珠海原裝晶圓運送機械吸臂新報價
2.噴涂機械臂 這種機械臂多用于噴漆生產(chǎn)線上,重復(fù)位姿精度要求不高,。但由于漆霧易燃,,一般采用液壓驅(qū)動或交流伺服電機驅(qū)動,。3.焊接機械臂 這是目前使用**多的一類機械臂,,它又可分為點焊和弧焊兩類。點焊機械臂負荷大基本介紹當提到機械人時,,許多人會想到有手,,有腳的人型機械.不過, 這類機械人往往出現(xiàn)在科幻電影,,***所,,展覽會和玩具店中,它們與工業(yè)用的機械人大不相同. 工業(yè)機械人(Industrial Robots)簡稱為IR,,它們大多為簡單的操作設(shè)備,,有時會被稱為機械臂,例如:進行簡單的提起或放下動作,,在機器內(nèi)放入或取出工件等.不過,,亦有不少工業(yè)機械人可以完全用程式控制,并可進行不同類型工作,,機械手的運動速度一般是根據(jù)產(chǎn)品的生產(chǎn)節(jié)拍要求來決定的,,但不宜盲目追求高速度。珠海原裝晶圓運送機械吸臂新報價

受歐美股指隔夜再度全線殺跌的影響,,兩市**小幅低開,,低開后的市場在抄底盤和北上資金的推動下震蕩走高,早間收盤全線收漲,,午后在科技板塊的帶動下市場繼續(xù)震蕩走高,,**終兩市**以中陽報收。
昨天談到農(nóng)業(yè),、大消費和科技股目前呈現(xiàn)出蹺蹺板的態(tài)勢,,果不其然***出現(xiàn)了此消彼長的情形。
盤面上看,,市場***科技股再度走強,,以大基金持有的科技股繼續(xù)**著相關(guān)題材概念和板塊進行做多,北上資金***依舊大幅凈流入,市場短期做多的因素和動能正在疊加,。
盤后出了條消息,,“中方不會坐視不理美科技霸凌主義”,先機哥由此猜測市場短期的反彈將還是延著科技股這條主線,,畢竟帶動市場人氣方面沒有哪個板塊比科技股更適合,。
昨晚提醒大家關(guān)注的科遠智慧,***低開高走收大陽,,開盤后水下潛入的朋友也有7個點的收獲,,該股短期有望突破創(chuàng)新高。
廣州晶圓運送機械吸臂代理廠家科學(xué)家已經(jīng)研制出了橡膠機器手臂,,可以抓起螞蟻而不是捏死,。
3) 加速度反饋控制。Khorrami FarShad 和Jain Sandeep研究了利用末端加速度反饋控制柔性機械臂的末端軌跡控制問題,。4) 被動阻尼控制,。為降低柔性體相對彈性變形的影響 選用各種耗能或儲能材料設(shè)計臂的結(jié)構(gòu)以控制振動。 或者在柔性梁上采用阻尼減振器,、阻尼材料,、復(fù)合型阻尼金屬板、,、阻尼合金或用粘彈性大阻尼材料形成附加阻尼結(jié)構(gòu)均屬于被動阻尼控制,。 近年來 粘彈性大阻尼材料用于柔性機械臂的振動控制已引起高度重視。RoSSi Mauro 和Wang David研究了柔性機器人的被動控制問題,。5) 力反饋控制法,。柔性機械臂振動的力反饋控制實際上是基于逆動力學(xué)分析的控制方法 即根據(jù)逆動力學(xué)分析 通過臂末端的給定運動求得施加于驅(qū)動端的力矩 并通過運動或力檢測對驅(qū)動力矩進行反饋補償。
