遼寧5G疲勞駕駛預(yù)警系統(tǒng)
(上篇)車載自帶算法的疲勞駕駛預(yù)警集成MDVR實現(xiàn)云臺管理的原理
車載疲勞駕駛預(yù)警系統(tǒng)與MDVR(MobileDigitalVideoRecorder,移動數(shù)字視頻錄像機(jī))集成,結(jié)合云臺管理,,可以實現(xiàn)對駕駛員狀態(tài)的實時監(jiān)控、數(shù)據(jù)存儲和遠(yuǎn)程管理,。以下是其工作原理和實現(xiàn)細(xì)節(jié):
1.系統(tǒng)架構(gòu)集成MDVR的疲勞駕駛預(yù)警系統(tǒng)主要包括以下模塊:
-攝像頭模塊:用于采集駕駛員面部圖像和車內(nèi)環(huán)境視頻,。
-云臺控制模塊:調(diào)整攝像頭角度,確保ZUI佳監(jiān)控范圍,。
-MDVR模塊:負(fù)責(zé)視頻錄制,、存儲和傳輸。-疲勞檢測算法模塊:實時分析駕駛員狀態(tài),,判斷是否疲勞,。
-通信模塊:實現(xiàn)車載設(shè)備與云平臺的數(shù)據(jù)傳輸。
-云平臺:用于遠(yuǎn)程管理,、數(shù)據(jù)分析和預(yù)警通知,。
2.工作原理
2.1數(shù)據(jù)采集-攝像頭采集:-攝像頭實時捕捉駕駛員面部圖像,用于疲勞檢測,。-同時錄制車內(nèi)環(huán)境視頻,,存儲到MDVR中。-傳感器數(shù)據(jù):-結(jié)合方向盤傳感器,、車速傳感器等,,提供輔助判斷數(shù)據(jù)。
2.2疲勞檢測算法-實時分析:-車載終端運行輕量化的疲勞檢測算法,,分析攝像頭采集的圖像,。-檢測指標(biāo)包括閉眼頻率、打哈欠次數(shù),、頭部姿態(tài)等,。-多模態(tài)融合:-結(jié)合傳感器數(shù)據(jù)(如方向盤轉(zhuǎn)動頻率、車速變化),提高檢測準(zhǔn)確性,。 疲勞駕駛預(yù)警系統(tǒng)具備自動校準(zhǔn)功能,能夠根據(jù)環(huán)境變化調(diào)整圖像參數(shù),以保持識別精度.遼寧5G疲勞駕駛預(yù)警系統(tǒng)
疲勞駕駛預(yù)警系統(tǒng)
(中篇)自帶算法的疲勞駕駛預(yù)警系統(tǒng)是一種先進(jìn)的技術(shù),,旨在通過監(jiān)測駕駛員的疲勞狀態(tài)并及時發(fā)出預(yù)警,以提高駕駛安全,。該系統(tǒng)具有豐富的外WEI設(shè)備聯(lián)動接口,,可以連接多種設(shè)備以實現(xiàn)全方WEI的預(yù)警和管理功能。以下是對該系統(tǒng)可連接的方向盤振動器,、座椅振動器以及MDVR平臺進(jìn)行詳細(xì)闡述:
實時監(jiān)控:MDVR平臺可以實時接收并顯示駕駛員的疲勞狀態(tài),、車輛行駛軌跡、速度等關(guān)鍵信息,,為管理人員提供全MIAN的監(jiān)控視野,。數(shù)據(jù)分析:利用大數(shù)據(jù)分析技術(shù),MDVR平臺可以對存儲的數(shù)據(jù)進(jìn)行深入挖掘和分析,,生成疲勞駕駛統(tǒng)計報表、車輛行駛軌跡圖等關(guān)鍵信息,,為車隊管理和安全駕駛提供有力支持,。遠(yuǎn)程管理:管理人員可以通過MDVR平臺對車輛和駕駛員進(jìn)行遠(yuǎn)程監(jiān)控和管理,包括查看實時視頻畫面,、調(diào)整攝像頭角度和焦距,、接收預(yù)警信息等。應(yīng)急指揮:在緊急情況下,,管理人員可以通過MDVR平臺進(jìn)行遠(yuǎn)程指揮和調(diào)度,,確保車輛和人員的安全。
陜西國內(nèi)司機(jī)行為檢測預(yù)警系統(tǒng)主流疲勞駕駛預(yù)警系統(tǒng)適用于多種類型的車輛,包括長途客/貨運車,危險品運輸車輛,校車,出租車,公交車和家用轎車.

