電力電子控制算法迭代供應(yīng)商
快速原型控制器支持實(shí)時監(jiān)測和在線調(diào)參功能,。這意味著在開發(fā)過程中,,開發(fā)者可以實(shí)時觀察控制器的運(yùn)行狀態(tài)和參數(shù)變化,從而快速發(fā)現(xiàn)控制算法中存在的問題,。同時,通過在線調(diào)參功能,,開發(fā)者可以方便地調(diào)整控制參數(shù),,優(yōu)化控制效果。這種實(shí)時監(jiān)測和在線調(diào)參的能力提高了開發(fā)效率和調(diào)試的便捷性,??焖僭涂刂破骶哂懈叨鹊撵`活性,能夠適應(yīng)多種應(yīng)用場景的需求,。無論是三維打印機(jī),、CNC加工中心還是激光快速成型機(jī)等設(shè)備,都可以通過快速原型控制器實(shí)現(xiàn)數(shù)字信號控制和指令解碼,,實(shí)現(xiàn)快速原型的制造,。此外,快速原型控制器還可以應(yīng)用于自動駕駛車輛,、車輛穩(wěn)定性控制,、混合動力/純電動整車控制等領(lǐng)域,滿足各種復(fù)雜控制需求,??焖僭涂刂破髦С侄ㄖ苹_發(fā),能夠根據(jù)客戶需求進(jìn)行個性化定制,滿足客戶的特定需求,。電力電子控制算法迭代供應(yīng)商
人工智能快速原型控制器具有模塊化,、標(biāo)準(zhǔn)化的設(shè)計(jì)特點(diǎn),使得它易于與其他系統(tǒng)進(jìn)行集成和擴(kuò)展,。用戶可以根據(jù)實(shí)際需求,,選擇適合的控制器模塊進(jìn)行組合和配置,以滿足不同控制系統(tǒng)的要求,。同時,,由于其標(biāo)準(zhǔn)化的設(shè)計(jì),使得控制器之間的通信和數(shù)據(jù)交換變得更加簡單和高效,,提高了系統(tǒng)的整體性能和可靠性,。人工智能快速原型控制器基于深度學(xué)習(xí)和神經(jīng)網(wǎng)絡(luò)等算法進(jìn)行模型訓(xùn)練和優(yōu)化。這使得它能夠不斷地學(xué)習(xí)和優(yōu)化自身的控制策略,,以更好地適應(yīng)控制對象的變化和不確定性,。與傳統(tǒng)的控制器相比,它無需手動調(diào)整控制參數(shù),,而是能夠通過自動學(xué)習(xí)來找到較優(yōu)的控制策略,,從而提高了控制效率和精度。實(shí)時仿真機(jī)平均價格快速原型控制器能夠在短時間內(nèi)完成從設(shè)計(jì)到原型的轉(zhuǎn)換,,提高了研發(fā)效率,。
大數(shù)據(jù)快速原型控制器具有高度的靈活性和可擴(kuò)展性。它可以根據(jù)企業(yè)的實(shí)際需求進(jìn)行定制,,滿足不同的業(yè)務(wù)場景和應(yīng)用需求,。同時,隨著企業(yè)業(yè)務(wù)的不斷發(fā)展和數(shù)據(jù)量的不斷增加,,大數(shù)據(jù)快速原型控制器可以方便地進(jìn)行擴(kuò)展和升級,,確保系統(tǒng)的穩(wěn)定性和可靠性。傳統(tǒng)的控制系統(tǒng)開發(fā)往往需要投入大量的人力,、物力和時間,,而且存在較高的風(fēng)險。而大數(shù)據(jù)快速原型控制器采用快速原型開發(fā)的方法,,能夠在短時間內(nèi)構(gòu)建出系統(tǒng)的原型,,并進(jìn)行驗(yàn)證和優(yōu)化。這種方法降低了開發(fā)成本和風(fēng)險,,提高了開發(fā)效率和質(zhì)量,。
高精度快速原型控制器采用了先進(jìn)的快速控制原型技術(shù),,將傳統(tǒng)控制器設(shè)計(jì)的彼此分離的階段進(jìn)行了一體的整合,。在一體環(huán)境中,工程師可以完成控制法則的設(shè)計(jì)及模擬、控制模型的程式碼生成等工作,,從而有效地解決了傳統(tǒng)控制器設(shè)計(jì)周期長,、效率低下的問題。這種一體化的設(shè)計(jì)方式縮短了研發(fā)周期,,提高了研發(fā)效率,。工程師們無需再花費(fèi)大量時間在代碼轉(zhuǎn)譯、硬件定制,、調(diào)試等方面,,而是可以直接通過快速控制原型仿真器將算法快速下載實(shí)現(xiàn),控制實(shí)際對象進(jìn)行聯(lián)調(diào)與測試,。這不僅減少了研發(fā)成本,,還提高了產(chǎn)品的市場競爭力??焖僭涂刂破鲃t通過集成化的硬件和軟件平臺,,實(shí)現(xiàn)了算法與硬件的快速集成和測試,從而縮短了研發(fā)周期,。

