陜西客車主動安全預(yù)警系統(tǒng)定制開發(fā)
自帶算法的ADAS(Advanced Driver Assistance Systems)防碰撞預(yù)警系統(tǒng)是一種集成了多種傳感器技術(shù)和智能算法的汽車安全系統(tǒng),。它的主要功能是通過實時監(jiān)測車輛周圍的環(huán)境信息,,預(yù)測潛在的碰撞風(fēng)險,并向駕駛員發(fā)出預(yù)警,。系統(tǒng)的詳細(xì)功能介紹:
1. 實時監(jiān)測與數(shù)據(jù)分析傳
ADAS防碰撞預(yù)警系統(tǒng)通常集成了多種傳感器,,如雷達(dá)、激光雷達(dá)(LiDAR),、攝像頭和超聲波傳感器等,。這些傳感器能夠?qū)崟r收集車輛前方的距離、速度,、障礙物類型等信息。收集到的數(shù)據(jù)被傳輸?shù)较到y(tǒng)的控制單元,,該單元利用內(nèi)置的算法對數(shù)據(jù)進(jìn)行處理和分析,。算法能夠識別出潛在的碰撞風(fēng)險,如前方車輛突然減速,、行人橫穿道路等,。
2. 預(yù)警
當(dāng)系統(tǒng)檢測到潛在的碰撞風(fēng)險時,會首先通過聲音,、視覺或觸覺方式向駕駛員發(fā)出預(yù)警,。
3. 多場景應(yīng)用
ADAS防碰撞預(yù)警系統(tǒng)能夠有效地應(yīng)對行人橫穿、車輛突然變道等復(fù)雜情況,,提高駕駛安全性,。在高速公路上,系統(tǒng)能夠保持與前車的安全距離,,避免追尾事故的發(fā)生,。在雨雪霧等惡劣天氣條件下,ADAS防碰撞預(yù)警系統(tǒng)的性能依然穩(wěn)定可靠,,系統(tǒng)還能夠與云端平臺進(jìn)行數(shù)據(jù)共享和更新,。通過收集大量車輛行駛數(shù)據(jù)和碰撞事故案例,,云端平臺可以對算法進(jìn)行持續(xù)優(yōu)化和升級,以提高整個系統(tǒng)的性能和安全性,。
主動安全預(yù)警車載云臺監(jiān)控系統(tǒng)云服務(wù)器可以對車輛的運(yùn)行數(shù)據(jù)進(jìn)行記錄和分析,這些報表和圖表幫助了解車輛.陜西客車主動安全預(yù)警系統(tǒng)定制開發(fā)
主動安全預(yù)警系統(tǒng)
(上篇)4G 360全景影像集成ADAS防碰撞預(yù)警及疲勞駕駛預(yù)警的應(yīng)用效果非常顯ZHU,,主要體現(xiàn)在以下幾個方面:
一、提升駕駛安全性全方W視野監(jiān)控:
4G 360全景影像系統(tǒng)通過安裝在車輛四周的多個高清攝像頭,,實時捕捉并拼接車輛周圍的全景圖像,,為駕駛員提供無盲區(qū)的視野。這種全景監(jiān)控能力極大地提高了駕駛員在行車和泊車過程中的安全性,,使駕駛員能夠及時發(fā)現(xiàn)并避免潛在的危險,,如行人、其他車輛或障礙物等,。集成的ADAS系統(tǒng)能夠?qū)崟r監(jiān)測車輛前方的交通狀況,,包括車輛、行人,、障礙物等,。通過計算車輛與前方物體的距離、速度差等參數(shù),,ADAS系統(tǒng)能夠評估碰撞的可能性,,并在必要時向駕駛員發(fā)出預(yù)警。這種預(yù)警功能有助于駕駛員提前采取措施,,避免碰撞事故的發(fā)生,。
二、增強(qiáng)駕駛輔助能力智能泊車輔助:
在泊車過程中,,4G 360全景影像系統(tǒng)能夠自動識別車位,,并提供倒車入庫、側(cè)方停車等操作的指導(dǎo),。結(jié)合ADAS系統(tǒng)的輔助,,駕駛員可以更加輕松、安全地完成泊車操作,。疲勞駕駛預(yù)警系統(tǒng)通過實時監(jiān)測駕駛員的面部特征,、眼部信號、頭部運(yùn)動性等,,判斷駕駛員是否存在疲勞駕駛的情況,。一旦檢測到疲勞駕駛,系統(tǒng)會及時發(fā)出警報,,提醒駕駛員注意休息,,從而有效預(yù)防因疲勞駕駛導(dǎo)致的交通事故。 山東物聯(lián)網(wǎng)主動安全預(yù)警系統(tǒng)方案商疲勞駕駛預(yù)警融合MDVR系統(tǒng),通過系統(tǒng)架構(gòu)設(shè)計,數(shù)據(jù)采集傳輸,處理分析,預(yù)警與網(wǎng)絡(luò)通訊實現(xiàn)遠(yuǎn)程實時監(jiān)控管理.
