-
溫始地送風(fēng)風(fēng)盤 —— 革新家居空氣享受的藝術(shù)品
-
溫始·未來(lái)生活新定義 —— 智能調(diào)濕新風(fēng)機(jī)
-
秋季舒適室內(nèi)感,,五恒系統(tǒng)如何做到,?
-
大眾對(duì)五恒系統(tǒng)的常見問題解答?
-
五恒空調(diào)系統(tǒng)基本概要
-
如何締造一個(gè)舒適的室內(nèi)生態(tài)氣候系統(tǒng)
-
舒適室內(nèi)環(huán)境除濕的意義
-
暖通發(fā)展至今,,怎樣選擇當(dāng)下產(chǎn)品
-
怎樣的空調(diào)系統(tǒng)ZUi值得你的選擇?
-
五恒系統(tǒng)下的門窗藝術(shù):打造高效節(jié)能與舒適并存的居住空間
湖南集成化電機(jī)控制
電機(jī)滑??刂谱鳛橐环N先進(jìn)的控制策略,,在電力傳動(dòng)系統(tǒng)、工業(yè)機(jī)器人,、航空航天以及電動(dòng)汽車等領(lǐng)域展現(xiàn)出了其獨(dú)特的優(yōu)勢(shì),。它通過設(shè)計(jì)一種特定的滑模面,使得系統(tǒng)狀態(tài)在受到外部干擾或參數(shù)變化時(shí),,能夠迅速且穩(wěn)定地滑動(dòng)到這個(gè)預(yù)定的滑模面上,,并沿著該面運(yùn)動(dòng)直至達(dá)到控制目標(biāo)。這種控制方法的關(guān)鍵在于其不變性原理,,即一旦系統(tǒng)狀態(tài)進(jìn)入滑模狀態(tài),,其后續(xù)動(dòng)態(tài)將只由滑模面的設(shè)計(jì)決定,而與系統(tǒng)參數(shù)及外部擾動(dòng)無(wú)關(guān),,從而提高了控制系統(tǒng)的魯棒性和抗干擾能力,。在實(shí)際應(yīng)用中,電機(jī)滑??刂颇軌蛴行?yīng)對(duì)負(fù)載變化,、模型不確定性及非線性特性等問題,確保電機(jī)在高精度,、高動(dòng)態(tài)性能要求下的穩(wěn)定運(yùn)行,,是推動(dòng)工業(yè)自動(dòng)化與智能化發(fā)展的重要技術(shù)之一。電機(jī)對(duì)拖控制的基本原理是通過調(diào)整加載裝置的輸出,,使其與電機(jī)的輸入相匹配,。湖南集成化電機(jī)控制
電機(jī)FOC(Field-Oriented Control,磁場(chǎng)定向控制)控制,,又稱矢量控制,,是電機(jī)控制領(lǐng)域的一項(xiàng)重要技術(shù)。它通過控制變頻器輸出電壓的幅值和頻率,,實(shí)現(xiàn)對(duì)三相直流無(wú)刷電機(jī)的精確變頻驅(qū)動(dòng),。FOC的重要理念在于利用坐標(biāo)變換技術(shù),將電機(jī)在三相靜止坐標(biāo)系下的相電流轉(zhuǎn)換為與轉(zhuǎn)子磁極軸線相對(duì)靜止的旋轉(zhuǎn)坐標(biāo)系上的矢量,,進(jìn)而通過控制這些矢量的大小和方向,,實(shí)現(xiàn)對(duì)電機(jī)運(yùn)行狀態(tài)的精確控制。