永磁同步電機(jī)費(fèi)用是多少
FOC控制還具有調(diào)速范圍廣,、控制精度高等優(yōu)點(diǎn),使其在高性能和高精度的電機(jī)控制領(lǐng)域得到普遍應(yīng)用,,如工業(yè)自動化生產(chǎn)線,、電動汽車、無人機(jī)等領(lǐng)域,。在FOC控制系統(tǒng)中,,硬件部分主要包括直流無刷電機(jī),、變頻器及相應(yīng)的傳感器等;軟件部分則涉及復(fù)雜的控制算法,,如Clark變換,、Park變換、PID控制,、SVPWM控制等,。這些算法共同協(xié)作,確保電機(jī)能夠按照預(yù)定目標(biāo)穩(wěn)定運(yùn)行,,滿足各種復(fù)雜工況下的性能要求,。同時,隨著技術(shù)的不斷發(fā)展,,F(xiàn)OC控制算法也在不斷優(yōu)化和完善,,以適應(yīng)更加多樣化的電機(jī)控制需求。電機(jī)控制可以通過控制電機(jī)的電流和電壓的波形和頻率來實(shí)現(xiàn)電機(jī)的電磁故障控制和電磁保護(hù)控制,。永磁同步電機(jī)費(fèi)用是多少
在電氣工程與自動化領(lǐng)域,,電機(jī)失磁故障實(shí)驗(yàn)平臺是一個至關(guān)重要的研究工具,它模擬了電機(jī)在運(yùn)行過程中可能遭遇的失磁現(xiàn)象,,為科研人員提供了一個直觀,、可控的實(shí)驗(yàn)環(huán)境。該平臺通常集成了高精度的傳感器,、數(shù)據(jù)采集系統(tǒng)以及可調(diào)節(jié)的磁場發(fā)生裝置,,能夠精確模擬不同工況下電機(jī)磁場的弱化乃至完全消失的過程。通過該平臺,,研究人員可以系統(tǒng)地觀察并記錄電機(jī)在失磁狀態(tài)下的性能變化,,包括轉(zhuǎn)速波動、轉(zhuǎn)矩下降,、效率降低以及可能產(chǎn)生的振動和噪聲等,,進(jìn)而深入分析失磁故障對電機(jī)運(yùn)行穩(wěn)定性的影響機(jī)制。該平臺還支持故障模擬后的恢復(fù)實(shí)驗(yàn),,驗(yàn)證不同修復(fù)策略的有效性,,為電機(jī)故障診斷與維護(hù)技術(shù)的研發(fā)提供有力支持。因此,,電機(jī)失磁故障實(shí)驗(yàn)平臺不僅促進(jìn)了電機(jī)理論研究的深入,,也推動了電機(jī)工程應(yīng)用技術(shù)的不斷進(jìn)步。大數(shù)據(jù)電機(jī)控制供應(yīng)商電機(jī)控制軟件定制,,滿足個性化需求,。
直流無刷電機(jī)控制是現(xiàn)代電機(jī)技術(shù)中的一項重要突破,它融合了電力電子技術(shù)、電機(jī)設(shè)計以及先進(jìn)的控制算法,,實(shí)現(xiàn)了高效,、低噪音與長壽命的電機(jī)運(yùn)行。在工業(yè)自動化,、家電產(chǎn)品,、電動汽車乃至無人機(jī)等眾多領(lǐng)域,直流無刷電機(jī)都展現(xiàn)出了其獨(dú)特的優(yōu)勢,??刂七@類電機(jī),關(guān)鍵在于精確調(diào)節(jié)其驅(qū)動電流,,以實(shí)現(xiàn)對轉(zhuǎn)速,、轉(zhuǎn)矩乃至位置的精確控制。通過采用霍爾傳感器或先進(jìn)的無位置傳感器技術(shù),,控制系統(tǒng)能夠?qū)崟r感知電機(jī)的運(yùn)行狀態(tài),,并據(jù)此調(diào)整PWM(脈沖寬度調(diào)制)信號的占空比,從而精確控制電機(jī)的轉(zhuǎn)速與方向,。高級的控制算法如矢量控制,、FOC(磁場定向控制)等的應(yīng)用,更是進(jìn)一步提升了直流無刷電機(jī)的動態(tài)響應(yīng)能力和運(yùn)行效率,,為各類智能設(shè)備提供了強(qiáng)大的動力支持,。
