chǎn)過程的效率,。這種高效執(zhí)行能力使得高靈活快速原型控制器在應(yīng)對復(fù)雜多變的制造任務(wù)時,能夠保持穩(wěn)定的性能,,確保生產(chǎn)過程的順利進(jìn)行,。高靈活快速原型控制器的另一個明顯優(yōu)點(diǎn)是高度靈活性和可配置性??刂破髦С侄喾N不同的輸入和輸出設(shè)備,,可以根據(jù)具體的應(yīng)用場景和需求進(jìn)行靈活配置。此外,,控制器還提供了豐富的編程接口和工具,,使得用戶可以根據(jù)實(shí)際需要對控制器進(jìn)行編程和定制,以滿足個性化的控制需求,。這種高度的靈活性和可配置性使得高靈活快速原型控制器能夠適用于各種不同的制造場景和任務(wù),,為企業(yè)提供了更普遍的選擇空間。電機(jī)控制算法評估型號快速原型控制器通常采用模塊化的設(shè)計(jì),,使得用戶可以根據(jù)實(shí)際需求靈活配置硬件和軟件資源,。
模塊化快速原型控制器的一個優(yōu)點(diǎn)是其強(qiáng)大的擴(kuò)展性,。由于采用模塊化設(shè)計(jì),控制器可以方便地添加新的功能模塊或擴(kuò)展接口,,以適應(yīng)不同的應(yīng)用場景,。這種擴(kuò)展性使得控制器能夠普遍應(yīng)用于各種制造業(yè)領(lǐng)域,如汽車制造,、電子制造,、機(jī)械制造等。在汽車制造領(lǐng)域,,模塊化快速原型控制器可用于實(shí)現(xiàn)控制算法的快速迭代評估,。通過添加特定的功能模塊和接口,控制器可以與生產(chǎn)線上的各種設(shè)備進(jìn)行無縫對接,,實(shí)現(xiàn)自動化生產(chǎn)過程中的精確控制和協(xié)調(diào),。這種應(yīng)用不僅提高了開發(fā)效率,還降低了測試成本,。
快速原型控制器支持實(shí)時監(jiān)測和在線調(diào)參功能,。這意味著在開發(fā)過程中,開發(fā)者可以實(shí)時觀察控制器的運(yùn)行狀態(tài)和參數(shù)變化,,從而快速發(fā)現(xiàn)控制算法中存在的問題,。同時,通過在線調(diào)參功能,,開發(fā)者可以方便地調(diào)整控制參數(shù),,優(yōu)化控制效果。這種實(shí)時監(jiān)測和在線調(diào)參的能力提高了開發(fā)效率和調(diào)試的便捷性,??焖僭涂刂破骶哂懈叨鹊撵`活性,能夠適應(yīng)多種應(yīng)用場景的需求,。無論是三維打印機(jī),、CNC加工中心還是激光快速成型機(jī)等設(shè)備,都可以通過快速原型控制器實(shí)現(xiàn)數(shù)字信號控制和指令解碼,,實(shí)現(xiàn)快速原型的制造,。此外,快速原型控制器還可以應(yīng)用于自動駕駛車輛,、車輛穩(wěn)定性控制,、混合動力/純電動整車控制等領(lǐng)域,滿足各種復(fù)雜控制需求,??焖僭涂刂破骶哂锌焖夙憫?yīng)的特性,能夠?yàn)槌绦騿T縮短編碼的時間,。

快速控制原型(RCP)產(chǎn)品的適用性——在控制器的研發(fā)和生產(chǎn)中,,傳統(tǒng)基于DSP芯片自制PCB控制板的開發(fā)方式存在周期長,自制硬件可靠性差等問題,。利用快速控制原型這樣高效的研發(fā)工具,,可以減少用戶研發(fā)或?qū)W習(xí)階段在代碼轉(zhuǎn)譯、硬件定制,、調(diào)試等方面花費(fèi)的時間,。通過快速控制原型仿真器將算法快速下載實(shí)現(xiàn)后,即可控制實(shí)際對象聯(lián)調(diào)與測試,。