FOC控制方法明顯提升了電機(jī)的運(yùn)行效率和性能,。通過精確控制電機(jī)定子磁場(chǎng)的方向,,使其與轉(zhuǎn)子磁場(chǎng)保持90°夾角,F(xiàn)OC能夠在給定電流下實(shí)現(xiàn)較大轉(zhuǎn)矩輸出,,從而減少轉(zhuǎn)矩波動(dòng),,提升系統(tǒng)動(dòng)態(tài)響應(yīng)速度,并降低運(yùn)行噪聲。電機(jī)協(xié)同控制選擇電機(jī)控制硬件優(yōu)化,,降低發(fā)熱量,。

在工業(yè)自動(dòng)化與測(cè)試領(lǐng)域,電機(jī)磁粉加載控制技術(shù)扮演著至關(guān)重要的角色,。這項(xiàng)技術(shù)通過利用磁粉離合器或制動(dòng)器的特性,,實(shí)現(xiàn)對(duì)電機(jī)輸出轉(zhuǎn)矩的精確調(diào)節(jié)與控制。磁粉加載系統(tǒng)利用磁粉顆粒在磁場(chǎng)作用下的鏈化效應(yīng),,產(chǎn)生可控的摩擦阻力,,從而實(shí)現(xiàn)對(duì)電機(jī)負(fù)載的模擬與加載。這種控制方式不僅響應(yīng)速度快,、精度高,,而且能夠?qū)崿F(xiàn)無(wú)極調(diào)速與加載,非常適合用于動(dòng)態(tài)性能測(cè)試,、材料疲勞試驗(yàn)以及各類精密傳動(dòng)系統(tǒng)的研發(fā)與驗(yàn)證,。具體而言,在電機(jī)性能測(cè)試過程中,,磁粉加載控制可以根據(jù)預(yù)設(shè)的加載曲線自動(dòng)調(diào)整負(fù)載大小,,模擬實(shí)際工作環(huán)境下電機(jī)可能遇到的各種負(fù)載條件,幫助工程師全方面評(píng)估電機(jī)的性能參數(shù),,如輸出功率,、效率、溫升及耐久性等,。磁粉加載系統(tǒng)的非接觸式工作原理還確保了加載過程的平穩(wěn)與低噪音,,為高精度測(cè)量提供了良好的條件,。隨著智能制造與工業(yè)4.0的推進(jìn),,電機(jī)磁粉加載控制技術(shù)正逐步向智能化、網(wǎng)絡(luò)化方向發(fā)展,,為實(shí)現(xiàn)更高效,、更精確的電機(jī)測(cè)試與質(zhì)量控制貢獻(xiàn)力量。
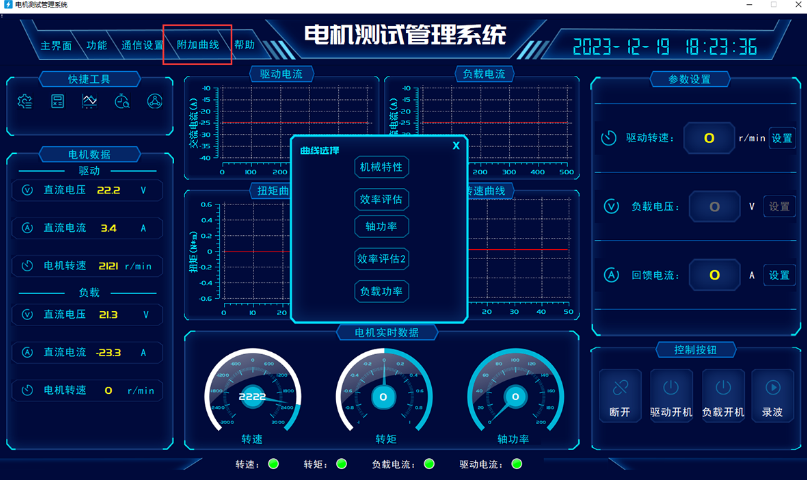
電機(jī)直流回饋測(cè)功機(jī)是現(xiàn)代電機(jī)測(cè)試領(lǐng)域中的一項(xiàng)重要設(shè)備,,它集成了高精度測(cè)量與能量回饋的雙重功能,。在電機(jī)性能測(cè)試過程中,該設(shè)備不僅能夠準(zhǔn)確模擬各種負(fù)載條件,,實(shí)時(shí)測(cè)量電機(jī)的轉(zhuǎn)矩,、轉(zhuǎn)速、功率等關(guān)鍵參數(shù),,還能將電機(jī)在測(cè)試過程中產(chǎn)生的電能通過逆變技術(shù)轉(zhuǎn)化為交流電,,再回饋給電網(wǎng)或用于其他電力負(fù)載,實(shí)現(xiàn)了能源的循環(huán)利用與節(jié)能減排。