中國(guó)澳門快速原型控制器
仿真實(shí)訓(xùn)系統(tǒng)作為一種先進(jìn)的教育與培訓(xùn)工具,在現(xiàn)代職業(yè)技能培養(yǎng)中扮演著至關(guān)重要的角色,。它通過高度模擬真實(shí)工作場(chǎng)景,,為學(xué)員提供了一個(gè)既安全又高效的實(shí)踐平臺(tái)。在這個(gè)系統(tǒng)中,,學(xué)員可以不受時(shí)間,、地點(diǎn)及資源限制,反復(fù)練習(xí)各種復(fù)雜技能,,直至熟練掌握,。例如,,在醫(yī)療培訓(xùn)領(lǐng)域,仿真實(shí)訓(xùn)系統(tǒng)能夠模擬人體各種生理反應(yīng)和病理狀態(tài),,使醫(yī)學(xué)生能夠在接近真實(shí)的環(huán)境中練習(xí)診斷和醫(yī)治,,從而極大地提高了他們的臨床應(yīng)對(duì)能力。此外,,該系統(tǒng)還能夠根據(jù)學(xué)員的操作實(shí)時(shí)反饋,,幫助他們及時(shí)糾正錯(cuò)誤,優(yōu)化操作流程,。這種互動(dòng)式,、個(gè)性化的學(xué)習(xí)方式,不僅增強(qiáng)了學(xué)員的學(xué)習(xí)興趣和參與度,,還有效提升了培訓(xùn)效果和職業(yè)技能水平,。快速原型控制器支持多人協(xié)作和遠(yuǎn)程調(diào)試,,進(jìn)一步降低了研發(fā)過程中的人力成本和時(shí)間成本,。中國(guó)澳門快速原型控制器
大數(shù)據(jù)快速原型控制器作為現(xiàn)代工業(yè)控制與自動(dòng)化領(lǐng)域的創(chuàng)新工具,正逐漸改變著傳統(tǒng)控制系統(tǒng)的開發(fā)模式,。它集成了高性能的計(jì)算單元,,如CPU、DSP或FPGA,,以及豐富的輸入輸出接口,,使得用戶能夠?qū)⒂脠D形化高級(jí)語(yǔ)言(如Matlab/Simulink)編寫的控制算法直接下載到控制器上,進(jìn)行實(shí)時(shí)測(cè)試和驗(yàn)證,。這種控制器不僅支持大數(shù)據(jù)處理和分析,,還能在毫秒級(jí)別內(nèi)完成控制指令的傳輸和執(zhí)行,提高了控制系統(tǒng)的響應(yīng)速度和精度,。在電力電子領(lǐng)域,,大數(shù)據(jù)快速原型控制器被普遍應(yīng)用于電力電子變換器的控制算法開發(fā)和測(cè)試,其高效的電能轉(zhuǎn)換能力和對(duì)諧波的抑制效果得到了業(yè)界的普遍認(rèn)可,。此外,,該控制器還支持遠(yuǎn)程協(xié)作和調(diào)試,降低了研發(fā)過程中的人力成本和時(shí)間成本,,使得科研人員和工程師能夠更加專注于控制算法的創(chuàng)新與優(yōu)化,。昆明高可靠快速原型控制器快速原型控制器,為研發(fā)團(tuán)隊(duì)提供強(qiáng)大支持,。
