-
 多功能機械手實訓裝置
多功能機械手實訓裝置機械類機械制圖,、AUTOCAD,、機械設(shè)計,、機械制造,。電氣類電工技術(shù),、電子技術(shù)、單片機技術(shù)與應用,、PLC工業(yè)控制,、自動化生產(chǎn)線裝調(diào)與維修、傳感器與檢測技術(shù),、電機拖動與自動化控制系統(tǒng),、液壓與氣壓傳動。機器人類工業(yè)機器人技術(shù)基礎(chǔ),、工業(yè)機器人操作與編程,、工業(yè)機械手應用、工業(yè)機器人系統(tǒng)應用與維護,、工控組態(tài)與現(xiàn)場總線技術(shù),、工業(yè)機器人應用系統(tǒng)的三維建模、工業(yè)機器人工作站的系統(tǒng)集成,、工業(yè)機器人智能視覺系統(tǒng)應用,。實踐與創(chuàng)新類機器人創(chuàng)新設(shè)計、工業(yè)機器人應用方案設(shè)計,、測繪實訓,、鉗工實訓,、焊接實訓,、數(shù)控編程實訓、輪崗實訓,、機器人應用實訓,、崗前綜合訓練、頂崗實習,、畢業(yè)設(shè)計,。4職業(yè)面向據(jù)統(tǒng)計,安裝,、調(diào)試,、維護與保養(yǎng)工程師...
2025-02-27 -
 原裝進口機械手實訓裝置用途
原裝進口機械手實訓裝置用途主要實訓內(nèi)容:機器人認知、機器人手動操縱,、查看機器人信息,、機器人數(shù)據(jù)的備份與恢復、機器人I/O通信,、機器人的硬件連接,、PLC控制、氣源裝置及氣缸、電磁閥控制,、機械手手動控制,、上料模塊的裝調(diào)與操控、裝配模塊的裝調(diào)與操控,、機器檢測模塊的裝調(diào)與操控,、噴涂模塊的裝調(diào)與操控,、光電傳感器檢測及調(diào)整、碼垛模塊的裝調(diào)與操控,、機器人軌跡運動模塊裝調(diào),。(2).此基礎(chǔ)平臺主要完成以下工作:來料、輸送,、碼垛,、分揀、裝配等,,并搭載了TCP校點模塊,、焊接(涂膠)軌跡模擬模塊。(3).此基礎(chǔ)工作站以三種工件裝配為一款產(chǎn)品為前提,,通過來料來料儲存單元在芯片組裝機構(gòu)實現(xiàn)物料組裝,,然后通過輸送裝置輸出到后續(xù)工序。這機械手實訓裝置...
2025-02-26 -
 漢吉龍機械手實訓裝置
漢吉龍機械手實訓裝置訓練對機器人基本的點示教,,直線,、曲線運動足跡的機器人運動路線選擇優(yōu)化;2.學習點的定位及機器人運動路線選擇優(yōu)化,。零件排列單元功能簡介:滿足平面,、斜面、陣列,、指定編號位置,、多種物料混合等要求;強化對機器人點位移訓練與理解,。該模塊主要用于工業(yè)機器人在不同位置的自動排列、搬運及規(guī)劃示教編程實訓,,該模塊采用鋁合金加工制造,,表面陽極氧化處理。1.訓練對機器人基本的點示教,直線,、曲線運動足跡的機器人運動路線選擇優(yōu)化,;2.機器人通過吸盤夾具依次把一個物料板擺放好的物料拾取搬運到另一個物料板上;3.搬運形式可根據(jù)要求靈活組合,,形式多樣,,能滿足平面、斜面,、陣列,、指定編號位置、多種物料混合等要求,;機械手實訓裝置質(zhì)...
