-
溫始地送風(fēng)風(fēng)盤 —— 革新家居空氣享受的藝術(shù)品
-
溫始·未來生活新定義 —— 智能調(diào)濕新風(fēng)機
-
秋季舒適室內(nèi)感,五恒系統(tǒng)如何做到?
-
大眾對五恒系統(tǒng)的常見問題解答,?
-
五恒空調(diào)系統(tǒng)基本概要
-
如何締造一個舒適的室內(nèi)生態(tài)氣候系統(tǒng)
-
舒適室內(nèi)環(huán)境除濕的意義
-
暖通發(fā)展至今,,怎樣選擇當(dāng)下產(chǎn)品
-
怎樣的空調(diào)系統(tǒng)ZUi值得你的選擇,?
-
五恒系統(tǒng)下的門窗藝術(shù):打造高效節(jié)能與舒適并存的居住空間
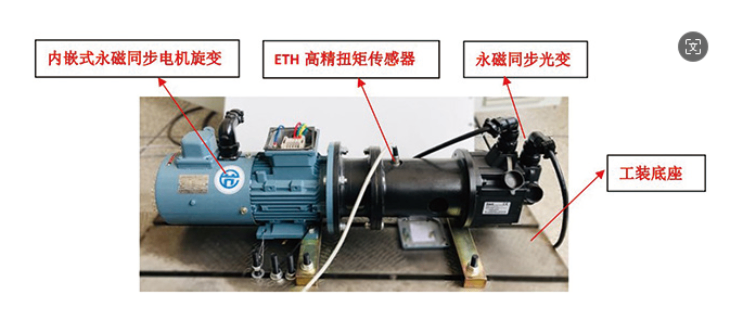
合肥小功率電機實驗平臺
在工業(yè)自動化領(lǐng)域,有刷直流電機的閉環(huán)控制系統(tǒng)扮演著至關(guān)重要的角色,。該系統(tǒng)通過集成傳感器(如編碼器或霍爾傳感器)實時監(jiān)測電機的轉(zhuǎn)速,、位置或電流等關(guān)鍵參數(shù),并將這些反饋信號與預(yù)設(shè)的期望值進行比較,。一旦檢測到偏差,,控制系統(tǒng)就會迅速響應(yīng),通過調(diào)整電機的輸入電壓或電流來糾正偏差,,從而實現(xiàn)精確控制,。這種閉環(huán)機制確保了電機運行的穩(wěn)定性和準確性,即使在負載變化或外部環(huán)境干擾的情況下,,也能保持優(yōu)異的動態(tài)性能和穩(wěn)態(tài)精度?,F(xiàn)代有刷直流電機閉環(huán)控制系統(tǒng)還常采用先進的控制算法,如PID控制,、模糊控制或神經(jīng)網(wǎng)絡(luò)控制等,,以進一步提升控制效果和響應(yīng)速度,滿足復(fù)雜多變的工業(yè)應(yīng)用需求,。因此,,有刷直流電機的閉環(huán)控制技術(shù)不僅是提升生產(chǎn)效率、保障產(chǎn)品質(zhì)量的重要手段,,也是推動工業(yè)自動化向更高層次發(fā)展的重要驅(qū)動力,。電機節(jié)能控制還有助于提高生產(chǎn)過程的穩(wěn)定性。合肥小功率電機實驗平臺
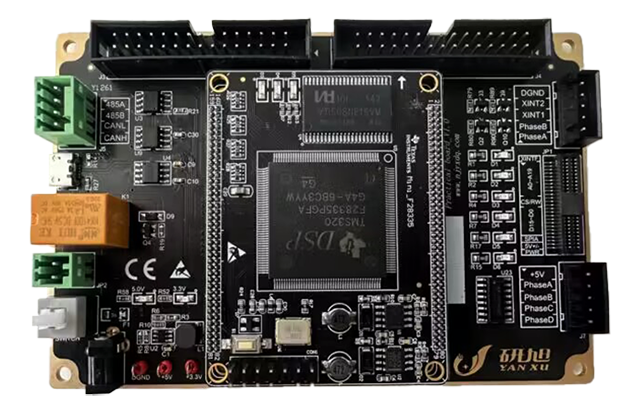
直流電機控制是現(xiàn)代工業(yè)自動化領(lǐng)域中至關(guān)重要的一個環(huán)節(jié),,它涉及到將電能高效地轉(zhuǎn)化為機械能的過程,。在控制系統(tǒng)中,直流電機因其良好的調(diào)速性能和轉(zhuǎn)矩特性而得到普遍應(yīng)用,。通過調(diào)節(jié)電機輸入電壓的大小或改變電樞回路的電阻,,可以實現(xiàn)對直流電機轉(zhuǎn)速的精確控制。隨著電子技術(shù)和控制理論的發(fā)展,,采用PWM(脈沖寬度調(diào)制)技術(shù)控制電機驅(qū)動電壓的占空比,已成為直流電機調(diào)速的主流方法,。這種方法不僅提高了調(diào)速精度和動態(tài)響應(yīng)速度,,還降低了能耗和發(fā)熱。在復(fù)雜的應(yīng)用場景中,,如機器人關(guān)節(jié)驅(qū)動,、自動化生產(chǎn)線上的物料傳輸?shù)?,直流電機控制系統(tǒng)還需集成傳感器反饋機制,實現(xiàn)閉環(huán)控制,,以進一步提升控制的穩(wěn)定性和準確性,。綜上所述,直流電機控制技術(shù)的不斷進步,,正推動著工業(yè)自動化向著更加高效,、智能的方向發(fā)展。合肥小功率電機實驗平臺電機控制板設(shè)計,,確保高效散熱,。

