浙江超大型四向穿梭機器人貨架
四向穿梭車操作方法:四向穿梭車貨架操作方法應(yīng)與用戶提供給規(guī)劃者的設(shè)計資料一致,。除非另有規(guī)定,,否則四向穿梭車貨架供應(yīng)商在設(shè)計時應(yīng)假定四向穿梭車貨架滿足設(shè)計操作凈距和使用檢測與維護的要求,。應(yīng)明確搬運貨物的方法,以確定在放置操作過程中施加在四向穿梭車貨架上的荷載,。良好的機械搬運設(shè)備操作不會誤操作或沖擊四向穿梭車貨架,。如果叉車沒有以可控的方式放置托盤,那么就會對四向穿梭車貨架造成較大的荷載,,例如:a)把托盤向后推,,與四向穿梭車貨架接觸著滑到位,從而產(chǎn)生一個很大的水平摩擦力;b)把安全背擋桿當(dāng)作緩沖背擋桿使用,;c)叉車桅桿變形過大時,。智世智能四向穿梭車能夠1小時內(nèi)完成新車部署,有效降低實施成本,。浙江超大型四向穿梭機器人貨架
四向穿梭車
四向穿梭車的使用操作守則怎么做,?1、行李配置遵循從上到下的輕便法則:架子頭重容易發(fā)生事故,,一旦發(fā)生事故,,后果不堪設(shè)想。所以,,裝行李的時候一定要把輕的貨物放在架子上面,,重的放在架子底部以穩(wěn)定架子底部,避免事故發(fā)生,。2,、貨物配置要避免超重的規(guī)則:裝載時注意不要超重,否則架子容易變形和折斷,,對架子下的貨物和人有危險性,,所以也不能存在超重的問題,使用和裝載行李的時候也要注意防止撞到架子上,。同時無需頻繁更換液壓油等保養(yǎng)作業(yè),,有效降低了維護成本,兼容兩向穿梭板貨架,,很大程度上降低了立庫的升級成本。重慶四向穿梭機器人廠家推薦智世智能四向穿梭車能夠自動除塵,,可適應(yīng)復(fù)雜環(huán)境,。

四向穿梭車出庫方式介紹:1、跟入庫一樣,,四向穿梭車待命,;2、確定四向穿梭車的取貨地點后,,WCS系統(tǒng)根據(jù)四向穿梭車的當(dāng)前位置和目的地位置,,將取貨任務(wù)發(fā)送給四向穿梭車;3,、根據(jù)收到的任務(wù)指令,,四向穿梭車開始取貨;4,、在交叉軌道上,,四向穿梭車通過實際距離以位移模式運行,在運行過程中不斷掃描穿過車體下部的軌道,。每通過一個路口位置,,通過掃描軌跡判斷檢查運行距離,,接近目的地時,通過側(cè)向激光傳感器微調(diào)停車位置,,實現(xiàn)準(zhǔn)確定位控制和停車,;5、在子通道,,四向穿梭穿梭車掃描十字軌道和側(cè)面對中鏡的反光貼,,通過掃描這些點來判斷行駛距離,從而實現(xiàn)在子通道的精確定位控制,,到達目的地,。
智世四向穿梭車系統(tǒng)安全性、穩(wěn)定性更高,。例如,,傳統(tǒng)多層穿梭車系統(tǒng)中提升機發(fā)生故障,整個巷道作業(yè)都會被影響,;而智世四向穿梭車系統(tǒng)則可以通過其他提升機來繼續(xù)完成作業(yè),,使系統(tǒng)能力幾乎不受到任何影響。在系統(tǒng)整體成本方面,,智世四向穿梭車系統(tǒng)也很有優(yōu)勢,。由于普通多層穿梭車或堆垛機系統(tǒng)成本與巷道數(shù)量息息相關(guān),在增加訂單量,、不增加庫存量情況下,,這些系統(tǒng)每增加一個巷道,就會增加相應(yīng)成本,,而智世四向穿梭車系統(tǒng)只需增加穿梭車數(shù)量即可,,總體成本更低。智世四向穿梭車系統(tǒng)既適合低流量,、高密度的存儲,,也適合高流量、高密度存儲揀選,。定期檢查四向穿梭車的外觀,、傳感器、行走輪,、指示燈等情況是否良好,。