電機(jī)無位置傳感器控制技術(shù),,是現(xiàn)代電機(jī)控制領(lǐng)域的一項重要創(chuàng)新,。這項技術(shù)通過先進(jìn)的算法和軟件,實(shí)現(xiàn)了在不依賴傳統(tǒng)機(jī)械式傳感器(如霍爾傳感器,、編碼盤等)的情況下,,對電機(jī)轉(zhuǎn)子位置和速度的精確檢測與控制。這一突破不僅明顯降低了系統(tǒng)的復(fù)雜性和成本,,還提升了電機(jī)的可靠性和應(yīng)用范圍,。在無位置傳感器控制中,常見的實(shí)現(xiàn)方法包括基于反電動勢的檢測,、磁鏈觀測,、狀態(tài)觀測器法以及卡爾曼濾波等。其中,,反電動勢過零檢測法通過監(jiān)測電機(jī)繞組的反電動勢變化,,推斷轉(zhuǎn)子位置,適用于中高速運(yùn)行場景,。而卡爾曼濾波法則通過建立電機(jī)的數(shù)學(xué)模型,,利用擴(kuò)展卡爾曼濾波器在線實(shí)時估算轉(zhuǎn)子的位置和速度,具有更高的魯棒性和精度,尤其適合在復(fù)雜工況下應(yīng)用,。無位置傳感器控制技術(shù)還不斷融合新的信號處理和控制理論,,如滑模變結(jié)構(gòu)控制、模型參考自適應(yīng)控制等,,以進(jìn)一步提升控制性能和系統(tǒng)穩(wěn)定性,。這些技術(shù)的綜合應(yīng)用,使得電機(jī)無位置傳感器控制成為電機(jī)控制技術(shù)的一個重要發(fā)展方向,,普遍應(yīng)用于家用電器,、汽車驅(qū)動、工業(yè)控制等多個領(lǐng)域,,為現(xiàn)代工業(yè)的發(fā)展注入了新的活力,。電機(jī)控制可以通過控制電機(jī)的電流和電壓的頻率和相位來實(shí)現(xiàn)電機(jī)的多軸控制和同步控制。
電機(jī)交流回饋測功機(jī)是現(xiàn)代工業(yè)自動化領(lǐng)域中的一種重要測試設(shè)備,,它集成了高精度測量技術(shù)與先進(jìn)的電力電子技術(shù),,專為電機(jī)性能測試而設(shè)計。該設(shè)備通過模擬實(shí)際工作負(fù)載,,對電機(jī)進(jìn)行加載測試,,不僅能夠準(zhǔn)確測量電機(jī)的輸出扭矩、轉(zhuǎn)速,、功率等關(guān)鍵參數(shù),,還具備將電機(jī)在測試過程中產(chǎn)生的能量回饋至電網(wǎng)的能力,實(shí)現(xiàn)了能源的循環(huán)利用,。這一特性不僅提高了測試效率,,還明顯降低了能耗和測試成本。電機(jī)交流回饋測功機(jī)普遍應(yīng)用于汽車,、航空,、船舶、電力機(jī)械等多個行業(yè),,為電機(jī)研發(fā),、質(zhì)量控制及性能優(yōu)化提供了強(qiáng)有力的技術(shù)支持。其高動態(tài)響應(yīng)能力,、寬調(diào)速范圍及穩(wěn)定的測試環(huán)境,,確保了測試結(jié)果的準(zhǔn)確性和可靠性,是推動工業(yè)裝備向高效,、節(jié)能,、智能化方向發(fā)展的關(guān)鍵工具之一。先進(jìn)的電機(jī)控制算法,,確保穩(wěn)定運(yùn)行,。鄭州桌面型電機(jī)實(shí)驗(yàn)平臺