在進行三相交流異步電機矢量控制實驗時,首先需深入理解其控制原理,,即利用坐標變換技術(shù)將三相定子電流分解為磁場定向的d軸電流和轉(zhuǎn)矩控制的q軸電流,,實現(xiàn)電機磁通與轉(zhuǎn)矩的解耦控制。實驗中,,通過高精度傳感器獲取電機的轉(zhuǎn)速,、電流及位置反饋信號,并送入數(shù)字信號處理器(DSP)或可編程邏輯控制器(PLC)中進行實時計算,。隨后,,根據(jù)預(yù)設(shè)的控制算法(如id=0控制、較大轉(zhuǎn)矩電流比控制等),,調(diào)整逆變器輸出的電壓矢量,,精確控制d、q軸電流,,以達到對電機轉(zhuǎn)速,、轉(zhuǎn)矩及磁通的單獨調(diào)節(jié)。實驗過程中,,還需關(guān)注控制參數(shù)的優(yōu)化,,以確保系統(tǒng)響應(yīng)的快速性、穩(wěn)定性及精度,,同時,,還需考慮電機的非線性特性和外界擾動因素,通過引入相應(yīng)的補償策略來提高控制性能,。整個實驗不僅加深了對電機控制理論的理解,,也為實際應(yīng)用中高性能電機驅(qū)動系統(tǒng)的設(shè)計與調(diào)試提供了寶貴經(jīng)驗。
在當(dāng)今綠色發(fā)展的浪潮中,,節(jié)能電機控制技術(shù)作為推動工業(yè)轉(zhuǎn)型升級的關(guān)鍵力量,,正日益受到各行各業(yè)的普遍關(guān)注。這項技術(shù)通過優(yōu)化電機設(shè)計,、改進控制算法以及應(yīng)用先進的電力電子技術(shù),,實現(xiàn)了電機運行效率的大幅提升與能耗的明顯降低,。節(jié)能電機控制系統(tǒng)能夠根據(jù)負載變化自動調(diào)節(jié)電機轉(zhuǎn)速和功率輸出,避免傳統(tǒng)電機因長時間滿負荷運行而造成的能源浪費,。同時,,智能化的控制策略還能有效減少電機啟動時的電流沖擊,延長電機及整個系統(tǒng)的使用壽命,。隨著物聯(lián)網(wǎng),、大數(shù)據(jù)等技術(shù)的融合應(yīng)用,節(jié)能電機控制正朝著更加智能化,、自適應(yīng)的方向發(fā)展,,為工業(yè)4.0時代下的智能制造提供了強有力的支撐。未來,,隨著全球?qū)?jié)能減排要求的不斷提高,,節(jié)能電機控制技術(shù)必將在更多領(lǐng)域得到普遍應(yīng)用,為實現(xiàn)可持續(xù)發(fā)展目標貢獻重要力量,。電機控制可以根據(jù)實際需要調(diào)節(jié)電機的轉(zhuǎn)速和扭矩,,滿足不同工況下的需求。
永磁同步電機(PMSM)作為高性能電機領(lǐng)域的佼佼者,,其無位置傳感器控制技術(shù)近年來備受關(guān)注,。這項技術(shù)通過算法估算電機的轉(zhuǎn)子位置和速度,摒棄了傳統(tǒng)的機械式位置傳感器,,如編碼器或霍爾元件,,從而簡化了電機結(jié)構(gòu),降低了系統(tǒng)成本,,并提高了系統(tǒng)的可靠性和魯棒性,。在無位置傳感器控制中,重要在于準確且實時地估算電機的電磁狀態(tài),,這通常依賴于電機的電壓,、電流等電氣量以及電機的數(shù)學(xué)模型。