南通正規(guī)晶圓運(yùn)送機(jī)械吸臂推廣
控制策略對(duì)柔性機(jī)械臂的控制一般有如下方式,1)剛性化處理。完全忽略結(jié)構(gòu)的彈性變形對(duì)結(jié)構(gòu)剛體運(yùn)動(dòng)的影響。例如為了避免過(guò)大的彈性變形破壞柔性機(jī)械臂的穩(wěn)定性和末端定位精度NASA的遙控太空手運(yùn)動(dòng)的比較大角速度為,。2)前饋補(bǔ)償法,。將機(jī)械臂柔性變形形成的機(jī)械振動(dòng)看成是對(duì)剛性運(yùn)動(dòng)的確定性干擾而采用前饋補(bǔ)償?shù)霓k法來(lái)抵消這種干擾。德國(guó)的BerndGebler研究了具有彈性桿和彈性關(guān)節(jié)的工業(yè)機(jī)器人的前饋控制,。張鐵民研究了基于利用增加零點(diǎn)來(lái)消除系統(tǒng)的主導(dǎo)極點(diǎn)和系統(tǒng)不穩(wěn)定的方法設(shè)計(jì)了具有時(shí)間延時(shí)的前饋控制器和PID控制器比較起來(lái)可以更加明顯的消除系統(tǒng)的殘余振動(dòng)。SeeringWarrenP。等學(xué)者對(duì)前饋補(bǔ)償技術(shù)進(jìn)行了深入的研究,。 合理選擇機(jī)械手的坐標(biāo)形式。直角坐標(biāo)式機(jī)械手的位置精度較高,,其結(jié)構(gòu)和運(yùn)動(dòng)都比較簡(jiǎn)單,、誤差也小。南通正規(guī)晶圓運(yùn)送機(jī)械吸臂推廣
2.噴涂機(jī)械臂 這種機(jī)械臂多用于噴漆生產(chǎn)線(xiàn)上,,重復(fù)位姿精度要求不高,。但由于漆霧易燃,,一般采用液壓驅(qū)動(dòng)或交流伺服電機(jī)驅(qū)動(dòng)。3.焊接機(jī)械臂 這是目前使用**多的一類(lèi)機(jī)械臂,,它又可分為點(diǎn)焊和弧焊兩類(lèi),。點(diǎn)焊機(jī)械臂負(fù)荷大基本介紹當(dāng)提到機(jī)械人時(shí),許多人會(huì)想到有手,,有腳的人型機(jī)械.不過(guò),, 這類(lèi)機(jī)械人往往出現(xiàn)在科幻電影,***所,,展覽會(huì)和玩具店中,,它們與工業(yè)用的機(jī)械人大不相同. 工業(yè)機(jī)械人(Industrial Robots)簡(jiǎn)稱(chēng)為IR,它們大多為簡(jiǎn)單的操作設(shè)備,,有時(shí)會(huì)被稱(chēng)為機(jī)械臂,,例如:進(jìn)行簡(jiǎn)單的提起或放下動(dòng)作,在機(jī)器內(nèi)放入或取出工件等.不過(guò),,亦有不少工業(yè)機(jī)械人可以完全用程式控制,,并可進(jìn)行不同類(lèi)型工作,江蘇銷(xiāo)售晶圓運(yùn)送機(jī)械吸臂市場(chǎng)報(bào)價(jià)機(jī)械手臂根據(jù)結(jié)構(gòu)形式的不同分為多關(guān)節(jié)機(jī)械手臂.
