-
廣東中翔新材料簽約德米薩智能ERP加強(qiáng)企業(yè)管理水平
-
碩鋮工業(yè)簽約德米薩智能進(jìn)銷存系統(tǒng)提升企業(yè)管理水平
-
燊川實業(yè)簽約德米薩醫(yī)療器械管理軟件助力企業(yè)科學(xué)發(fā)展
-
森尼電梯簽約德米薩進(jìn)銷存系統(tǒng)優(yōu)化企業(yè)資源管控
-
喜報,!熱烈祝賀德米薩通過國際CMMI3認(rèn)證
-
德米薩推出MES系統(tǒng)助力生產(chǎn)制造企業(yè)規(guī)范管理
-
德米薩醫(yī)療器械管理軟件通過上海市醫(yī)療器械行業(yè)協(xié)會評審認(rèn)證
-
德米薩ERP助力客戶成功對接中石化易派客平臺
-
選擇進(jìn)銷存軟件要考慮哪些因素
-
德米薩告訴您為什么說ERP系統(tǒng)培訓(xùn)很重要?
視頻位移計模型
姿態(tài)估計:在傳感器測量的基礎(chǔ)上,,相機(jī)位移計使用姿態(tài)估計算法來推導(dǎo)相機(jī)的位移和姿態(tài)信息,。姿態(tài)估計算法通常基于傳感器測量數(shù)據(jù),,通過數(shù)學(xué)模型和濾波技術(shù)來估計相機(jī)的姿態(tài),。常見的姿態(tài)估計算法包括卡爾曼濾波、擴(kuò)展卡爾曼濾波,、粒子濾波和非線性優(yōu)化等,。這些算法可以根據(jù)傳感器測量數(shù)據(jù)的特點和應(yīng)用需求,選擇合適的方法來估計相機(jī)的位移和姿態(tài),。姿態(tài)估計算法通常需要考慮傳感器的誤差,、噪聲和不確定性等因素,并通過濾波和校準(zhǔn)等技術(shù)來提高估計的準(zhǔn)確性和穩(wěn)定性,。位移計可以用于測量天體的位置和運動,。視頻位移計模型

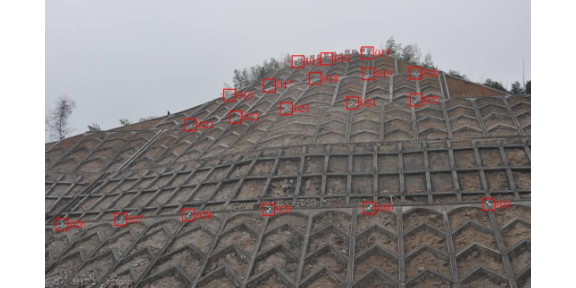
在隧道監(jiān)測中,,圖像位移計可以應(yīng)用于以下方面:隧道掘進(jìn)變形監(jiān)測:在隧道施工過程中,圖像位移計可以用于監(jiān)測隧道壁面的變形情況,,如振動,、沉降、扭曲等,。通過連續(xù)采集隧道壁面的圖像,,并分析特定特征點的位移,可以及時發(fā)現(xiàn)施工過程中的變形問題,,確保施工的穩(wěn)定性和安全性,。隧道穩(wěn)定性監(jiān)測:已建成的隧道可能會由于地質(zhì)變化、水土條件等因素而發(fā)生變形,,圖像位移計可以應(yīng)用于對隧道結(jié)構(gòu)的穩(wěn)定性進(jìn)行監(jiān)測,。通過定期采集隧道壁面的圖像,并對特殊標(biāo)識點進(jìn)行位移分析,,可以實時跟蹤隧道結(jié)構(gòu)的變形情況,,及時發(fā)現(xiàn)異常變形,并采取相應(yīng)的維護(hù)措施,。隧道設(shè)備和管線的位移監(jiān)測:隧道內(nèi)的設(shè)備和管線,,如通風(fēng)設(shè)備、消防系統(tǒng),、電纜等,,也需要進(jìn)行位移監(jiān)測。通過圖像位移計可以在隧道內(nèi)監(jiān)測這些設(shè)備和管線的位移變化,,及時發(fā)現(xiàn)位移超限或異常情況,,并采取措施進(jìn)行調(diào)整或修復(fù)。隧道地質(zhì)災(zāi)害監(jiān)測:隧道所在地區(qū)可能存在地質(zhì)災(zāi)害,,如滑坡,、地震等。圖像位移計可以應(yīng)用于對隧道周圍地質(zhì)災(zāi)害的監(jiān)測,。通過采集隧道周圍地表的圖像,,并測量特定特征點的位移變化,可以預(yù)警隧道周圍地質(zhì)災(zāi)害的發(fā)生和影響程度,??傊?a href="http://18740.cn/zdcbsx/kjw4oobb8s/29247655.html" target="_blank">視覺位移計推薦品牌相機(jī)位移計的價格如何,?