電機(jī)控制算法的迭代過程,實(shí)質(zhì)上是一個(gè)不斷探索與實(shí)踐的循環(huán),。從開始的經(jīng)典PID控制,,到后來(lái)引入現(xiàn)代控制理論的多種算法,,每一次迭代都伴隨著對(duì)電機(jī)動(dòng)態(tài)特性的深入理解與建模精度的提升。在這個(gè)過程中,,科研人員不僅需要具備扎實(shí)的數(shù)學(xué)與控制理論基礎(chǔ),,還需要緊密結(jié)合實(shí)際應(yīng)用場(chǎng)景,進(jìn)行大量的實(shí)驗(yàn)驗(yàn)證與參數(shù)調(diào)優(yōu),。通過不斷試錯(cuò)與調(diào)整,,逐步逼近很好的控制策略。這種基于實(shí)踐的迭代方法,,確保了電機(jī)控制算法能夠在復(fù)雜多變的環(huán)境中保持高性能與穩(wěn)定性,。同時(shí),隨著大數(shù)據(jù)與云計(jì)算技術(shù)的發(fā)展,,電機(jī)控制算法的迭代周期正不斷縮短,,為電機(jī)的智能化、網(wǎng)絡(luò)化控制提供了更為廣闊的發(fā)展空間,。
在電力電子系統(tǒng)的快速發(fā)展中,,電力電子控制算法的迭代成為了推動(dòng)技術(shù)革新與進(jìn)步的關(guān)鍵因素。從早期的經(jīng)典控制理論,,如PID控制,,到如今普遍應(yīng)用的現(xiàn)代控制策略,如模型預(yù)測(cè)控制(MPC)和滑??刂疲⊿MC),,每一次算法的迭代都極大地提升了電力電子裝置的效率和性能。早期的PID控制算法通過簡(jiǎn)單的比例,、積分,、微分環(huán)節(jié)實(shí)現(xiàn)對(duì)系統(tǒng)的穩(wěn)定控制,但其對(duì)復(fù)雜工況的適應(yīng)性有限,。隨著計(jì)算能力的提升和數(shù)學(xué)模型的精細(xì)化,,模型預(yù)測(cè)控制算法憑借其多步預(yù)測(cè)和滾動(dòng)優(yōu)化的特點(diǎn),在新能源發(fā)電,、電動(dòng)汽車驅(qū)動(dòng)等領(lǐng)域展現(xiàn)出巨大潛力,。它不僅能有效應(yīng)對(duì)系統(tǒng)參數(shù)變化,還能在約束條件下實(shí)現(xiàn)控制,,推動(dòng)了電力電子系統(tǒng)向更高效,、更智能的方向發(fā)展??焖僭涂刂破髯鳛橐环N高效,、靈活的開發(fā)工具,受到了廣大工程師和研發(fā)人員的青睞,。
實(shí)時(shí)仿真系統(tǒng)的開發(fā)不僅局限于技術(shù)層面的突破,,它還涉及到項(xiàng)目管理,、團(tuán)隊(duì)協(xié)作以及跨學(xué)科知識(shí)的融合。一個(gè)成功的實(shí)時(shí)仿真項(xiàng)目往往需要跨領(lǐng)域的專業(yè)人士共同參與,,從需求分析到系統(tǒng)設(shè)計(jì),,再到測(cè)試驗(yàn)證,每一個(gè)環(huán)節(jié)都需要精細(xì)的規(guī)劃和嚴(yán)格的執(zhí)行,。在開發(fā)過程中,,項(xiàng)目管理者需要確保團(tuán)隊(duì)成員之間的有效溝通,及時(shí)解決技術(shù)難題,,同時(shí)保持項(xiàng)目進(jìn)度不延誤,。此外,隨著技術(shù)的不斷進(jìn)步,,實(shí)時(shí)仿真系統(tǒng)開發(fā)還需緊跟時(shí)代步伐,,不斷引入新技術(shù)和新方法以提升系統(tǒng)性能。例如,,利用云計(jì)算和大數(shù)據(jù)技術(shù)可以進(jìn)一步優(yōu)化仿真流程,,提高數(shù)據(jù)處理效率。