通過先進的控制算法,,如擴展卡爾曼濾波器(EKF),、滑模觀測器(SMO)或模型參考自適應(yīng)控制(MRAC)等,能夠?qū)崿F(xiàn)對電機狀態(tài)的精確估計,,進而實現(xiàn)高精度的轉(zhuǎn)矩和速度控制,。隨著人工智能和機器學(xué)習(xí)技術(shù)的不斷發(fā)展,基于數(shù)據(jù)驅(qū)動的無位置傳感器控制方法也逐漸興起,,為永磁同步電機的智能化控制開辟了新路徑,。這些技術(shù)的應(yīng)用,不僅推動了電機控制技術(shù)的革新,,也為電動汽車,、工業(yè)自動化、航空航天等領(lǐng)域的發(fā)展注入了新的活力,。電機控制可以通過控制電機的電流和電壓的波形和頻率來實現(xiàn)電機的電磁故障控制和電磁保護控制,。昆明有刷直流電機閉環(huán)控制
通過精確控制電機的轉(zhuǎn)速和轉(zhuǎn)矩,可以避免電機過載或欠載等異常情況的發(fā)生,。合肥小功率電機實驗平臺
電機滑??刂谱鳛橐环N先進的控制策略,在電力傳動系統(tǒng),、工業(yè)機器人,、航空航天以及電動汽車等領(lǐng)域展現(xiàn)出了其獨特的優(yōu)勢。它通過設(shè)計一種特定的滑模面,,使得系統(tǒng)狀態(tài)在受到外部干擾或參數(shù)變化時,,能夠迅速且穩(wěn)定地滑動到這個預(yù)定的滑模面上,并沿著該面運動直至達到控制目標,。這種控制方法的關(guān)鍵在于其不變性原理,,即一旦系統(tǒng)狀態(tài)進入滑模狀態(tài),其后續(xù)動態(tài)將只由滑模面的設(shè)計決定,,而與系統(tǒng)參數(shù)及外部擾動無關(guān),,從而提高了控制系統(tǒng)的魯棒性和抗干擾能力。在實際應(yīng)用中,,電機滑??刂颇軌蛴行?yīng)對負載變化、模型不確定性及非線性特性等問題,,確保電機在高精度,、高動態(tài)性能要求下的穩(wěn)定運行,是推動工業(yè)自動化與智能化發(fā)展的重要技術(shù)之一,。合肥小功率電機實驗平臺
- 南寧電力電子技術(shù)實驗臺 2025-03-30
- 新疆?dāng)夭娐穼嶒?/a> 2025-03-28
- 湖南高頻電力電子 2025-03-28
- 中國澳門快速原型控制器 2025-03-27
- 濟南高效電力電子 2025-03-26
- 電力電子實驗室建設(shè)網(wǎng)上價格 2025-03-23
- 長春實時仿真機 2025-03-22
- 新疆高精度快速原型控制器 2025-03-21
- DSP代碼自動生成生產(chǎn) 2025-03-20
- 山東實時仿真系統(tǒng) 2025-03-19
- 南京污水處理廠加氯機價格 2025-05-30
- 西安220VUL認證變壓器定制 2025-05-30
- 福田區(qū)6路充電樁加盟費 2025-05-30
- 寶雞充氣式配電柜電話 2025-05-30
- 嘉定區(qū)品牌樓宇安全監(jiān)控系統(tǒng)修復(fù) 2025-05-30
- 南京電機和動力總成生產(chǎn)下線NVH測試噪音 2025-05-30
- 深圳PAUL-150WS開關(guān)電源定制價格 2025-05-30
- 嘉定區(qū)如何熔斷器廠家現(xiàn)貨 2025-05-30
- 西寧光纖測井光纜價格 2025-05-30
- 深圳電力廠余氯分析儀供應(yīng)商推薦 2025-05-30