廣東穩(wěn)定目標檢測解決
傳統(tǒng)的監(jiān)控系統(tǒng)需要依靠人對得到的監(jiān)控視頻進行分析,,耗時耗力,。智能監(jiān)控系統(tǒng)可以通過目標跟蹤,、識別等技術(shù)自動實現(xiàn)對目標場景的分析和異常檢測。隨著深度學習在計算機視覺領(lǐng)域的快速發(fā)展,,智能視頻分析技術(shù)已經(jīng)成為安防企業(yè)競爭的關(guān)鍵,,相關(guān)技術(shù)已經(jīng)達到非常高的精度。傳統(tǒng)安防技術(shù)更多的是關(guān)注事后查證的有效性,,但隨著高清攝像機的普及,,如何利用這些資源使設備“活”起來,已經(jīng)成為越來越多安防企業(yè)發(fā)展的重點,。有了視頻分析,,就可以及時發(fā)現(xiàn)視頻中的異常情況,從而及時做出反應,,減少損失,。AI智能算法如何實現(xiàn)輔助駕駛?廣東穩(wěn)定目標檢測解決
目標檢測
目標跟蹤是計算機視覺的一個重要分支,,其利用視頻或圖像序列的上下文信息,,對目標的外觀和運動信息進行建模,從而對目標運動狀態(tài)進行預測并標定目標的位置,。目標跟蹤融合了圖像處理,、機器學習、比較好化等多個領(lǐng)域的理論和算法,,是完成更高層級的圖像理解(如目標行為識別)任務的前提和基礎,。隨著計算機處理能力的飛速提升,各種基于目標跟蹤的民用和***系統(tǒng)紛紛落地,,廣泛應用于智能視頻監(jiān)控,、智能人機交互、智能交通,、視覺導航,、無人駕駛、無人自主飛行,、戰(zhàn)場態(tài)勢偵察等領(lǐng)域,。并結(jié)合多傳感器技術(shù),提高了對城市的主動監(jiān)視和對戰(zhàn)場的態(tài)勢感知能力,。能夠?qū)崿F(xiàn)多目標跟蹤并完成對目標行為的異常檢測,。開發(fā)出了能在復雜場景下的行人跟蹤和行為理解,以及可用于監(jiān)測,、引導交通流量并實現(xiàn)異常預警的公共交通管理系統(tǒng),。黑龍江靠譜的目標檢測生產(chǎn)企業(yè)慧視RK3399PRO板卡可以用于大型公共停車場。

國內(nèi)外安全形勢正在發(fā)生深刻復雜變化,。近年來,,我國安全問題的綜合性,、復雜性、多變性明顯增強,,我國陸地邊界和大陸海岸線長達4萬多公里,,沿邊沿海地區(qū)情況復雜,自然環(huán)境各異,,維護邊海防安全穩(wěn)定的任務繁重,。針對邊海防管理的需求,積極響應國家建設現(xiàn)代化邊海防的決策,,慧視光電成功研發(fā)生產(chǎn)系列國產(chǎn)化圖像檢測與跟蹤智能處理板卡,,是基于輸入的可見光或者紅外的視頻流,可實時對目標進行鎖定,,同時可以根據(jù)輸出目標的靶量信息,,對目標進行實時跟蹤??捎糜诜婪哆吘成细鞣N非法穿越,、打架斗毆、非法偷渡等,。
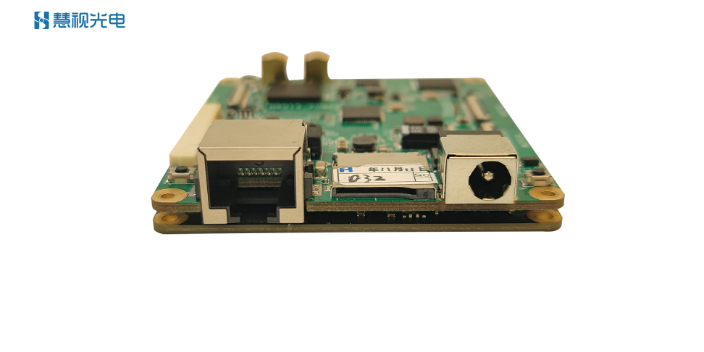
成都慧視光電技術(shù)有限公司基于國內(nèi)的ARMSOC芯片解決方案商瑞芯微處理器,,面向嵌入式領(lǐng)域推出處理模塊、顯控主板,、工控主板等硬件解決方案,,主板支持Android、Linux操作系統(tǒng),,支持適配國產(chǎn)統(tǒng)信和麒麟操作系統(tǒng),。例如RK3399處理板采用標準3.5寸嵌入式主板規(guī)范,尺寸146mm*105mm,,DC12V供電,。主板具有功耗低、體積小,、可快速產(chǎn)品化的特點,,可應用于機器視覺、零售管理,,車載網(wǎng)關(guān),,工業(yè)采集網(wǎng)關(guān)等嵌入式行業(yè)市場??蓮V泛應用于機載吊艙,、車載輔助、邊海防監(jiān)控,、森林防火,、電流巡檢,、智能周界等領(lǐng)域,?;垡暪怆婇_發(fā)的慧視AI圖像處理板,采用了國產(chǎn)高性能CPU,。
