-
全自動金相切割機(jī)的切割精度與穩(wěn)定性分析-全自動金相切割機(jī)
-
全自動顯微維氏硬度計(jì)在電子元器件檢測中的重要作用
-
全自動顯微維氏硬度計(jì):提高材料質(zhì)量評估的關(guān)鍵工具
-
全自動維氏硬度計(jì)對現(xiàn)代制造業(yè)的影響?-全自動維氏硬度計(jì)
-
跨越傳統(tǒng)界限:全自動顯微維氏硬度計(jì)在復(fù)合材料檢測中的應(yīng)用探索
-
從原理到實(shí)踐:深入了解全自動顯微維氏硬度計(jì)的工作原理
-
全自動金相切割機(jī)在半導(dǎo)體行業(yè)的應(yīng)用前景-全自動金相切割機(jī)
-
全自動金相切割機(jī)的工作原理及優(yōu)勢解析-全自動金相切割機(jī)
-
全自動洛氏硬度計(jì)在材料科學(xué)研究中的應(yīng)用?-全自動洛氏硬度計(jì)
-
全自動維氏硬度計(jì)在我國市場的發(fā)展現(xiàn)狀及展望-全自動維氏硬度計(jì)
重慶快速圖像標(biāo)注
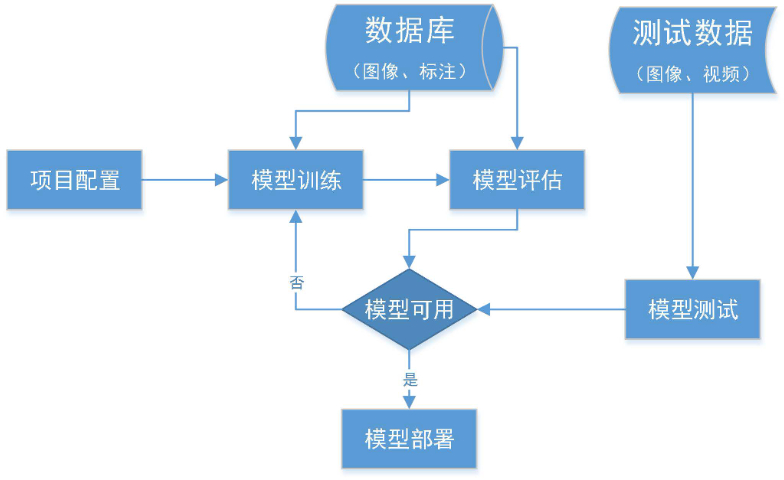
圖像標(biāo)注就是給圖像打上標(biāo)簽標(biāo)記,,例如矩形框等形式,在以前,,需要招聘專門的圖像標(biāo)注師,,隨著AI的不斷發(fā)展,,這個(gè)行業(yè)正發(fā)生翻天覆地的變化。人工智能利用計(jì)算機(jī)和機(jī)器模仿人類思維來解決問題或制定決策,。深度學(xué)習(xí)是人工智能的子領(lǐng)域,,深度學(xué)習(xí)算法模型由神經(jīng)網(wǎng)絡(luò)組成。通過學(xué)習(xí)樣本數(shù)據(jù)的特征表達(dá)以及數(shù)據(jù)分布實(shí)現(xiàn)能夠像人一樣具備分析和識別目標(biāo)的能力,。通常情況下,,AI開發(fā)的基本流程是從需求分析、數(shù)據(jù)制作,、模型訓(xùn)練,、測試驗(yàn)證再到***的模型部署這幾個(gè)步驟,而SpeedDP正式采用標(biāo)準(zhǔn)的AI開發(fā)流程,,從數(shù)據(jù)標(biāo)注到模型開發(fā),,然后進(jìn)行模型部署,來逐步實(shí)現(xiàn)自動化的圖像標(biāo)注,。AI自動標(biāo)注工具選SpeedDP,。重慶快速圖像標(biāo)注

隨著大模型時(shí)代到來,模型參數(shù)呈指數(shù)級增長,,達(dá)到萬億級別,。大模型逐漸從支持單一模態(tài)和任務(wù)發(fā)展為支持多種模態(tài)下的多種任務(wù)。在這種趨勢下,,大模型訓(xùn)練所需算力巨大,,遠(yuǎn)超單個(gè)芯片的處理速度,而多卡分布式訓(xùn)練通信損耗巨大,。如何提高硬件資源利用率,,成為影響國產(chǎn)大模型技術(shù)發(fā)展和實(shí)用性的重要前提,。成都慧視推出的AI訓(xùn)練平臺SpeedDP就可以通過大量的數(shù)據(jù)注入,讓AI進(jìn)行不斷的模型訓(xùn)練,,不斷地深度學(xué)習(xí)能夠讓AI更加聰明,,為目標(biāo)檢測、目標(biāo)識別提供幫助,。青海哪里有圖像標(biāo)注應(yīng)用SpeedDP能夠提升圖像標(biāo)注的效率,。

食品安全關(guān)乎人民的身體健康和生命安全,是民生大事,。在食品生產(chǎn)與流通的各個(gè)環(huán)節(jié)中,,食品檢測設(shè)備發(fā)揮著不可或缺的關(guān)鍵作用,為舌尖上的安全保駕護(hù)航,。從田間地頭的農(nóng)產(chǎn)品,,到生產(chǎn)線上的加工食品,再到超市貨架上的各類商品,,食品檢測設(shè)備猶如一位位忠誠的“衛(wèi)士”,,嚴(yán)格把關(guān)。在農(nóng)業(yè)生產(chǎn)環(huán)節(jié),,農(nóng)藥殘留快速檢測儀能快速,、精準(zhǔn)地檢測出果蔬上殘留的農(nóng)藥成分,確保農(nóng)產(chǎn)品符合安全標(biāo)準(zhǔn),,讓消費(fèi)者吃得放心,。而在食品加工企業(yè),高精度的微生物檢測設(shè)備可以對食品中的細(xì)菌,、霉菌等微生物指標(biāo)進(jìn)行監(jiān)測,,有效預(yù)防因微生物超標(biāo)引發(fā)的食品安全問題,保障產(chǎn)品質(zhì)量,。