在材料試驗中,,位移計是一種用于測量物體的位移或變形的儀器。選擇適合的位移計對于準(zhǔn)確測量材料的力學(xué)性能至關(guān)重要。以下是選擇適合位移計的要點:測量范圍:首先要確定需要測量的位移范圍,。不同的試驗可能需要不同的位移范圍,,因此需要選擇一個能夠滿足試驗需求的位移計。通常,,位移計的測量范圍應(yīng)略大于試驗中預(yù)期的比較大位移,。精度和分辨率:位移計的精度和分辨率也是選擇時的重要考慮因素。精度是指位移計測量結(jié)果與實際位移之間的偏差,,而分辨率是指位移計能夠分辨的蕞小位移變化。通常情況下,,精度和分辨率越高,,位移計的測量結(jié)果越準(zhǔn)確。
相機(jī)位移計是一種設(shè)備,,用于測量相機(jī)在空間中的位移和姿態(tài)變化,。它由多個傳感器和計算單元組成,能夠?qū)崟r監(jiān)測相機(jī)的位置和方向,,并將這些數(shù)據(jù)應(yīng)用于虛擬現(xiàn)實,、增強(qiáng)現(xiàn)實、機(jī)器人導(dǎo)航等領(lǐng)域,。相機(jī)位移計的工作原理基于傳感器技術(shù),,包括慣性測量單元(IMU)、全局定位系統(tǒng)(GPS),、視覺傳感器等,。這些傳感器能夠感知相機(jī)的加速度、角速度,、方向等信息,,并將其轉(zhuǎn)化為數(shù)字信號供計算單元處理。在相機(jī)位移計中,,IMU是常用的傳感器之一,,由加速度計和陀螺儀組成,用于測量相機(jī)的線性加速度和角速度,。通過對這些測量值進(jìn)行積分,,可以得到相機(jī)的速度和位移。然而,,由于積分誤差會隨著時間累積,,因此IMU通常需要與其他傳感器結(jié)合使用,以提高測量的準(zhǔn)確性和穩(wěn)定性,。位移計是一種用于測量物體的位置變化的儀器,。
儀器安裝位置選擇:位移計的安裝位置選擇對測量結(jié)果有重要影響。如果安裝位置選擇不當(dāng),可能會導(dǎo)致測量誤差增大,。解決方法是根據(jù)具體測量需求選擇合適的安裝位置,,并遵循儀器說明書中的建議。儀器與被測對象之間的連接問題:位移計需要與被測對象進(jìn)行連接,,以實現(xiàn)位移測量,。連接方式不正確或連接不牢固可能導(dǎo)致測量誤差。解決方法是確保連接方式正確,,并使用適當(dāng)?shù)倪B接件進(jìn)行連接,。儀器讀數(shù)誤差校正:位移計的讀數(shù)可能存在一定的誤差,需要進(jìn)行誤差校正,。解決方法是根據(jù)儀器說明書中的校正方法進(jìn)行校正,,或者使用校準(zhǔn)設(shè)備進(jìn)行校正。位移計可以用于測量物體的線性位移,,也可以用于測量物體的角位移,。工程試驗位移計廠家有哪些
位移計的維護(hù)和保養(yǎng)方法是什么?視頻位移計模型