這一特性不僅降低了測(cè)試成本,,還提高了測(cè)試系統(tǒng)的整體效率,。電機(jī)直流回饋測(cè)功機(jī)采用先進(jìn)的控制算法,能夠確保測(cè)試過程的穩(wěn)定性與準(zhǔn)確性,,為電機(jī)產(chǎn)品的研發(fā),、質(zhì)量控制及性能優(yōu)化提供了強(qiáng)有力的技術(shù)支持。無(wú)論是電機(jī)制造商,、科研機(jī)構(gòu)還是高等院校,,都普遍采用這一設(shè)備來(lái)滿足其對(duì)于電機(jī)性能測(cè)試的嚴(yán)苛要求。多驅(qū)動(dòng)電機(jī)控制的可靠性是其一個(gè)重要特點(diǎn),。
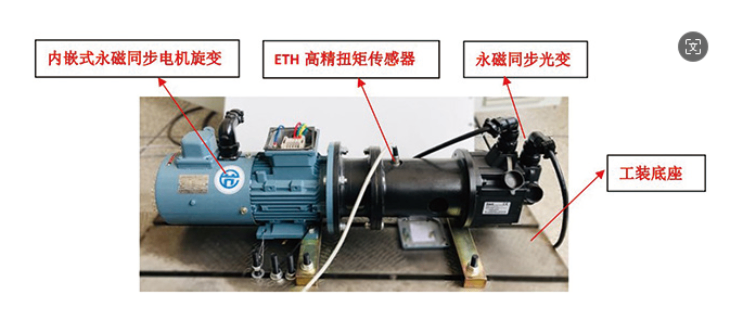
在構(gòu)建電機(jī)控制系統(tǒng)的領(lǐng)域中,,電機(jī)測(cè)速反饋控制實(shí)驗(yàn)平臺(tái)扮演著至關(guān)重要的角色。這一平臺(tái)集成了高精度的編碼器與先進(jìn)的控制算法,,旨在實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速的精確測(cè)量與即時(shí)反饋調(diào)控,。通過實(shí)時(shí)捕捉電機(jī)旋轉(zhuǎn)的位置信息,并結(jié)合內(nèi)置的解析器轉(zhuǎn)換成轉(zhuǎn)速數(shù)據(jù),,平臺(tái)能夠不受外部干擾地提供連續(xù),、可靠的速度反饋信號(hào)。實(shí)驗(yàn)者可以在此平臺(tái)上進(jìn)行多種控制策略的研究與驗(yàn)證,,如PID控制,、模糊控制或自適應(yīng)控制等,以優(yōu)化電機(jī)的動(dòng)態(tài)響應(yīng)性能,、提高位置控制的精確度及系統(tǒng)的穩(wěn)定性,。該平臺(tái)還配備了友好的人機(jī)交互界面,便于實(shí)驗(yàn)者直觀監(jiān)測(cè)各項(xiàng)參數(shù)變化,,進(jìn)行快速調(diào)試與數(shù)據(jù)分析,,為電機(jī)驅(qū)動(dòng)技術(shù)的深入研究與應(yīng)用開發(fā)提供了強(qiáng)有力的支持。電機(jī)控制軟件定制,,實(shí)現(xiàn)特定功能,。南京電機(jī)磁滯加載控制
電機(jī)對(duì)拖控制具有靈活性,能夠適應(yīng)不同的工作環(huán)境和應(yīng)用需求,。湖南集成化電機(jī)控制