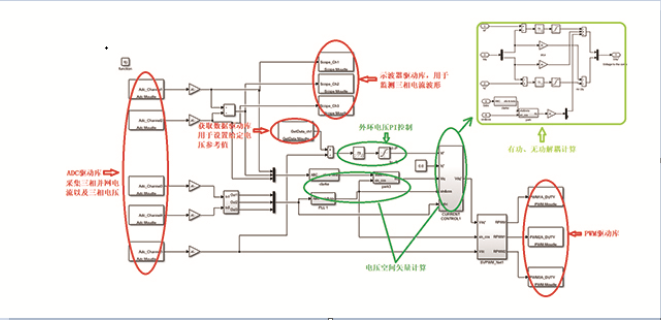
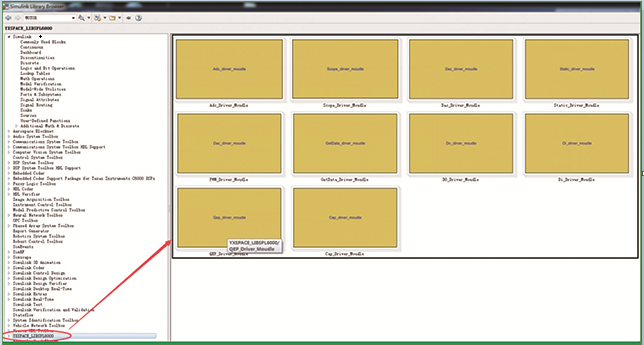
傳統(tǒng)的控制器研發(fā)過程往往涉及硬件設(shè)計(jì),、電路制作、代碼編寫,、調(diào)試等多個環(huán)節(jié),,不僅耗時耗力,而且容易在各個環(huán)節(jié)中出現(xiàn)問題,,導(dǎo)致研發(fā)周期延長,。而快速原型控制器則通過集成化的硬件和軟件平臺,實(shí)現(xiàn)了算法與硬件的快速集成和測試,,從而縮短了研發(fā)周期,。具體來說,快速原型控制器支持用戶在高級編程語言(如Matlab/Simulink)中設(shè)計(jì)控制算法,,并通過自動代碼生成技術(shù)將算法轉(zhuǎn)換為可在控制器上運(yùn)行的代碼,。這一過程避免了繁瑣的底層編程和調(diào)試工作,使得用戶能夠更專注于控制算法的設(shè)計(jì)和優(yōu)化,。同時,,快速原型控制器還提供了豐富的外設(shè)接口和調(diào)試工具,方便用戶進(jìn)行硬件接口的連接和調(diào)試,,進(jìn)一步提高了研發(fā)效率,。由于快速原型控制器能夠縮短研發(fā)周期、提高研發(fā)效率,,因此可以明顯降低研發(fā)成本,。河北免硬件代碼開發(fā)
高可靠快速原型控制器具備代碼一鍵生成,、算法高效迭代、性能快速評估,。電力電子控制算法迭代供應(yīng)商
高靈活快速原型控制器具備高精度和高穩(wěn)定性的優(yōu)點(diǎn),。控制器采用先進(jìn)的控制算法和精確的控制策略,,能夠?qū)崿F(xiàn)對執(zhí)行機(jī)構(gòu)的精確控制,,從而提高產(chǎn)品的制造精度和質(zhì)量。同時,,控制器還具備強(qiáng)大的抗干擾能力,,能夠在復(fù)雜多變的工作環(huán)境中保持穩(wěn)定的性能,確保生產(chǎn)過程的可靠性和穩(wěn)定性,。這種高精度和高穩(wěn)定性的特點(diǎn)使得高靈活快速原型控制器在制造業(yè)中得到了普遍的應(yīng)用,。高靈活快速原型控制器還具有易于集成和維護(hù)的特點(diǎn)??刂破鞑捎昧藰?biāo)準(zhǔn)化的接口和通信協(xié)議,,可以方便地與其他設(shè)備和系統(tǒng)進(jìn)行集成。同時,,控制器還提供了豐富的故障診斷和報(bào)警功能,,使得用戶能夠及時發(fā)現(xiàn)和處理設(shè)備故障,降低維護(hù)成本,。此外,,控制器的模塊化設(shè)計(jì)使得維護(hù)和升級變得更加簡單方便,提高了設(shè)備的可維護(hù)性和可靠性,。電力電子控制算法迭代供應(yīng)商
- 南寧電力電子技術(shù)實(shí)驗(yàn)臺 2025-03-30
- 新疆?dāng)夭娐穼?shí)驗(yàn) 2025-03-28
- 湖南高頻電力電子 2025-03-28
- 中國澳門快速原型控制器 2025-03-27
- 濟(jì)南高效電力電子 2025-03-26
- 電力電子實(shí)驗(yàn)室建設(shè)網(wǎng)上價格 2025-03-23
- 長春實(shí)時仿真機(jī) 2025-03-22
- 新疆高精度快速原型控制器 2025-03-21
- DSP代碼自動生成生產(chǎn) 2025-03-20
- 山東實(shí)時仿真系統(tǒng) 2025-03-19
- 長寧區(qū)綠色業(yè)務(wù)外包服務(wù)結(jié)構(gòu) 2025-05-08
- 濟(jì)南梯式橋架價錢 2025-05-08
- 山東高柔性拖鏈電纜生產(chǎn)廠家 2025-05-08
- 北京永磁矢量永磁無刷驅(qū)動器推薦廠家 2025-05-08
- 宿遷機(jī)電不銹鋼換熱設(shè)備性能 2025-05-08
- 浙江真空有載分接開關(guān)價格 2025-05-08
- 淮安卷筒電纜什么價格 2025-05-08
- 河南led高清廣告機(jī)廠家有哪些 2025-05-08
- 西安特色音響批量定制 2025-05-08
- 崇明區(qū)進(jìn)口雙色門頭屏報(bào)價 2025-05-08