Ziki-M圖像位移測量系統(tǒng)的應(yīng)用可以分為以下幾個方面:1.隧道施工過程中的位移監(jiān)測在隧道施工過程中,,由于地質(zhì)條件的不同,,隧道內(nèi)部的變形和位移情況也會有所不同。為了確保隧道施工的安全和穩(wěn)定,,需要對隧道內(nèi)部的變形和位移進(jìn)行實時監(jiān)測,。Ziki-M圖像位移測量系統(tǒng)可以通過對隧道內(nèi)部的圖像進(jìn)行分析,實現(xiàn)對隧道內(nèi)部的位移和變形的實時監(jiān)測,,及時發(fā)現(xiàn)隧道內(nèi)部的變形和位移情況,,為隧道施工提供有力的支持。2.隧道施工后的位移監(jiān)測隧道施工完成后,,隧道內(nèi)部的變形和位移情況仍然需要進(jìn)行監(jiān)測,。Ziki-M圖像位移測量系統(tǒng)可以通過對隧道內(nèi)部的圖像進(jìn)行分析,實現(xiàn)對隧道內(nèi)部的位移和變形的實時監(jiān)測,,及時發(fā)現(xiàn)隧道內(nèi)部的變形和位移情況,,為隧道使用和維護(hù)提供有力的支持。3.隧道災(zāi)害后的位移監(jiān)測在隧道發(fā)生災(zāi)害后,,隧道內(nèi)部的變形和位移情況需要進(jìn)行監(jiān)測,。Ziki-M圖像位移測量系統(tǒng)可以通過對隧道內(nèi)部的圖像進(jìn)行分析,實現(xiàn)對隧道內(nèi)部的位移和變形的實時監(jiān)測,,及時發(fā)現(xiàn)隧道內(nèi)部的變形和位移情況,,為隧道災(zāi)害的處理提供有力的支持。4.隧道使用過程中的位移監(jiān)測隧道使用過程中,,隧道內(nèi)部的變形和位移情況也需要進(jìn)行監(jiān)測,。Ziki-M圖像位移測量系統(tǒng)可以通過對隧道內(nèi)部的圖像進(jìn)行分析。視頻位移計模型
- 隧道巡檢機(jī)器人價格 2025-05-18
- 成都工程位移計生產(chǎn)廠家 2025-05-18
- 視覺位移計品牌 2025-05-18
- 四川位移計廠家 2025-05-18
- 高精度位移計質(zhì)量 2025-05-18
- 成都圖像位移計推薦廠家 2025-05-17
- 成都視覺位移計供應(yīng)廠家 2025-05-17
- 成都隧道巡檢機(jī)器人批發(fā) 2025-05-17
- 高精度位移計現(xiàn)貨經(jīng)營 2025-05-17
- 寬度測量位移計推薦品牌 2025-05-17
- 上海飛機(jī)制造零部件3D打印哪里有賣的 2025-05-18
- 四川商務(wù)咨詢包括什么 2025-05-18
- 杭州不銹鋼酸洗鈍化 2025-05-18
- 多功能空氣能熱泵 2025-05-18
- 雨花臺區(qū)本地廣告設(shè)計供應(yīng) 2025-05-18
- 徐匯區(qū)社區(qū)陵園 2025-05-18
- 長寧區(qū)幼兒園消防培訓(xùn)演練 2025-05-18
- 廣東中藥飲片GMP咨詢服務(wù) 2025-05-18
- 西藏網(wǎng)絡(luò)AI人工智能大數(shù)據(jù)云計算產(chǎn)品 2025-05-18
- 江西城市供水管道檢測報價 2025-05-18