(上篇)高自帶算法的疲勞駕駛預(yù)警系統(tǒng)是一種智能化的安全設(shè)備,,它能夠通過分析駕駛員的生理特征,、駕駛行為及車輛行駛狀態(tài)等信息,實時監(jiān)測駕駛員的疲勞狀態(tài),,并在必要時發(fā)出預(yù)警信號,。以下是對該系統(tǒng)的報警狀態(tài)及報警參數(shù)的詳細(xì)闡述:
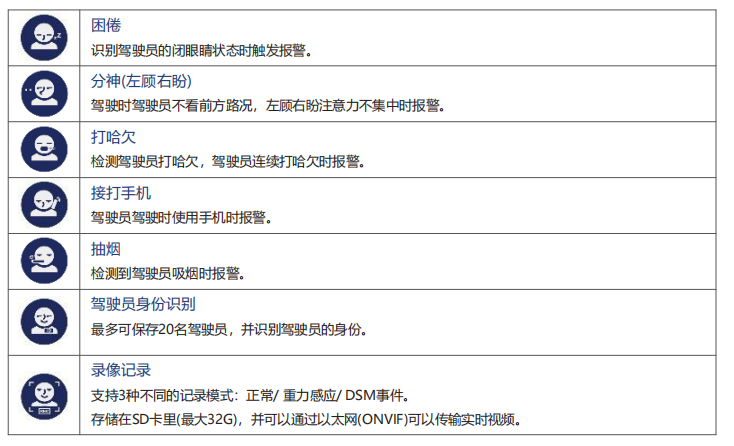
一、報警狀態(tài)疲勞駕駛預(yù)警:當(dāng)系統(tǒng)檢測到駕駛員處于疲勞狀態(tài)時,,會立即觸發(fā)預(yù)警,。疲勞狀態(tài)的判斷通常基于駕駛員的面部特征(如眨眼頻率,、閉眼時間,、頭部運動等)、眼部信號,、體態(tài)特征以及車輛行駛狀態(tài)等信息,。報警方式可能包括語音提示、震動提醒,、燈光閃爍等,,以引起駕駛員的注意并促使其采取休息措施,。分心駕駛預(yù)警:當(dāng)系統(tǒng)檢測到駕駛員在駕駛過程中分心(如長時間低頭看手機(jī)、與乘客交談等)時,,也會觸發(fā)預(yù)警,。分心駕駛的判定通常依賴于對駕駛員視線方向、頭部位置及動作等信息的分析,。其他預(yù)警:除了疲勞駕駛和分心駕駛預(yù)警外,,一些先進(jìn)的系統(tǒng)還可能具備打電話預(yù)警、抽煙預(yù)警,、未系安全帶預(yù)警以及攝像頭遮擋預(yù)警等功能,。這些預(yù)警的觸發(fā)條件和報警方式因系統(tǒng)而異,但通常都是為了提高駕駛安全性而設(shè)計的,。
二,、報警參數(shù)觸發(fā)條件:速度范圍:系統(tǒng)通常會在車輛速度處于一定范圍內(nèi)時(如10km/h到180km/h)進(jìn)行監(jiān)測和預(yù)警。
(下篇)在疲勞駕駛集成MDVR系統(tǒng)中,,TTS喇叭和對講手柄是怎樣通過智慧云平臺下發(fā)指令對車端進(jìn)行交互控制,,監(jiān)控實時作業(yè)情況?