在工業(yè)自動(dòng)化與精密設(shè)備領(lǐng)域,,電機(jī)振動(dòng)抑制是一個(gè)至關(guān)重要的技術(shù)挑戰(zhàn)。電機(jī)在運(yùn)行過程中,,由于內(nèi)部電磁力,、機(jī)械不平衡、軸承磨損等多種因素,,往往會(huì)產(chǎn)生不同程度的振動(dòng),,這不僅會(huì)影響設(shè)備的運(yùn)行精度,,還可能引發(fā)噪音污染,加速零部件磨損,,甚至導(dǎo)致設(shè)備故障停機(jī),。因此,實(shí)施有效的電機(jī)振動(dòng)抑制策略顯得尤為重要,。為實(shí)現(xiàn)這一目標(biāo),,工程師們通常采用多種技術(shù)手段。一方面,,通過優(yōu)化電機(jī)設(shè)計(jì),,如采用高精度平衡技術(shù)減少機(jī)械不平衡,選擇低噪音,、高剛性的軸承材料,,以及設(shè)計(jì)合理的電磁結(jié)構(gòu)以降低電磁力波動(dòng),從根本上減少振動(dòng)源,。另一方面,,引入先進(jìn)的控制算法,如自適應(yīng)控制,、模糊控制等,,實(shí)時(shí)監(jiān)測(cè)電機(jī)運(yùn)行狀態(tài)并動(dòng)態(tài)調(diào)整控制參數(shù),以實(shí)現(xiàn)對(duì)振動(dòng)的快速響應(yīng)和有效抑制,。還可以采用隔振技術(shù),,在電機(jī)與支撐結(jié)構(gòu)之間安裝減震器或隔振墊,阻斷振動(dòng)傳播路徑,,進(jìn)一步降低振動(dòng)對(duì)周圍環(huán)境的影響,。綜合運(yùn)用這些技術(shù)手段,可以明顯提升電機(jī)運(yùn)行的穩(wěn)定性和可靠性,,為工業(yè)自動(dòng)化和精密制造提供有力支撐,。湖南集成化電機(jī)控制
- 南寧電力電子技術(shù)實(shí)驗(yàn)臺(tái) 2025-03-30
- 新疆?dāng)夭娐穼?shí)驗(yàn) 2025-03-28
- 湖南高頻電力電子 2025-03-28
- 中國(guó)澳門快速原型控制器 2025-03-27
- 濟(jì)南高效電力電子 2025-03-26
- 電力電子實(shí)驗(yàn)室建設(shè)網(wǎng)上價(jià)格 2025-03-23
- 長(zhǎng)春實(shí)時(shí)仿真機(jī) 2025-03-22
- 新疆高精度快速原型控制器 2025-03-21
- DSP代碼自動(dòng)生成生產(chǎn) 2025-03-20
- 山東實(shí)時(shí)仿真系統(tǒng) 2025-03-19
- 南京污水處理廠加氯機(jī)價(jià)格 2025-05-30
- 西安220VUL認(rèn)證變壓器定制 2025-05-30
- 福田區(qū)6路充電樁加盟費(fèi) 2025-05-30
- 寶雞充氣式配電柜電話 2025-05-30
- 嘉定區(qū)品牌樓宇安全監(jiān)控系統(tǒng)修復(fù) 2025-05-30
- 南京電機(jī)和動(dòng)力總成生產(chǎn)下線NVH測(cè)試噪音 2025-05-30
- 深圳PAUL-150WS開關(guān)電源定制價(jià)格 2025-05-30
- 嘉定區(qū)如何熔斷器廠家現(xiàn)貨 2025-05-30
- 西寧光纖測(cè)井光纜價(jià)格 2025-05-30
- 深圳電力廠余氯分析儀供應(yīng)商推薦 2025-05-30