(上篇)RTSP(Real Time Streaming Protocol,,實時流傳輸協(xié)議)視頻流在360全景影像中擁有廣泛的應(yīng)用場景,。以下是一些主要的應(yīng)用實例:
1. 實時監(jiān)控與遠(yuǎn)程查看全景監(jiān)控:在全MIAN監(jiān)控的場合,,如大型活動、公共場所或關(guān)鍵區(qū)域,,RTSP視頻流能夠?qū)崟r傳輸360度全景視頻數(shù)據(jù),。客戶端(如監(jiān)控中心或移動設(shè)備)通過發(fā)送RTSP請求給服務(wù)器,,服務(wù)器則根據(jù)請求將實時全景視頻流傳輸給客戶端進(jìn)行播放,,實現(xiàn)無死角的實時監(jiān)控。RTSP協(xié)議允許遠(yuǎn)程用戶通過網(wǎng)絡(luò)訪問監(jiān)控系統(tǒng)中的全景攝像頭,,并控制其操作,,如調(diào)整鏡頭、更改焦距,、啟動或停止錄像等,。
2. 直播與錄像回放全景直播:通過RTSP協(xié)議,360全景影像系統(tǒng)可以實現(xiàn)實時直播功能,。RTSP還支持錄像回放功能,。通過發(fā)送特定的RTSP請求來請求存儲在硬盤錄像機(jī)(DVR)或其他存儲設(shè)備中的全景錄像數(shù)據(jù),并進(jìn)行回放,。
3. 多播與轉(zhuǎn)播多播與轉(zhuǎn)播功能:當(dāng)需要向多個用戶同時傳送相同的全景視頻流時,,RTSP可以實現(xiàn)多播或轉(zhuǎn)播。RTSP能夠有效地管理帶寬,,減少網(wǎng)絡(luò)擁堵,,并提高視頻流傳輸?shù)男省?
(專輯二)ONVIF協(xié)議與RTSP視頻流在360全景影像中的應(yīng)用原理密切相關(guān),它們共同為車載360全景影像系統(tǒng)提供了高效,、標(biāo)準(zhǔn)化的視頻傳輸與控制方案,。以下是詳細(xì)的應(yīng)用原理:
二、RTSP視頻流的作用實時流傳輸協(xié)議:RTSP(Real Time Streaming Protocol)是一種用于在互聯(lián)網(wǎng)上控制實時多媒體流傳輸?shù)膮f(xié)議,。它允許客戶端控制多媒體播放器(如視頻監(jiān)控攝像頭)的行為,如播放,、暫停,、停止和定位等。RTSP主要負(fù)責(zé)媒體流的控制和管理,,但不直接傳輸音視頻數(shù)據(jù),。音視頻數(shù)據(jù)的實際傳輸通常通過RTP(Real-time Transport Protocol)等協(xié)議來實現(xiàn)。視頻流控制:在360全景影像系統(tǒng)中,,RTSP協(xié)議用于建立和控制視頻流的傳輸,。通過RTSP,客戶端可以請求服務(wù)器發(fā)送視頻流,,并控制流的播放,、暫停,、停止等操作。RTSP提供了諸如OPTIONS,、DESCRIBE,、SETUP、PAUSE,、TEARDOWN等方法,,用于實現(xiàn)視頻流的會話建立、參數(shù)協(xié)商,、流控制等功能,。 車侶主動安全預(yù)警系統(tǒng)中毫米波的作用是什么?

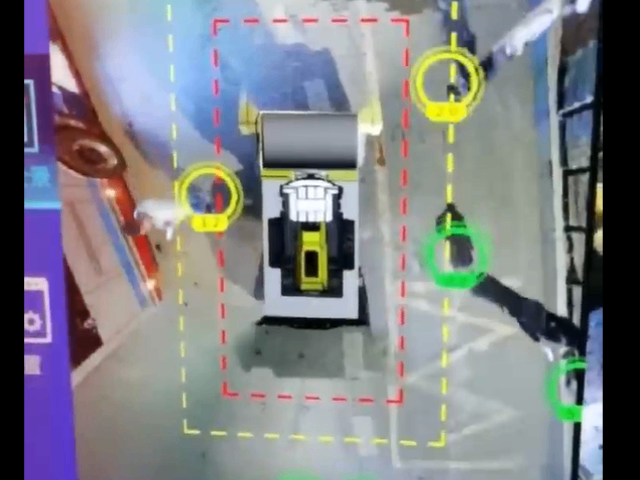
(專輯三)360全景影像與視覺盲區(qū)預(yù)警的集成功能在物流車的應(yīng)用中,,展現(xiàn)出了顯ZHU的優(yōu)勢,,極大地提升了物流車作業(yè)的安全性和效率。以下是該功能在物流車應(yīng)用中的詳細(xì)闡述:
三,、應(yīng)用實例與效果360全景影像與視覺盲區(qū)預(yù)警的集成功能已經(jīng)廣泛應(yīng)用于各種物流車輛中,,如叉車、鏟車,、裝載機(jī),、卡車、貨車等,。這些系統(tǒng)在實際應(yīng)用中取得了顯ZHU的效果,,不僅提高了物流作業(yè)的安全性,還降低了事故發(fā)生率,,為物流行業(yè)的安全,、高效發(fā)展提供了有力保障。