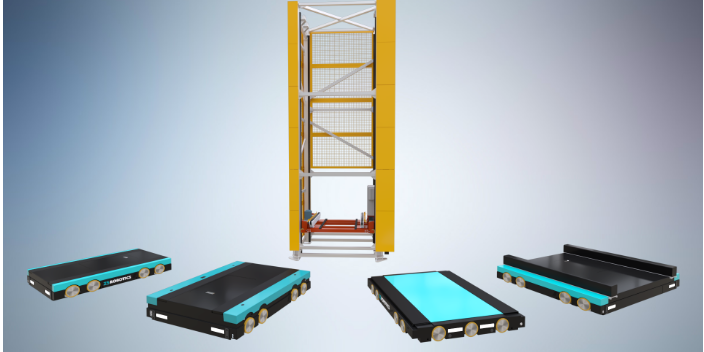
四向穿梭車是一種自動化搬運貨物的設(shè)備,它與無線遙控相連接,,結(jié)合RFID,、條形碼等識別技術(shù),輕松實現(xiàn)貨架貨物的自動識別和存取。四向穿梭車存貨的原理是將四向穿梭車放置在托盤下的運行的貨架軌道上,。在遙控指令或者wms系統(tǒng)的引導(dǎo)下,,將穿梭車的升降平臺面朝上,將托盤單元抬起運行到目的地,,然后將托盤上的貨物存放到貨位上,。四向穿梭車的存貨原理是通過叉車或堆垛機將托盤單元貨物放置在四向穿梭車貨架的巷道導(dǎo)軌前方。然后倉庫工人用無線電遙控操作四向穿梭車攜帶托盤單元在貨架導(dǎo)軌上運行,,運輸?shù)较鄬?yīng)的貨位上,。四向穿梭車可以通過叉車或堆垛機放置在不同的貨架軌道上,一輛四向穿梭車可以用于多條貨架巷道,。四向穿梭車的數(shù)量由貨架的巷道深度,、總貨運量和出入庫頻率等綜合因素決定。智能四向穿梭車對電池也要進行例行檢查,。上海冷鏈四向穿梭車廠家
智能四向穿梭車是智世自主研發(fā)的倉儲搬運設(shè)備,。浙江超大型四向穿梭機器人貨架
四向穿梭車入庫方式介紹:1、技術(shù)人員先啟動四向穿梭車,,使四向穿梭車處于待命狀態(tài),。2、確定取貨地點后,,根據(jù)四向穿梭車的當(dāng)前位置和目的地位置,,WCS會規(guī)劃行車路線,然后工作人員通過WCS系統(tǒng)向四向穿梭車下達配送貨物指令,。3,、根據(jù)收到的任務(wù)指令,四向穿梭車開始執(zhí)行配送任務(wù),。4,、在交叉軌道上,四向穿梭車通過實際距離以位移方式行駛,,行駛過程中不斷掃描車體下部經(jīng)過的軌道,每通過一個道口位置就通過掃描軌道來判斷和校對行駛距離,,接近目的地時通過側(cè)向激光傳感器微調(diào)停車位置,,實現(xiàn)停車位置的精確定位。5,、在子通道,,四向穿梭車掃描十字軌道和側(cè)面對中鏡的反光貼,通過掃描點判斷校對行駛距離,,在子通道實現(xiàn)準(zhǔn)確定位控制到達目的地,。浙江超大型四向穿梭機器人貨架
- 高效率四向穿梭車采購 2025-06-07
- 廣西高效率立體庫 2025-06-07
- 江蘇高密度立體庫售后 2025-06-07
- 江蘇倉儲式立體庫采購 2025-06-07
- 浙江港口立體庫貨架 2025-06-07
- 北京立體庫廠家 2025-06-07
- 航空行業(yè)高架庫采購價 2025-06-07
- 江蘇電子行業(yè)高架庫售后 2025-06-07
- 航空行業(yè)高架庫報價 2025-06-07
- 浙江超薄型四向穿梭機器人怎么賣 2025-06-07
- 北京保溫砂漿設(shè)備 2025-06-07
- 四川不銹鋼節(jié)能罐品牌推薦 2025-06-07
- 新吳區(qū)購買碳鋼反應(yīng)釜 2025-06-07
- 四川片材機一般多少錢 2025-06-07
- 快速換色閥哪個供應(yīng)商質(zhì)量好 2025-06-07
- 河北齒輪箱生產(chǎn)商 2025-06-07
- 貴州水冷式冷水機選型 2025-06-07
- SMT貼裝歡迎選購 2025-06-07
- 福州潤滑泵費用 2025-06-07
- 武漢水冷式工業(yè)風(fēng)扇哪家靠譜 2025-06-07