因此,,實(shí)時(shí)仿真系統(tǒng)的開發(fā)是一個(gè)不斷迭代,、持續(xù)改進(jìn)的過程,它要求開發(fā)者具備持續(xù)學(xué)習(xí)和創(chuàng)新的能力,,以適應(yīng)不斷變化的市場(chǎng)需求和技術(shù)環(huán)境,。快速原型控制器,,讓創(chuàng)意即刻變?yōu)楝F(xiàn)實(shí),。中國(guó)澳門快速原型控制器
快速原型控制器,物聯(lián)網(wǎng)設(shè)備開發(fā)的得力助手,。中國(guó)澳門快速原型控制器
DSPACE平臺(tái)在科研和教育領(lǐng)域也扮演著重要的角色,。許多高校和研究機(jī)構(gòu)利用DSPACE進(jìn)行高級(jí)控制算法的研究和實(shí)驗(yàn)。其靈活的配置和強(qiáng)大的實(shí)時(shí)處理能力,,使得研究者能夠輕松模擬各種復(fù)雜的控制場(chǎng)景,,從而加速科研進(jìn)度。同時(shí),,DSPACE的直觀界面和豐富的文檔資源,,也為教學(xué)工作提供了極大的便利。學(xué)生可以通過DSPACE平臺(tái),,將理論知識(shí)與實(shí)踐操作緊密結(jié)合,,深入理解控制系統(tǒng)的設(shè)計(jì)和實(shí)現(xiàn)過程。這種理論與實(shí)踐相結(jié)合的教學(xué)模式,不僅提高了學(xué)生的動(dòng)手能力,,還培養(yǎng)了他們的創(chuàng)新思維和解決問題的能力,。因此,,DSPACE平臺(tái)成為了科研和教育領(lǐng)域不可或缺的重要工具,。中國(guó)澳門快速原型控制器
- 南寧電力電子技術(shù)實(shí)驗(yàn)臺(tái) 2025-03-30
- 新疆?dāng)夭娐穼?shí)驗(yàn) 2025-03-28
- 湖南高頻電力電子 2025-03-28
- 中國(guó)澳門快速原型控制器 2025-03-27
- 濟(jì)南高效電力電子 2025-03-26
- 電力電子實(shí)驗(yàn)室建設(shè)網(wǎng)上價(jià)格 2025-03-23
- 長(zhǎng)春實(shí)時(shí)仿真機(jī) 2025-03-22
- 新疆高精度快速原型控制器 2025-03-21
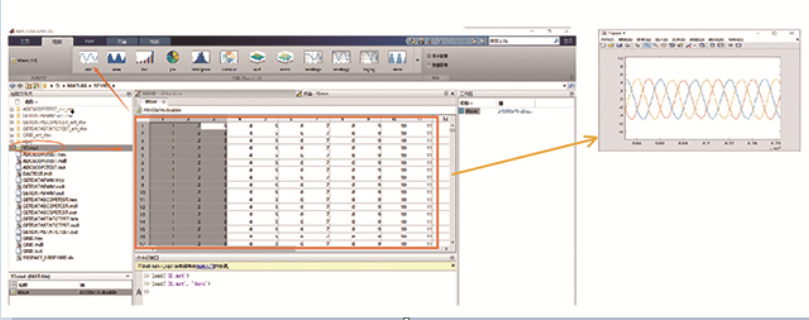
- DSP代碼自動(dòng)生成生產(chǎn) 2025-03-20
- 山東實(shí)時(shí)仿真系統(tǒng) 2025-03-19
- 廣東橋架抗震支架 2025-05-06
- 重慶耐高溫天然云母片生產(chǎn) 2025-05-06
- 定制PCB培訓(xùn)走線 2025-05-06
- 蘇州標(biāo)準(zhǔn)直線電機(jī)模組怎么樣 2025-05-06
- 重慶監(jiān)控液晶拼接屏哪家好 2025-05-06
- 湖北位移傳感器定做價(jià)格 2025-05-06
- 標(biāo)準(zhǔn)閥門遠(yuǎn)傳裝置品牌 2025-05-06
- 廣東醫(yī)院空調(diào)節(jié)能控制工程 2025-05-06
- 廣西住宅小區(qū)配電箱柜 2025-05-06
- 北京2C防爆控制柜廠家 2025-05-06