湛江晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇
年來全球硅晶圓供給不足,導(dǎo)致8英寸,、12英寸硅晶圓訂單能見度分別已達(dá)2019上半年和年底,。目前國(guó)內(nèi)多個(gè)硅晶圓項(xiàng)目已經(jīng)開始籌備,期望有朝一日能夠打破進(jìn)口依賴,,并有足夠的能力滿足市場(chǎng)需求,。硅在自然界中以硅酸鹽或二氧化硅的形式***存在于巖石,、砂礫中,硅晶圓的制造可以歸納為三個(gè)基本步驟:硅提煉及提純,、單晶硅生長(zhǎng),、晶圓成型。一,,晶柱制造步驟硅提純:將沙石原料放入一個(gè)溫度約為2000℃,,并且有碳源存在的電弧熔爐中,在高溫下,,碳和沙石中的二氧化硅進(jìn)行化學(xué)反應(yīng)(碳氧結(jié)合,,得硅),提純得純度約為98%的純硅,,又稱冶金級(jí)硅,,這對(duì)微電子器件來說依然不夠純,因?yàn)榘雽?dǎo)體材料的電學(xué)特性對(duì)雜質(zhì)的濃度相當(dāng)?shù)拿舾?,因而?duì)冶金級(jí)硅作進(jìn)一步提純:將粉碎的冶金級(jí)硅與氣態(tài)的氯化氫進(jìn)行氯化反應(yīng),,生成液態(tài)的硅烷,然后通過蒸餾和化學(xué)還原工藝,,得到了高純度的多晶硅,,其純度達(dá)99%,成為電子級(jí)硅,。吸臂材質(zhì)優(yōu),,具有良好的耐腐蝕性和耐磨性。湛江晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇

工業(yè)機(jī)械臂是擬人手臂,、手腕和手功能 的機(jī)械電子裝置,。擬人手臂,、手腕和手功能的機(jī)械電子裝置,;它可把任一物件或工具按空間位姿(位置和姿態(tài))的時(shí)變要求進(jìn)行移動(dòng),,從而完成某一工業(yè)生產(chǎn)的作業(yè)要求。如夾持焊鉗或焊***,,對(duì)汽車或摩托車車體進(jìn)行了點(diǎn)焊或弧焊,;搬運(yùn)壓鑄或沖壓成型的零件或構(gòu)件;進(jìn)行激光切割,;噴涂,;裝配機(jī)械零部件等等。機(jī)械臂是“ROBOT”一詞的中文譯名,。由于影視宣傳和科幻小說的影響,,人們往往把機(jī)械臂想像成外貌似人的機(jī)械和電子裝置。但事實(shí)并不是這樣,,特別是工業(yè)機(jī)械臂,,與人的外貌往往毫無相似之處。根據(jù)國(guó)家標(biāo)準(zhǔn),,工業(yè)機(jī)械臂定義為“其操作機(jī)是自動(dòng)控制的,,可重復(fù)編程、多用途,,并可以對(duì)3個(gè)以上軸進(jìn)行編程,。它可以是固定式或者移動(dòng)式。在工業(yè)自動(dòng)化應(yīng)用中使用”,。操作機(jī)又定義為“是一種機(jī)器,,其機(jī)構(gòu)通常由一系列相互鉸接或相對(duì)滑動(dòng)的構(gòu)件所組成。福建原裝晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇機(jī)械手臂是機(jī)械人技術(shù)領(lǐng)域中得到*****實(shí)際應(yīng)用的自動(dòng)化機(jī)械裝置.
半導(dǎo)體行業(yè),,尤其是集成電路領(lǐng)域,,晶圓的身影隨處可見。
晶圓就是一塊薄薄的,、圓形的高純硅晶片,,而在這種高純硅晶片上可以加工制作出各種電路元件結(jié)構(gòu),使之成為有特定電性功能的集成電路產(chǎn)品,。
眼前這密密麻麻的元器件,,被整整齊齊的安放在一塊單晶硅材料之上,都是規(guī)規(guī)矩矩,、方方正正的,。可見,,晶圓在實(shí)際應(yīng)用之中還是要被切割成方形的,。
所以疑問?來了——硅片為什么要做成圓的,?為什么是“晶圓”,而不做成“晶方”,?