SpeedDP作為一個(gè)服務(wù)型AI平臺,,它能提供從數(shù)據(jù)標(biāo)注、模型訓(xùn)練,、測試驗(yàn)證到RockChip嵌入式硬件平臺模型部署的可視化AI開發(fā)功能,。平臺所需算法并不是固定的,使用者可以根據(jù)自身實(shí)際應(yīng)用場景進(jìn)行AI算法的定制化開發(fā),,例如平臺經(jīng)過不斷的迭代,,目前能夠支持YOLOv8系列算法進(jìn)行圖像標(biāo)注。SpeedDP這個(gè)平臺使用起來十分簡便,,在圖像標(biāo)注領(lǐng)域其基本使用方法是:1.首先有一個(gè)比較好的預(yù)選模型2.用這個(gè)預(yù)選模型做自動標(biāo)注3.后期人工審核修正SpeedDP是一個(gè)降本增效的好平臺,。
RK3588作為瑞芯微旗艦級芯片,工業(yè)級的算力受到了很多領(lǐng)域的青睞,但是由于前端相機(jī)的選擇不同,,并不是每塊RK3588的圖像處理板都可以直接拿來使用,,需要的是根據(jù)相機(jī)接口和應(yīng)用場景進(jìn)行深度定制。成都慧視光電技術(shù)有限公司就有這樣的快速集成定制的能力,。作為擁有多年圖像處理板開發(fā)經(jīng)驗(yàn)的團(tuán)隊(duì),成都慧視能夠快速定制SDI,、CVBS,、CAMERALINK、USB,、LVDS,、DVP等豐富接口的RK3588系列圖像處理板,并能夠根據(jù)應(yīng)用環(huán)境定制外殼,、散熱器等,。YOLO系列算法是目標(biāo)識別領(lǐng)域很重要的技術(shù)之一。上海智能化圖像標(biāo)注產(chǎn)品
SpeedDP是一個(gè)基于瑞芯微的深度學(xué)習(xí)算法開發(fā)平臺,。重慶快速圖像標(biāo)注
多目標(biāo)跟蹤是指在連續(xù)的圖像中,,通過目標(biāo)檢測算法識別出每一幀中的目標(biāo),并在時(shí)間上跟蹤它們的位置和狀態(tài),。但目標(biāo)會不斷發(fā)生尺度,、形變、遮擋等變化,,而且還會有目標(biāo)出現(xiàn)和消失的情況,,再加上視頻采集端的相機(jī)所處環(huán)境可能受到外界影響導(dǎo)致抖動的情況(例如無人機(jī)高空檢測),就會給多目標(biāo)跟蹤造成一定的困難,。由于我們不能控制目標(biāo),,所以只能從視頻采集端維護(hù)跟蹤的穩(wěn)定性。因此,,成都慧視針對于多目標(biāo)檢測跟蹤抖動丟失的優(yōu)化方法是:1.改進(jìn)目標(biāo)檢測,使用更加魯棒的目標(biāo)檢測算法,。2.增強(qiáng)特征描述,利用深度學(xué)習(xí)提取更高級別的語義特征,,這些特征對于小范圍內(nèi)的視角變化具有更好的不變性3.改進(jìn)運(yùn)動模型,,在算法中加入對攝像頭運(yùn)動的估計(jì),通過補(bǔ)償攝像頭運(yùn)動來減小目標(biāo)真實(shí)運(yùn)動與預(yù)測之間的差距,。4.數(shù)據(jù)關(guān)聯(lián)策略,,設(shè)計(jì)更靈活的數(shù)據(jù)關(guān)聯(lián)算法,允許更大的距離閾值來匹配候選目標(biāo),。重慶快速圖像標(biāo)注
- 質(zhì)量圖像處理板功能 2025-06-05
- 視頻圖像處理板檢測 2025-06-05
- 附近圖像處理板工程 2025-06-04
- 寧夏無源目標(biāo)識別系統(tǒng) 2025-06-04
- 遼寧視頻識別AI智能服務(wù)平臺 2025-06-04
- 青海圖像處理板服務(wù)電話 2025-06-04
- 專業(yè)圖像處理板工程 2025-06-04
- 河北質(zhì)量圖像處理板 2025-06-04
- 數(shù)據(jù)圖像處理板性價(jià)比 2025-06-04
- 智能化圖像處理板常見問題 2025-06-04
- 徐州機(jī)構(gòu)視頻監(jiān)控服務(wù)商 2025-06-05
- 棗莊設(shè)備全生命周期管理應(yīng)用 2025-06-05
- 質(zhì)量圖像處理板功能 2025-06-05
- 北京實(shí)驗(yàn)教學(xué)與管理實(shí)驗(yàn)教學(xué)軟件定制 2025-06-05
- 靜安區(qū)本地?zé)o線路由器價(jià)位 2025-06-05
- 鐵藝圍欄振動光纖訂制價(jià)格 2025-06-05
- 廣東音視頻記錄儀代加工私人定做 2025-06-05
- 肇慶附近通訊設(shè)備銷售量大從優(yōu) 2025-06-05
- 上海放大器系列芯片技術(shù)服務(wù) 2025-06-05
- 徐州人員定位防爆手機(jī)哪家劃算 2025-06-05