相比于傳統(tǒng)在離線數(shù)字仿真后,,將算法通過C語言下載到控制板的方式,RCP的方法有如下優(yōu)勢——易于部署:控制算法直接部署,,減少底層開發(fā)負(fù)擔(dān),。易于聯(lián)調(diào):實(shí)時監(jiān)測、在線調(diào)參,,快速發(fā)現(xiàn)控制算法中存在的問題,。靈活性高:平臺性能強(qiáng),資源豐富,,能夠滿足多個項(xiàng)目的研發(fā)需求,。借助先進(jìn)的算法和精確的傳感器,快速原型控制器能夠?qū)崿F(xiàn)高精度的控制和監(jiān)測,。變流器算法評估參考價(jià)
快速原型控制器采用標(biāo)準(zhǔn)化接口和協(xié)議,,能夠與其他標(biāo)準(zhǔn)設(shè)備或系統(tǒng)進(jìn)行互操作,提高系統(tǒng)兼容性,。變流器算法評估企業(yè)
電機(jī)控制算法通過對電機(jī)運(yùn)動狀態(tài)的精確控制,,可以提高電機(jī)的性能。例如,,通過優(yōu)化啟動和加速過程,,可以減少電機(jī)的能耗;通過精確控制電機(jī)的轉(zhuǎn)速和轉(zhuǎn)矩,,可以提高電機(jī)的輸出效率,。此外,電機(jī)控制算法還可以實(shí)現(xiàn)電機(jī)的無級調(diào)速,,使電機(jī)在不同負(fù)載下都能保持較佳的運(yùn)行狀態(tài),。電機(jī)控制算法具有良好的穩(wěn)定性,能夠有效應(yīng)對各種干擾和突變,。在電機(jī)運(yùn)行過程中,,外部環(huán)境的變化、負(fù)載的波動等因素都可能對電機(jī)的運(yùn)行產(chǎn)生干擾。電機(jī)控制算法通過實(shí)時監(jiān)測電機(jī)的運(yùn)行狀態(tài),,調(diào)整控制參數(shù),,使電機(jī)能夠迅速適應(yīng)環(huán)境變化,保持穩(wěn)定的運(yùn)行狀態(tài),。變流器算法評估企業(yè)
- 南寧電力電子技術(shù)實(shí)驗(yàn)臺 2025-03-30
- 新疆?dāng)夭娐穼?shí)驗(yàn) 2025-03-28
- 湖南高頻電力電子 2025-03-28
- 中國澳門快速原型控制器 2025-03-27
- 濟(jì)南高效電力電子 2025-03-26
- 電力電子實(shí)驗(yàn)室建設(shè)網(wǎng)上價(jià)格 2025-03-23
- 長春實(shí)時仿真機(jī) 2025-03-22
- 新疆高精度快速原型控制器 2025-03-21
- DSP代碼自動生成生產(chǎn) 2025-03-20
- 山東實(shí)時仿真系統(tǒng) 2025-03-19
- 河南BIPV光伏防水支架供應(yīng)商 2025-05-07
- 安徽高柔性拖鏈電纜生產(chǎn)廠家 2025-05-07
- 深圳智能中央空調(diào)節(jié)能控制系統(tǒng)哪家好 2025-05-07
- 黃浦區(qū)貿(mào)易品牌創(chuàng)意包裝設(shè)計(jì)設(shè)計(jì) 2025-05-07
- SWC特殊涂層處理軸承HT3 2025-05-07
- 快速雙電源SSK-606ER 2025-05-07
- 浙江機(jī)車搬遷改造 2025-05-07
- 杭州電源測試如何辦理 2025-05-07
- 藤倉航空用橡膠電纜供貨商 2025-05-07
- 松江區(qū)出口變頻器推薦貨源 2025-05-07