綜上所述,,360全景影像與視覺盲區(qū)預(yù)警的集成功能在物流車的應(yīng)用中具有重要意義,,是提升物流作業(yè)安全性和效率的重要手段之一。隨著技術(shù)的不斷進(jìn)步和應(yīng)用場景的拓展,,相信這一功能將在未來發(fā)揮更加重要的作用,。 叉車專YONG4G智能一體機(jī)集成了車載視頻監(jiān)控,行車記錄儀,DSM駕駛員狀態(tài)分析系統(tǒng),BSD盲區(qū)監(jiān)控等功能于一體.山東叉車主動安全預(yù)警系統(tǒng)開發(fā)平臺
車侶主動安全預(yù)警系統(tǒng)的安裝指導(dǎo)熱線是多少?陜西客車主動安全預(yù)警系統(tǒng)定制開發(fā)
(上篇)叉車防撞預(yù)警系統(tǒng)的后臺管理實現(xiàn),,主要依賴于一系列科學(xué)的技術(shù)手段和管理策略,,以確保系統(tǒng)的穩(wěn)定運(yùn)行和高效管理。
一,、系統(tǒng)架構(gòu)設(shè)計數(shù)據(jù)采集層:通過安裝在叉車上的各種傳感器(如攝像頭,、毫米波雷達(dá)、UWB無線通信設(shè)備等)實時采集叉車周圍環(huán)境的數(shù)據(jù),包括人員,、車輛的位置,、速度等信息。數(shù)據(jù)處理層:利用AI邊緣計算,、深度學(xué)習(xí)等先進(jìn)技術(shù),,對采集到的數(shù)據(jù)進(jìn)行快速處理和分析,識別出潛在的危險情況,,并生成相應(yīng)的預(yù)警信號,。決策控制層:根據(jù)處理層的結(jié)果,決策控制層會發(fā)出相應(yīng)的控制指令,,如限制車速,、發(fā)出聲光報警等,以避免碰撞事故的發(fā)生,。后臺管理層:作為整個系統(tǒng)的HEXIN,,后臺管理層負(fù)責(zé)數(shù)據(jù)的存儲、分析,、展示以及系統(tǒng)的配置和維護(hù),。
二、后臺管理功能實現(xiàn)數(shù)據(jù)存儲與分析:實時存儲來自前端設(shè)備的數(shù)據(jù),,包括視頻,、雷達(dá)數(shù)據(jù)等。對數(shù)據(jù)進(jìn)行深度分析,,識別出叉車作業(yè)中的潛在風(fēng)險,,如超速、違規(guī)操作等,。提供數(shù)據(jù)報表和可視化界面,,幫助管理人員直觀了解叉車作業(yè)情況。系統(tǒng)配置與維護(hù):支持遠(yuǎn)程配置系統(tǒng)參數(shù),,如預(yù)警距離,、報警閾值等。實時監(jiān)控前端設(shè)備的運(yùn)行狀態(tài),,及時發(fā)現(xiàn)并處理設(shè)備故障,。提供系統(tǒng)升級和補(bǔ)丁管理功能,確保系統(tǒng)始終保持ZUIXIN狀態(tài),。 陜西客車主動安全預(yù)警系統(tǒng)定制開發(fā)
- 中國香港司機(jī)行為檢測預(yù)警系統(tǒng)作用 2025-06-06
- 天津傳祺防司機(jī)行為檢測預(yù)警系統(tǒng) 2025-06-06
- 河南AI多路視頻拼接系統(tǒng)定制開發(fā) 2025-06-06
- 攪拌車多路360全景影像加裝 2025-06-06
- 正面吊6路360全景影像系統(tǒng)廠家供應(yīng) 2025-06-06
- 遼寧建筑物多路視頻拼接系統(tǒng)開發(fā)平臺 2025-06-06
- 寧夏疲勞駕駛預(yù)警系統(tǒng)技術(shù)解決方案 2025-06-06
- 攪拌車360全景影像設(shè)備品牌 2025-06-06
- 礦車6路360全景影像系統(tǒng)采購 2025-06-06
- 貴州橋梁多路視頻拼接系統(tǒng)開發(fā)商 2025-06-06
- 中國香港司機(jī)行為檢測預(yù)警系統(tǒng)作用 2025-06-06
- 充氣產(chǎn)品星期日車服務(wù)APP意義 2025-06-06
- 湖北鋁合金鍛壓加工工藝視頻 2025-06-06
- 內(nèi)蒙古工程加熱項目加熱片品牌 2025-06-06
- 遼寧電動車窗剎車線出廠價 2025-06-06
- 上海高溫爐密封墊片工廠直銷 2025-06-06
- 淄博汽車燈總成 2025-06-06
- 海南農(nóng)業(yè)機(jī)械駐車制動剎車線廠家 2025-06-06
- 豪華轎車星期日車服務(wù)APP廠家價格 2025-06-06
- 寧波金屬精密鍛件價格 2025-06-06