電機(jī)控制軟件優(yōu)化,提升兼容性。永磁同步電機(jī)費(fèi)用是多少
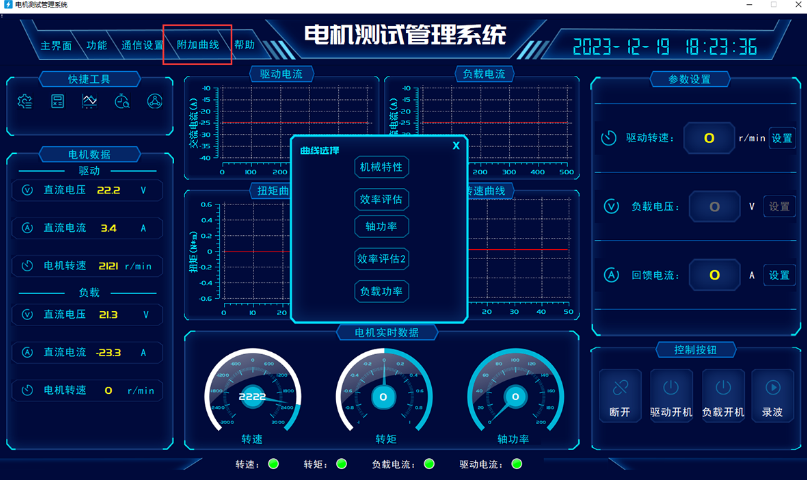
電機(jī)實(shí)驗(yàn)平臺作為電氣工程,、自動化控制及機(jī)電一體化等領(lǐng)域的重要教學(xué)與研究工具,,集成了高度靈活性與多功能性于一身。該平臺通過模塊化設(shè)計,,能夠支持多種類型電機(jī)的測試與控制,,包括但不限于直流電機(jī)、交流電機(jī),、步進(jìn)電機(jī)以及伺服電機(jī)等,,為學(xué)者與學(xué)生提供了一個全方面探索電機(jī)原理、性能分析,、控制系統(tǒng)設(shè)計的實(shí)驗(yàn)環(huán)境,。它不僅配備了先進(jìn)的數(shù)據(jù)采集與處理系統(tǒng),能夠?qū)崟r監(jiān)測電機(jī)運(yùn)行狀態(tài)下的電壓,、電流,、轉(zhuǎn)速、轉(zhuǎn)矩等關(guān)鍵參數(shù),,還通過軟件界面友好地展示實(shí)驗(yàn)數(shù)據(jù),,便于用戶直觀理解電機(jī)特性與控制算法的效果。電機(jī)實(shí)驗(yàn)平臺還具備可擴(kuò)展性,,用戶可根據(jù)研究需要自由組合實(shí)驗(yàn)?zāi)K,,進(jìn)行復(fù)雜系統(tǒng)級實(shí)驗(yàn),極大地促進(jìn)了創(chuàng)新思維與實(shí)踐能力的提升,??傊撈脚_是推動電機(jī)技術(shù)教學(xué)與研究發(fā)展的重要載體,,為培養(yǎng)高素質(zhì)工程技術(shù)人才提供了強(qiáng)有力的支持,。永磁同步電機(jī)費(fèi)用是多少
- 南寧電力電子技術(shù)實(shí)驗(yàn)臺 2025-03-30
- 新疆?dāng)夭娐穼?shí)驗(yàn) 2025-03-28
- 湖南高頻電力電子 2025-03-28
- 中國澳門快速原型控制器 2025-03-27
- 濟(jì)南高效電力電子 2025-03-26
- 電力電子實(shí)驗(yàn)室建設(shè)網(wǎng)上價格 2025-03-23
- 長春實(shí)時仿真機(jī) 2025-03-22
- 新疆高精度快速原型控制器 2025-03-21
- DSP代碼自動生成生產(chǎn) 2025-03-20
- 山東實(shí)時仿真系統(tǒng) 2025-03-19
- 福建8通道控制設(shè)備 2025-05-08
- 江蘇銷售跑步機(jī)電機(jī)用碳刷是什么 2025-05-08
- 福建生產(chǎn)車間智慧用電系統(tǒng)讓用電更智慧 2025-05-08
- 江蘇逆變器市場報價 2025-05-08
- 閔行區(qū)品牌除鐵器銷售價格 2025-05-08
- 江蘇進(jìn)口電線電纜附件哪家好 2025-05-08
- 吉林進(jìn)口智能家居設(shè)備原料 2025-05-08
- 蘇州進(jìn)口車載攝像頭修復(fù) 2025-05-08
- 技術(shù)PCS逆變器哪里有 2025-05-08
- 干式真空有載分接開關(guān)價格 2025-05-08