智能交通控制是“智慧城市”的關(guān)鍵內(nèi)容之一,。在城市的主干道,尤其是十字路口,,對車輛,、行人等目標的自動檢測與跟蹤是智能交通系統(tǒng)的重要任務,而基于深度學習的目標跟蹤技術(shù)在其中起著重要作用,,借助于云平臺,,能夠及時有效地實現(xiàn)對交通狀態(tài)的感知,從而提高整個城市的交通效能,。成都慧視光電技術(shù)有限公司專注于圖像處理領(lǐng)域,,在人工智能算法、激光雷達,、紅外圖像處理,、目標識別與追蹤、窄帶傳輸?shù)确矫娣e累了豐富的經(jīng)驗和成果,。研發(fā)團隊由行業(yè)沉淀了十余載的人員組成,,并與南京大學、電子科技大學等學府實驗室達成深度合作,,公司致力于成為基于圖像的智能方案提供商,。國產(chǎn)化處理板生產(chǎn)廠家—慧視光電。貴州可靠目標檢測互惠互利
國內(nèi)有哪些廠家可以提供全國產(chǎn)化的圖像識別模塊,?廣東穩(wěn)定目標檢測解決
無人駕駛汽車是計算機視覺技術(shù)應用的重要領(lǐng)域,。在自動駕駛過程中,通過對車道線,、前后方車輛和行人等目標的準確識別,,為更高級的行為選擇、障礙物規(guī)避以及路徑規(guī)劃功能提供了基礎,,這其中的一項關(guān)鍵技術(shù)就是目標跟蹤,。由于實際路況極為復雜,基于傳統(tǒng)目標檢測的輔助駕駛技術(shù)性能難以得到大幅提升,。隨著技術(shù)的發(fā)展,,采用深度學習可以直接學習和感知路面和道路上車輛的特征,經(jīng)過一段時間的正確駕駛過程,,便能學習和感知實際道路情況下的相關(guān)駕駛技能,,無需再通過感知具體的路況和各種目標,,大幅提升了輔助駕駛算法的性能。廣東穩(wěn)定目標檢測解決
- 云南放心目標跟蹤 2025-04-23
- 四川車載輔助圖像識別模塊解決方案 2025-04-23
- 西藏可靠目標檢測 2025-04-23
- 江西定制AI智能提供商 2025-04-23
- 云南目標檢測跟蹤 2025-04-23
- 廣東目標跟蹤服務電話 2025-04-23
- 信息化目標跟蹤多少錢 2025-04-23
- 人防目標檢測設備 2025-04-23
- 黑龍江目標跟蹤技術(shù) 2025-04-23
- 網(wǎng)絡目標跟蹤批發(fā)商 2025-04-23
- 基坑支護橋梁輕量化安全監(jiān)測儀器 2025-04-23
- 邊境高壓電網(wǎng)設計 2025-04-23
- 崇明區(qū)耐用輕便型無線通信設備推薦貨源 2025-04-23
- 多端控制高壓電網(wǎng)廠家電話 2025-04-23
- 徐州遠程視頻監(jiān)控收費標準 2025-04-23
- 山西GBIC光纖模塊貨源推薦 2025-04-23
- 肇慶本地通訊設備銷售規(guī)格尺寸 2025-04-23
- 江西2Gbps光模塊按需定制 2025-04-23
- 云南放心目標跟蹤 2025-04-23
- 濰坊小程序能源管理系統(tǒng)公司 2025-04-23