工業(yè)機械臂不應(yīng)該稱之為智能制造的未來,,智能制造的概念與涵蓋的范圍不是工業(yè)機械臂這一種工業(yè)產(chǎn)品能夠一言以蔽之的,。高精度、多傳感的三軸與五軸加工就不是智能制造了嗎,?答案肯定是否定的,。智能制造的目的在于高度自適應(yīng)、多傳感信息融合等,,將現(xiàn)有的制造水平提升到更高的層次,,工業(yè)機械臂只是時下研究的熱點,工業(yè)機械臂在未來智能場景中的角色目前還未能給出定論,。簡單的搬運與碼垛,,根本無法稱之為智能制造。工業(yè)機械臂距離高精度的智能制造還有很長一段路要走,,而且這條路是否能走得通,,還是一個問號呢,,目前各國的研究人員都比較看好這個方向,普遍認為機械臂是實現(xiàn)智能制造的很好的載體,,可以實現(xiàn)五軸數(shù)控無法實現(xiàn)的大操作空間與靈活性,。 單軸機械手臂作為一個組件在工業(yè)中應(yīng)用***。
技術(shù)實現(xiàn)要素:
本實用新型要解決的技術(shù)問題是:現(xiàn)有機械手臂易出現(xiàn)碰撞損傷,,且傳送晶圓效率較低,。
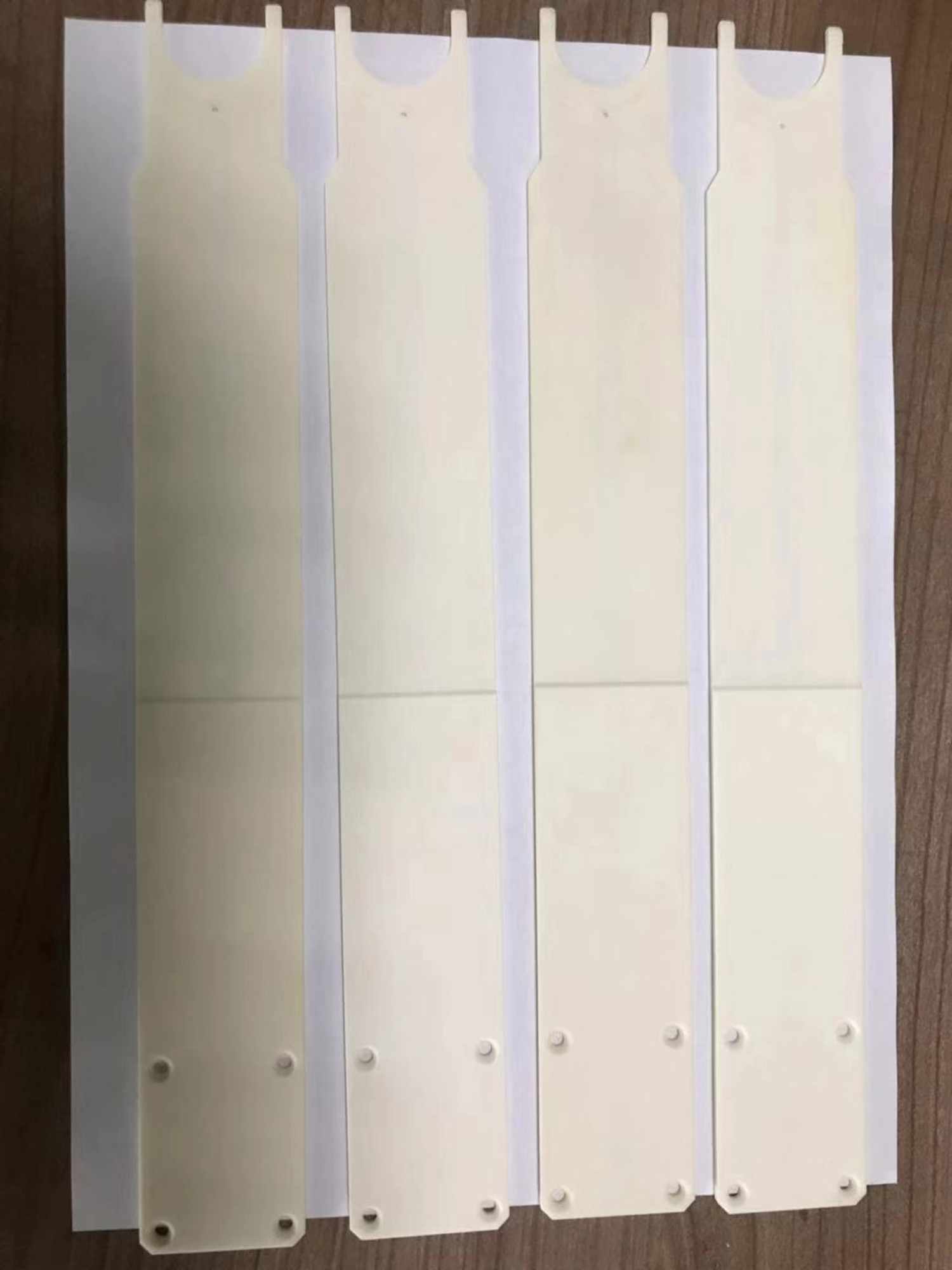
為了解決上述問題,本實用新型的一個實施例提供了一種機械手臂,,其包括:托板,;固定在所述托板上的絨毛墊,所述絨毛墊至少部分裸露于所述托板的用于承載晶圓的表面,,并適于在與所述表面之上的晶圓接觸時利用范德華力吸附晶圓,。
可選地,所述絨毛墊包括托墊和絨毛,,所述托墊固定在所述托板上,,所述絨毛固定在所述托墊上,。
可選地,,所述托板設(shè)有貫穿所述表面的螺紋通孔,所述托墊嵌設(shè)在所述螺紋通孔內(nèi),,并通過與所述螺紋通孔螺紋配合的螺釘固定在所述托板上,。
可選地,所述絨毛為硅樹脂橡膠絨毛或聚酯樹膠絨毛,。
可選地,,所述機械手臂上所有絨毛的黏合力之和為6N以上。
可選地,,所述絨毛墊上的絨毛排列成環(huán)形,。
可選地,所述絨毛墊的數(shù)量為三個以上,,各個所述絨毛墊之間間隔排布,。 手臂由靜止狀態(tài)達到正常的運動速度為啟動,由常速減到停止不動為制動,,速度的變化過程為速度特性曲線,。中山庫存晶圓運送機械吸臂怎么聯(lián)系
運動元件。如油缸,、氣缸,、齒條、凸輪等是驅(qū)動手臂運動的部件,。珠海原裝晶圓運送機械吸臂新報價
本發(fā)明涉及一種半導(dǎo)體制造技術(shù),,尤其是一種用于晶圓搬運的機械手。
背景技術(shù):
在半導(dǎo)體加工設(shè)備中,經(jīng)常需要將晶圓在各個工位之間進行傳送,,在傳送的過程中,,傳送精度越高,設(shè)備工藝一致性就越好,,速度越快,,單臺設(shè)備的產(chǎn)能就越大。隨著半導(dǎo)體工藝的發(fā)展,,設(shè)備處理的工藝越來越復(fù)雜,,對設(shè)備自動化程度、柔性化程度要求也越來越高,,這就需要一種定位精度高,,速度快的多自由度的機械手。