晶圓是指硅半導(dǎo)體集成電路制作所用的硅晶片,,由于其形狀為圓形,,故稱(chēng)為晶圓;在硅晶片上可加工制作成各種電路元件結(jié)構(gòu),,而成為有特定電性功能的集成電路產(chǎn)品,。
晶圓的原始材料是硅,而地殼表面有用之不竭的二氧化硅,。二氧化硅礦石經(jīng)由電弧爐提煉,,**化,并經(jīng)蒸餾后,,制成了高純度的多晶硅,,其純度高達(dá)99.9%。
晶圓是制造半導(dǎo)體芯片的基本材料,,半導(dǎo)體集成電路**主要的原料是硅,,因此對(duì)應(yīng)的就是硅晶圓。 關(guān)節(jié)式機(jī)械手因其結(jié)構(gòu)復(fù)雜,。廣東官方晶圓運(yùn)送機(jī)械吸臂價(jià)格便宜
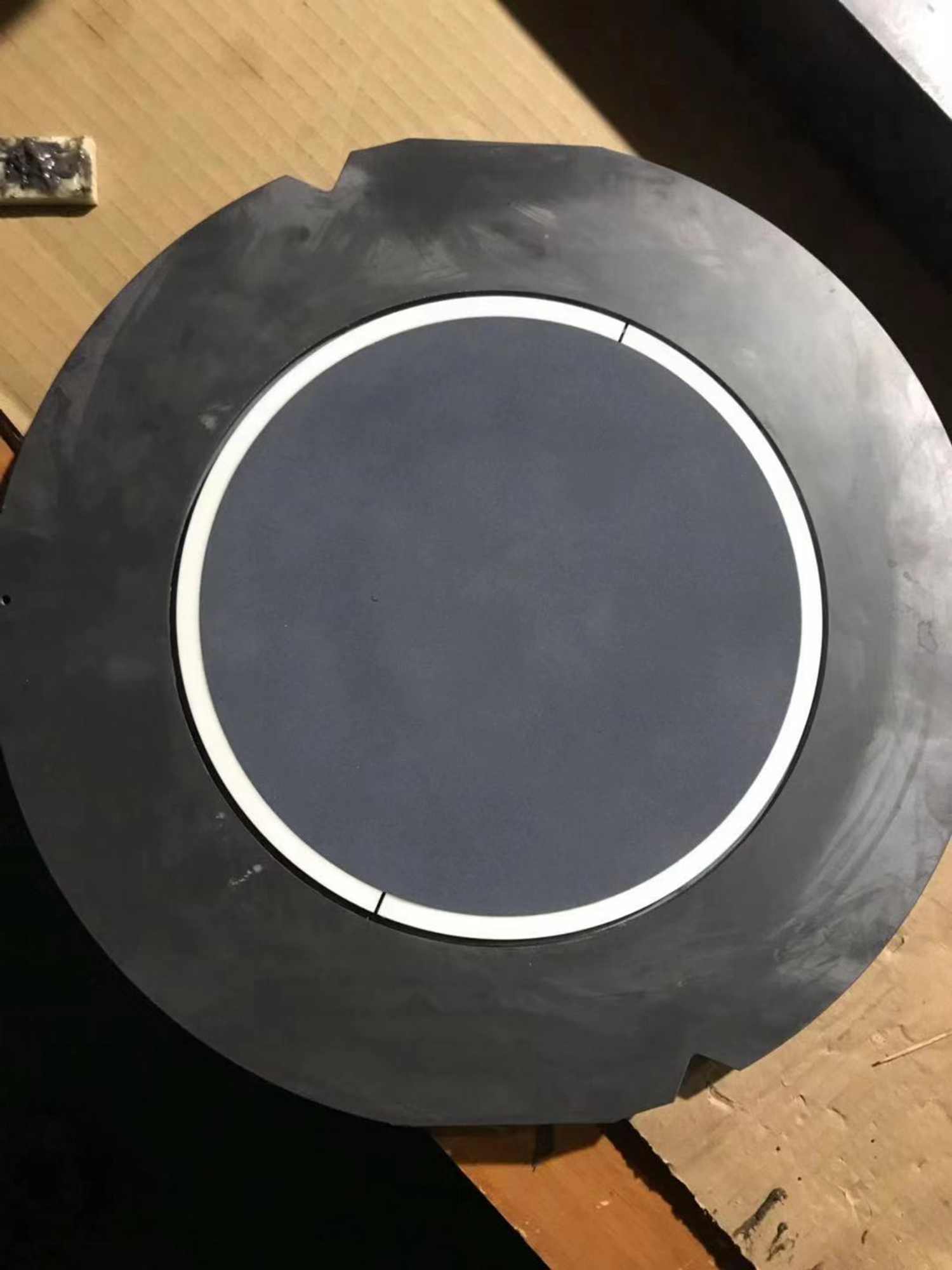
一種用于傳送晶圓的真空吸附機(jī)械手,,其特征在于,包括:手臂,;固定在所述手臂上的吸附絕緣凸臺(tái),;設(shè)置在所述手臂和吸附絕緣凸臺(tái)內(nèi)的真空氣道;所述吸附絕緣凸臺(tái)呈環(huán)形,,所述吸附絕緣凸臺(tái)所圍成的空間構(gòu)成所述真空氣道的其中一段,;位于所述吸附絕緣凸臺(tái)內(nèi)的偽絕緣凸臺(tái),,所述偽絕緣凸臺(tái)與手臂一體成型,所述真空氣道的其中一段位于所述偽絕緣凸臺(tái)內(nèi),;在垂直于所述手臂的方向上,,所述吸附絕緣凸臺(tái)比所述偽絕緣凸臺(tái)突出;所述吸附絕緣凸臺(tái)用于吸附待傳送晶圓的背面,,所述吸附絕緣凸臺(tái)的硬度小于所述待傳送晶圓的背面的硬度,。手臂上的零部件,如油缸,、導(dǎo)向桿,、控制件等都安裝在手臂上。
半導(dǎo)體行業(yè),,尤其是集成電路領(lǐng)域,,晶圓的身影隨處可見(jiàn)。
晶圓就是一塊薄薄的,、圓形的高純硅晶片,,而在這種高純硅晶片上可以加工制作出各種電路元件結(jié)構(gòu),使之成為有特定電性功能的集成電路產(chǎn)品,。
眼前這密密麻麻的元器件,,被整整齊齊的安放在一塊單晶硅材料之上,都是規(guī)規(guī)矩矩,、方方正正的??梢?jiàn),,晶圓在實(shí)際應(yīng)用之中還是要被切割成方形的。
所以疑問(wèn)?來(lái)了——硅片為什么要做成圓的,?為什么是“晶圓”,,而不做成“晶方”?
要解釋這個(gè)問(wèn)題,,有兩方面的原因:一方面似乎是由“基因決定的”,;另一方面是“環(huán)境造成的”。