三,、監(jiān)控實時作業(yè)情況
1.視頻采集與傳輸:MDVR系統(tǒng)持續(xù)采集車內(nèi)外視頻數(shù)據(jù),,并通過無線網(wǎng)絡(luò)將其傳輸給智慧云平臺。云平臺接收到視頻數(shù)據(jù)后,,進(jìn)行存儲,、分析和展示,以便用戶能夠?qū)崟r監(jiān)控車輛的作業(yè)情況,。
2.狀態(tài)反饋與報警:MDVR系統(tǒng)還負(fù)責(zé)監(jiān)測車輛的狀態(tài)信息(如車速,、發(fā)動機(jī)狀態(tài)等)以及駕駛員的行為(如疲勞駕駛檢測)。一旦發(fā)現(xiàn)異常情況或違規(guī)行為,,MDVR系統(tǒng)將立即向云平臺發(fā)送報警信息,。云平臺接收到報警信息后,可以實時通知用戶或采取其他措施進(jìn)行處理,。
綜上所述,,在疲勞駕駛集成MDVR系統(tǒng)中,TTS喇叭和對講手柄通過智慧云平臺下發(fā)指令對車端進(jìn)行交互控制,,并監(jiān)控實時作業(yè)情況的過程涉及多個技術(shù)環(huán)節(jié)和設(shè)備的協(xié)同工作,。這些設(shè)備和技術(shù)共同構(gòu)成了一個高效、智能的監(jiān)控系統(tǒng),,為交通安全和作業(yè)效率提供了有力保障,。 車載疲勞駕駛預(yù)警系統(tǒng)集成MDVR實現(xiàn)云臺管理,其核XIN在于疲勞檢測算法,云臺控制邏輯和MDVR的高效集成.
(專輯一)自帶算法的疲勞駕駛預(yù)警系統(tǒng)的技術(shù)原理主要基于先進(jìn)的視覺識別技術(shù)和深度學(xué)習(xí)算法。
一、核XIN技術(shù)與流程視覺識別技術(shù):系統(tǒng)通過安裝在車內(nèi)的攝像頭實時捕捉駕駛員的面部及肢體動作,,如眼睛閉合,、眨眼頻率、打哈欠,、頭部姿態(tài)等,。攝像頭捕捉到的圖像會被快速傳輸?shù)较到y(tǒng)的處理單元。系統(tǒng)利用深度學(xué)習(xí)技術(shù)對這些圖像數(shù)據(jù)進(jìn)行處理和分析,。通過深度卷積神經(jīng)網(wǎng)絡(luò)(CNN)等算法提取面部關(guān)鍵區(qū)域的視覺特征,,如眼睛、嘴巴等,。算法會分析眼睛的開合程度,、閉合時間、眨眼頻率以及打哈欠的頻率等關(guān)鍵指標(biāo),?;谶@些分析,系統(tǒng)準(zhǔn)確地判斷駕駛員是否處于疲勞狀態(tài),。
二,、算法模型構(gòu)建數(shù)據(jù)收集:為了構(gòu)建有效的算法模型,需要收集大量關(guān)于疲勞駕駛時駕駛員面部和身體特征的圖像數(shù)據(jù),。這些數(shù)據(jù)應(yīng)包括不同駕駛員在不同疲勞程度下的表現(xiàn),以確保算法的泛化能力和準(zhǔn)確性,。利用深度學(xué)習(xí)技術(shù)從圖像數(shù)據(jù)中提取與疲勞相關(guān)的關(guān)鍵特征,,并進(jìn)行分類標(biāo)注。這些特征包括眼睛的開合程度,、眨眼頻率,、打哈欠的頻率等。使用標(biāo)注好的數(shù)據(jù)對算法模型進(jìn)行訓(xùn)練,,通過不斷調(diào)整和優(yōu)化模型參數(shù),,提高模型的準(zhǔn)確性和魯棒性。在訓(xùn)練過程中,,會采用交叉驗證等方法來評估模型的性能,,確保其在不同場景下的適用性。
當(dāng)系統(tǒng)檢測到駕駛員處于疲勞狀態(tài)時,會立即通過方向盤振動器和座椅振動器向駕駛員發(fā)出預(yù)警信號.遼寧5G疲勞駕駛預(yù)警系統(tǒng)
疲勞駕駛預(yù)警系統(tǒng)基于圖像智能識別分析技術(shù),實時檢測駕駛員的頭部及眼皮運動,凝視方向,打哈欠等狀態(tài).遼寧5G疲勞駕駛預(yù)警系統(tǒng)
(上篇)在疲勞駕駛集成MDVR系統(tǒng)中,,TTS喇叭和對講手柄是怎樣通過智慧云平臺下發(fā)指令對車端進(jìn)行交互控制,,監(jiān)控實時作業(yè)情況?