技術(shù)實現(xiàn)要素:
本發(fā)明針對現(xiàn)有技術(shù)中的不足,,提供了一種晶圓搬運機械手,,本發(fā)明的機械手在傳送過程中晶片中心始終保證直線運動,且角度不會發(fā)生改變,。從而提高機械手整體剛度和承重能力,,同時提高了重復(fù)定位精度。本發(fā)明結(jié)構(gòu)合理性能穩(wěn)定,,維護方便,,多功能集一身,可滿足多種工藝設(shè)備要求,,適用于各種半導(dǎo)體設(shè)備,。
珠海原裝晶圓運送機械吸臂新報價
深圳市德澳美科技有限公司是一家有著雄厚實力背景、信譽可靠,、勵精圖治,、展望未來、有夢想有目標,,有組織有體系的公司,,堅持于帶領(lǐng)員工在未來的道路上大放光明,攜手共畫藍圖,,在廣東省深圳市等地區(qū)的機械及行業(yè)設(shè)備行業(yè)中積累了大批忠誠的客戶粉絲源,,也收獲了良好的用戶口碑,為公司的發(fā)展奠定的良好的行業(yè)基礎(chǔ),,也希望未來公司能成為*****,,努力為行業(yè)領(lǐng)域的發(fā)展奉獻出自己的一份力量,我們相信精益求精的工作態(tài)度和不斷的完善創(chuàng)新理念以及自強不息,,斗志昂揚的的企業(yè)精神將**德澳美和您一起攜手步入輝煌,,共創(chuàng)佳績,,一直以來,公司貫徹執(zhí)行科學(xué)管理,、創(chuàng)新發(fā)展,、誠實守信的方針,員工精誠努力,,協(xié)同奮取,,以品質(zhì)、服務(wù)來贏得市場,,我們一直在路上,!
- 無錫官方晶圓運送機械吸臂新報價 2025-06-25
- 浙江正規(guī)微孔陶瓷真空吸盤市場價 2025-06-24
- 茂名精密結(jié)構(gòu)陶瓷賣價 2025-06-24
- 肇慶新款晶圓運送機械吸臂廠家報價 2025-06-24
- 無錫官方微孔陶瓷真空吸盤生產(chǎn)廠家 2025-06-24
- 梅州進口晶圓運送機械吸臂價格信息 2025-06-24
- 江蘇進口晶圓運送機械吸臂上門服務(wù) 2025-06-23
- 揭陽正規(guī)微孔陶瓷真空吸盤價格便宜 2025-06-23
- 梅州正規(guī)晶圓運送機械吸臂公司 2025-06-23
- 揭陽新款晶圓運送機械吸臂廠商 2025-06-23
- 河北蔬菜種子加工廠家報價 2025-06-25
- 輝縣廢氣處理噴淋塔廠家 2025-06-25
- 廣東洋酒鋁箔封口封口線 2025-06-25
- 廣西機器人制造自動化生產(chǎn)線工作站 2025-06-25
- 福建線性致動器 2025-06-25
- 成都pvc輸送帶工業(yè)皮帶供應(yīng) 2025-06-25
- 上饒箱式側(cè)開門玻璃實驗坩堝熔爐品牌 2025-06-25
- 湖南中液智能線纜卷盤廠家直供 2025-06-25
- 立式燃氣導(dǎo)熱油爐廠家直銷 2025-06-25
- 上海鶴管干斷閥品牌企業(yè) 2025-06-25