本發(fā)明針對(duì)現(xiàn)有技術(shù)中的不足,,提供了一種晶圓搬運(yùn)機(jī)械手,,本發(fā)明的機(jī)械手在傳送過(guò)程中晶片中心始終保證直線(xiàn)運(yùn)動(dòng),且角度不會(huì)發(fā)生改變,。從而提高機(jī)械手整體剛度和承重能力,,同時(shí)提高了重復(fù)定位精度。本發(fā)明結(jié)構(gòu)合理性能穩(wěn)定,,維護(hù)方便,,多功能集一身,,可滿(mǎn)足多種工藝設(shè)備要求,適用于各種半導(dǎo)體設(shè)備,。
各支承,、連接件的剛性也要有一定的要求,以保證能承受所需要的驅(qū)動(dòng)力,。南京官方晶圓運(yùn)送機(jī)械吸臂哪個(gè)牌子好
運(yùn)動(dòng)元件,。如油缸、氣缸,、齒條,、凸輪等是驅(qū)動(dòng)手臂運(yùn)動(dòng)的部件。南通正規(guī)晶圓運(yùn)送機(jī)械吸臂推廣
晶圓運(yùn)送機(jī)械吸臂是半導(dǎo)體制造過(guò)程中不可或缺的重要設(shè)備之一,。它主要用于將晶圓從一個(gè)工序轉(zhuǎn)移到另一個(gè)工序,,確保晶圓在整個(gè)制造過(guò)程中的安全和穩(wěn)定運(yùn)輸。
晶圓運(yùn)送機(jī)械吸臂具有高度的自動(dòng)化和精確性,。它采用先進(jìn)的自動(dòng)控制系統(tǒng),,能夠準(zhǔn)確地定位和抓取晶圓,避免了人為操作的誤差和不穩(wěn)定性,。通過(guò)精確的控制,,晶圓可以在不同工序之間快速而安全地轉(zhuǎn)移,提高了生產(chǎn)效率和產(chǎn)品質(zhì)量,。其次,,晶圓運(yùn)送機(jī)械吸臂具有高度的可靠性和穩(wěn)定性。它采用了質(zhì)量高的材料和先進(jìn)的制造工藝,,具有良好的耐磨性和抗腐蝕性,。同時(shí),晶圓運(yùn)送機(jī)械吸臂經(jīng)過(guò)嚴(yán)格的測(cè)試和檢驗(yàn),,確保其在長(zhǎng)時(shí)間運(yùn)行中不會(huì)出現(xiàn)故障或損壞,,保證了生產(chǎn)線(xiàn)的連續(xù)性和穩(wěn)定性。 南通正規(guī)晶圓運(yùn)送機(jī)械吸臂推廣
深圳市德澳美科技有限公司是一家有著先進(jìn)的發(fā)展理念,,先進(jìn)的管理經(jīng)驗(yàn),,在發(fā)展過(guò)程中不斷完善自己,要求自己,,不斷創(chuàng)新,,時(shí)刻準(zhǔn)備著迎接更多挑戰(zhàn)的活力公司,在廣東省等地區(qū)的機(jī)械及行業(yè)設(shè)備中匯聚了大量的人脈以及**,,在業(yè)界也收獲了很多良好的評(píng)價(jià),,這些都源自于自身的努力和大家共同進(jìn)步