要解釋這個(gè)問題,,有兩方面的原因:一方面似乎是由“基因決定的”;另一方面是“環(huán)境造成的”,。
工業(yè)機(jī)械臂定義為“其操作機(jī)是自動(dòng)控制的,,可重復(fù)編程、多用途,,并可以對(duì)3個(gè)以上軸進(jìn)行編程,。它可以是固定式或者移動(dòng)式。在工業(yè)自動(dòng)化應(yīng)用中使用”,。操作機(jī)又定義為“是一種機(jī)器,,其機(jī)構(gòu)通常由一系列相互鉸接或相對(duì)滑動(dòng)的構(gòu)件所組成。它通常有幾個(gè)自由度,,用以抓取或移動(dòng)物體(工具或工件),。”所以對(duì)工業(yè)機(jī)械臂可能理解為:擬人手臂,、手腕和手功能 的機(jī)械電子裝置,;它可把任一物件或工具按空間位姿(位置和姿態(tài))的時(shí)變要求進(jìn)行移動(dòng),從而完成某一工業(yè)生產(chǎn)的作業(yè)要求,。 吸臂具有高度可調(diào)節(jié)功能,,適應(yīng)不同尺寸的晶圓。
有用于輸送半導(dǎo)體晶圓的機(jī)械手,。具體地,,該機(jī)械手將半導(dǎo)體晶圓插入到處理室(process chamber),或者將半導(dǎo)體晶圓從處理室中取出,。傳送室(transfer chamber)連結(jié)于處理室,。機(jī)械手配置在該傳送室內(nèi)。利用機(jī)械手使半導(dǎo)體晶圓在傳送室與處理室之間移動(dòng),。傳送室相當(dāng)于小的無塵室,。傳送室防止灰塵等雜質(zhì)附著于半導(dǎo)體晶圓。在傳送室內(nèi)保持空氣(或者氣體)清潔,。另外,,傳送室內(nèi)有時(shí)被保持為真空。要求使在傳送室內(nèi)工作的機(jī)械手不產(chǎn)生雜質(zhì)的方法,。機(jī)械手臂應(yīng)用場(chǎng)景多在制造業(yè),。湛江晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇
工業(yè)機(jī)械臂的工作原理。湛江晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇
技術(shù)實(shí)現(xiàn)要素:
本實(shí)用新型要解決的技術(shù)問題是:現(xiàn)有機(jī)械手臂易出現(xiàn)碰撞損傷,,且傳送晶圓效率較低,。
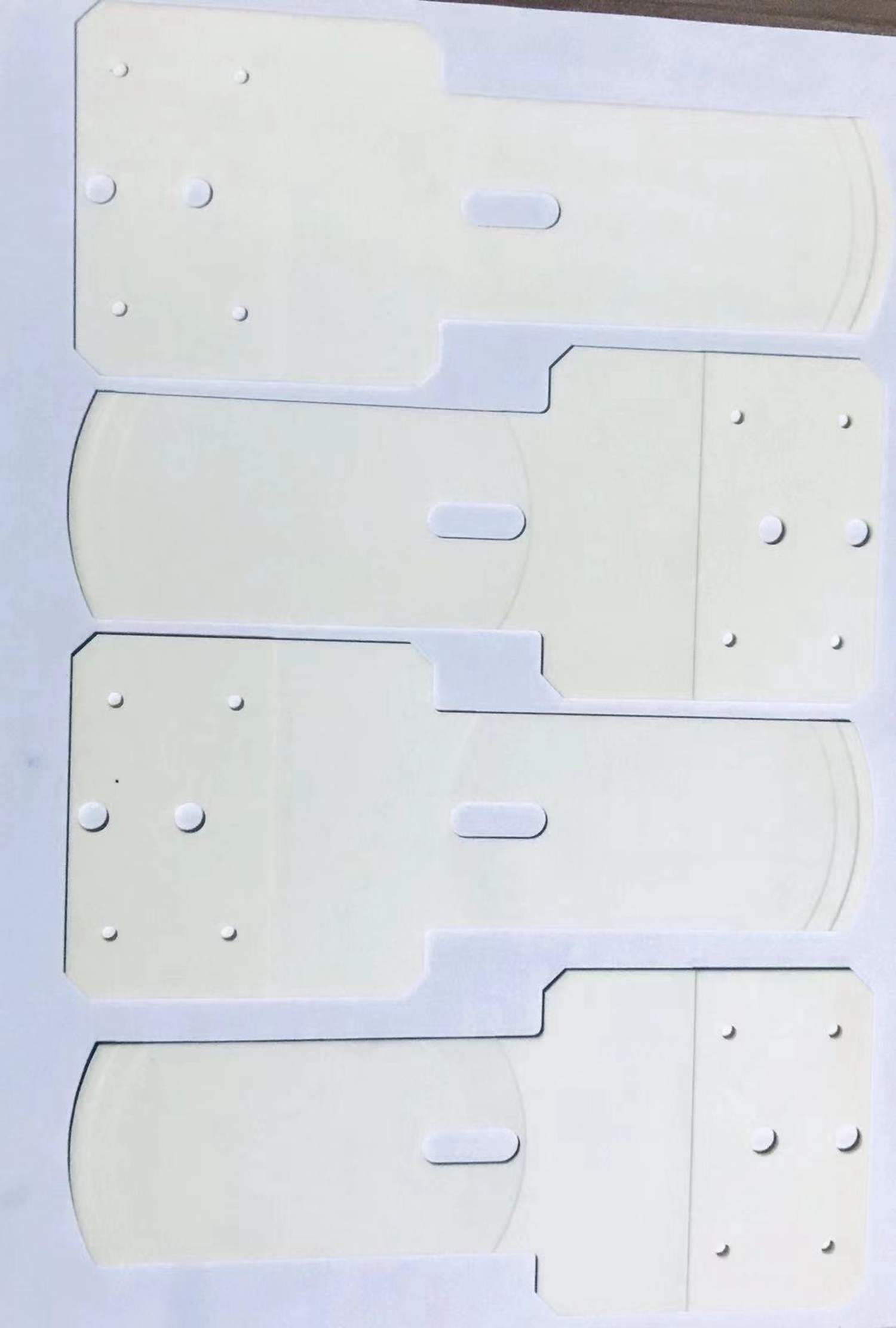
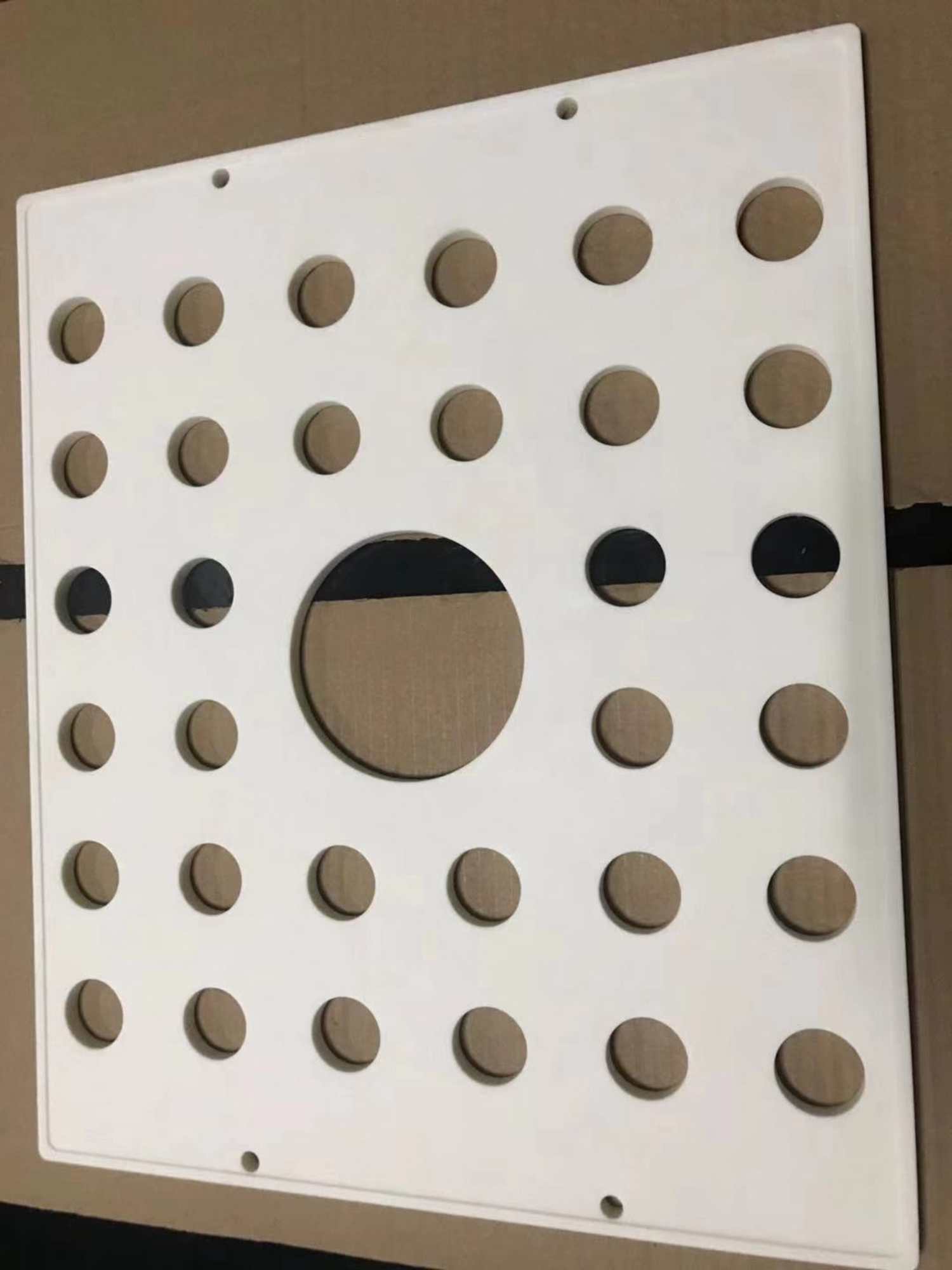
為了解決上述問題,,本實(shí)用新型的一個(gè)實(shí)施例提供了一種機(jī)械手臂,其包括:托板,;固定在所述托板上的絨毛墊,,所述絨毛墊至少部分裸露于所述托板的用于承載晶圓的表面,并適于在與所述表面之上的晶圓接觸時(shí)利用范德華力吸附晶圓,。
可選地,,所述絨毛墊包括托墊和絨毛,,所述托墊固定在所述托板上,,所述絨毛固定在所述托墊上。
可選地,,所述托板設(shè)有貫穿所述表面的螺紋通孔,,所述托墊嵌設(shè)在所述螺紋通孔內(nèi),并通過與所述螺紋通孔螺紋配合的螺釘固定在所述托板上,。
可選地,,所述絨毛為硅樹脂橡膠絨毛或聚酯樹膠絨毛。
可選地,,所述機(jī)械手臂上所有絨毛的黏合力之和為6N以上,。
可選地,所述絨毛墊上的絨毛排列成環(huán)形,。
可選地,,所述絨毛墊的數(shù)量為三個(gè)以上,各個(gè)所述絨毛墊之間間隔排布,。 湛江晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇
深圳市德澳美精密制造有限公司位于深圳市龍華區(qū)龍華街道清湖社區(qū)清湖安之龍工業(yè)園B棟201,。在市場(chǎng)經(jīng)濟(jì)的浪潮中拼博和發(fā)展,目前德澳美在機(jī)械及行業(yè)設(shè)備中擁有較高的**度,,享有良好的聲譽(yù),。德澳美取得全網(wǎng)商盟認(rèn)證,標(biāo)志著我們的服務(wù)和管理水平達(dá)到了一個(gè)新的高度,。德澳美全體員工愿與各界有識(shí)之士共同發(fā)展,,共創(chuàng)美好未來。