在疲勞駕駛集成MDVR(MobileDigitalVideoRecorders,,車載數(shù)字視頻錄像機(jī))系統(tǒng)中,,TTS喇叭和對講手柄通過智慧云平臺下發(fā)指令對車端進(jìn)行交互控制,并監(jiān)控實時作業(yè)情況的過程,涉及多個技術(shù)環(huán)節(jié)和設(shè)備的協(xié)同工作,。以下是對這一過程的詳細(xì)解析:
一,、系統(tǒng)架構(gòu)與組件功能
1.智慧云平臺:作為整個系統(tǒng)的控制中心,云平臺負(fù)責(zé)接收,、處理并下發(fā)指令給車端設(shè)備,。它提供API接口,用于接收來自用戶或其他系統(tǒng)的請求,,并根據(jù)請求內(nèi)容生成相應(yīng)的控制指令,。
2.MDVR系統(tǒng):安裝在車輛上,負(fù)責(zé)采集,、存儲和傳輸車內(nèi)外視頻數(shù)據(jù),,同時具備GPS定位、無線傳輸?shù)裙δ?。MDVR系統(tǒng)作為車端的核XIN設(shè)備,,與云平臺進(jìn)行通信,接收并執(zhí)行來自云平臺的指令,。
3.TTS喇叭:文本到語音(TextToSpeech)的合成設(shè)備,,用于將云平臺下發(fā)的文本指令轉(zhuǎn)化為語音信號,以便駕駛員能夠聽到并執(zhí)行,。
4.對講手柄:用于駕駛員與云平臺或其他車輛進(jìn)行語音通信的設(shè)備,。它通常具有PTT(PushToTalk)功能,即按住按鈕即可說話,,松開按鈕則停止說話,。 遼寧5G疲勞駕駛預(yù)警系統(tǒng)
- 江蘇司機(jī)行為檢測預(yù)警系統(tǒng)作用 2025-06-03
- 中國香港建筑物多路視頻拼接系統(tǒng)技術(shù)解決方案 2025-06-03
- 龍門架360全景影像銷售 2025-06-03
- 貴州卡車多路視頻拼接系統(tǒng)廠家供應(yīng) 2025-06-02
- 車用360影像系統(tǒng)品牌 2025-06-02
- 北京AI多路視頻拼接系統(tǒng)推薦廠家 2025-06-02
- 中國香港司機(jī)行為檢測預(yù)警系統(tǒng)英文 2025-06-02
- 商用車8路360全景影像系統(tǒng)品牌 2025-06-02
- 湖北司機(jī)行為檢測預(yù)警系統(tǒng)廠家供應(yīng) 2025-06-02
- 中國香港360全景多路視頻拼接系統(tǒng)生產(chǎn)廠家 2025-06-02
- 萊蕪前大燈升級 2025-06-03
- 四川進(jìn)口遠(yuǎn)征者500客服電話 2025-06-03
- 宿州德莎68626雙面膠定做 2025-06-03
- 陜西小車剎車片更換 2025-06-03
- 宿州定制停車管理收費系統(tǒng)廠家電話 2025-06-03
- 常州呂鍛件鍛壓加工生產(chǎn)廠家 2025-06-03
- 寧波汽車配件批發(fā) 2025-06-03
- 淄川區(qū)前大燈翻新 2025-06-03
- 鄒平LED大燈 2025-06-03
- 云南剎車線訂制價格 2025-06-03