的結(jié)果,這些評(píng)價(jià)對(duì)我們而言是比較好的前進(jìn)動(dòng)力,也促使我們?cè)谝院蟮牡缆飞媳3謯^發(fā)圖強(qiáng),、一往無(wú)前的進(jìn)取創(chuàng)新精神,,努力把公司發(fā)展戰(zhàn)略推向一個(gè)新高度,在全體員工共同努力之下,,全力拼搏將共同深圳市德澳美精密制造供應(yīng)和您一起攜手走向更好的未來(lái),,創(chuàng)造更有價(jià)值的產(chǎn)品,我們將以更好的狀態(tài),,更認(rèn)真的態(tài)度,,更飽滿(mǎn)的精力去創(chuàng)造,去拼搏,,去努力,,讓我們一起更好更快的成長(zhǎng)!
- 無(wú)錫官方晶圓運(yùn)送機(jī)械吸臂新報(bào)價(jià) 2025-06-25
- 浙江正規(guī)微孔陶瓷真空吸盤(pán)市場(chǎng)價(jià) 2025-06-24
- 茂名精密結(jié)構(gòu)陶瓷賣(mài)價(jià) 2025-06-24
- 肇慶新款晶圓運(yùn)送機(jī)械吸臂廠家報(bào)價(jià) 2025-06-24
- 無(wú)錫官方微孔陶瓷真空吸盤(pán)生產(chǎn)廠家 2025-06-24
- 梅州進(jìn)口晶圓運(yùn)送機(jī)械吸臂價(jià)格信息 2025-06-24
- 江蘇進(jìn)口晶圓運(yùn)送機(jī)械吸臂上門(mén)服務(wù) 2025-06-23
- 揭陽(yáng)正規(guī)微孔陶瓷真空吸盤(pán)價(jià)格便宜 2025-06-23
- 梅州正規(guī)晶圓運(yùn)送機(jī)械吸臂公司 2025-06-23
- 揭陽(yáng)新款晶圓運(yùn)送機(jī)械吸臂廠商 2025-06-23
- 河北蔬菜種子加工廠家報(bào)價(jià) 2025-06-25
- 輝縣廢氣處理噴淋塔廠家 2025-06-25
- 廣東洋酒鋁箔封口封口線(xiàn) 2025-06-25
- 廣西機(jī)器人制造自動(dòng)化生產(chǎn)線(xiàn)工作站 2025-06-25
- 福建線(xiàn)性致動(dòng)器 2025-06-25
- 成都pvc輸送帶工業(yè)皮帶供應(yīng) 2025-06-25
- 上饒箱式側(cè)開(kāi)門(mén)玻璃實(shí)驗(yàn)坩堝熔爐品牌 2025-06-25
- 湖南中液智能線(xiàn)纜卷盤(pán)廠家直供 2025-06-25
- 立式燃?xì)鈱?dǎo)熱油爐廠家直銷(xiāo) 2025-06-25
- 上海鶴管干斷閥品牌企業(yè) 2025-06-25