- 江蘇進(jìn)口晶圓運(yùn)送機(jī)械吸臂上門服務(wù) 2025-06-23
- 揭陽正規(guī)微孔陶瓷真空吸盤價(jià)格便宜 2025-06-23
- 肇慶進(jìn)口精密結(jié)構(gòu)陶瓷供應(yīng)商家 2025-06-23
- 江西微孔陶瓷真空吸盤價(jià)格信息 2025-06-23
- 湛江晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇 2025-06-23
- 汕尾新款精密結(jié)構(gòu)陶瓷經(jīng)銷批發(fā) 2025-06-22
- 江門原裝精密結(jié)構(gòu)陶瓷價(jià)格優(yōu)惠 2025-06-22
- 河源官方精密結(jié)構(gòu)陶瓷代理 2025-06-22
- 蘇州原裝微孔陶瓷真空吸盤價(jià)位 2025-06-22
- 浙江新款微孔陶瓷真空吸盤市場(chǎng)報(bào)價(jià) 2025-06-22
- 非標(biāo)定制空調(diào)價(jià)格多少 2025-06-23
- 福建鐵通清整翻新有幾種 2025-06-23
- 簡(jiǎn)便對(duì)夾視鏡產(chǎn)品 2025-06-23
- 上海自制防爆卷揚(yáng)機(jī) 2025-06-23
- 云南耐油食品膠管生產(chǎn) 2025-06-23
- 重慶物流倍速鏈輸送機(jī)設(shè)計(jì) 2025-06-23
- 廣東全位置管板焊機(jī) 2025-06-23
- 自動(dòng)化芝麻醬灌裝機(jī)采購 2025-06-23
- 江西滅菌鍋售后服務(wù) 2025-06-23
- 蘇州洗碗機(jī)怎么選 2025-06-23