2025-02-23 -
 進口機械手實訓裝置產(chǎn)線
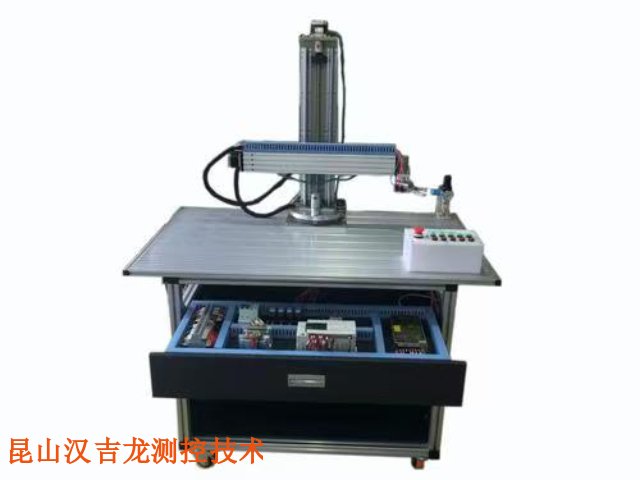
進口機械手實訓裝置產(chǎn)線,、機械手實驗裝置由底座、旋轉(zhuǎn)底座,、氣動部分,、三維(X、Y,、Z)運動機械及電氣控制等四部分組成,。氣動部分由電磁閥和氣缸組成。三維運動機械部分是一個采用滾珠絲杠傳動的齒輪傳動相結(jié)合的模塊化結(jié)構(gòu),,用于實現(xiàn)定位功能,。2、電氣控制由三菱可編程控制器(PLC自備),,步進電機驅(qū)動器,、電源、傳感器等組成,。3,、通過傳感器信號采集,PLC編程,,實現(xiàn)對步進電機,、直流電機、電磁閥進行較復雜的位置控制,、時序邏輯控制及開關(guān)控制等功能,。4、能完成PLC主機網(wǎng)絡及MCGS工控組態(tài)棒圖動態(tài)跟蹤實驗教學,。二,、通過編程,可實現(xiàn)如下實驗功能開機復位,、橫軸前伸/縮回,、豎軸上升/下降,、底盤旋轉(zhuǎn)、手旋轉(zhuǎn),、手張開/夾緊,,通過編程,使上述功能...
2025-02-22 -
 自動化機械手實訓裝置企業(yè)
自動化機械手實訓裝置企業(yè)HOJOLO機械手實訓裝置由鋁合金導軌式實訓臺,、機械手裝置,、控制系統(tǒng)等組成。該實訓裝置為坐標式機械手,,可完成機械手旋轉(zhuǎn),、手臂垂直上下、手臂水平移動,,手爪旋轉(zhuǎn)四個自由度的位置精確控制,。同時配置晶體管式PLC可編程控制器,用于對整個機械手進行復雜地位置控制,。該實訓裝置的控制部分均采用標準式模塊設(shè)計,,可分為電源模塊、PLC模塊,、系統(tǒng)控制模塊,。包含了機電一體化專業(yè)中所涉及的諸如步進電機驅(qū)動、機械傳動,、氣動,、可編程控制器、傳感器,、等多項技術(shù),,給學生提供了一個綜合實訓環(huán)境,使學生學過的諸多單科專業(yè)知識在這里得到***認識,、綜合訓練和相互提升,。該實訓裝置主要用于電氣、電工電子,、自動化控制,、機電一體化專業(yè)崗位...
-
 智能制造機械手實訓裝置
智能制造機械手實訓裝置機械裝調(diào)技術(shù)綜合實訓臺是我公司根據(jù)國家職業(yè)標準及行業(yè)標準,依照各大專院校的教學要求和內(nèi)容,,如技工院校,、職業(yè)院校的“數(shù)控技術(shù)及應用”、“機械制造技術(shù)”,、“機電設(shè)備安裝與維修”,、“機械裝配”、“機械設(shè)備裝配與自動控制”等專業(yè)的培養(yǎng)目標而研發(fā)的比較好實訓裝置,。主要培養(yǎng)學生對整套機械裝置的設(shè)計與搭接方法,,使學生從機械識圖,、繪圖,、包括裝配圖,、部件圖、組件圖,、零件圖等有一個較***的認識,,同時對鉗工的基本操作、零部件與機構(gòu)的裝配工藝要求及調(diào)整,、裝配質(zhì)量的檢驗有一個完整的學習過程,;提高學生在機械制造企業(yè)及相關(guān)行業(yè)**工藝裝配與實施、機電設(shè)備安裝調(diào)試與維護修理,、機械加工質(zhì)量分析與控制,、基層生產(chǎn)管理等崗位的就業(yè)...
2025-02-20 -
 維護機械手實訓裝置保修
維護機械手實訓裝置保修實訓臺上料實訓單元搬運實訓單元分揀實訓單元倉儲實訓單元人機界面實訓單元警示器實訓單元PLC實訓模塊單片機實訓模塊變頻器實訓模塊步進電機實訓模塊電機實訓模塊計算機內(nèi)嵌式設(shè)計SIMIC或亞德客SICC或亞德客SIC或亞德客SIC或亞德客、三菱三菱GT1155256名24VDCFX2ц-48MT+FXОH-3A偉福SH-51系統(tǒng)三菱FR-E700-0.4k多細分度可調(diào)2A輸出三相減速電機,,實驗項目:送料單元1,、氣動組件的應用與裝調(diào)2、霍爾磁性開關(guān)的裝調(diào)3,、對射型傳感器的應用4,、匯流板式電磁閥的控制應用5、重力填充式機構(gòu)的安裝與調(diào)試6,、反射型傳感器定位應用在機械手實訓裝置上能熟練掌握多軸聯(lián)動操控嗎,?維...
2025-02-18 -
 教學機械手實訓裝置實驗
教學機械手實訓裝置實驗機器人實訓平臺包含六自由度工業(yè)機器人、傳感器檢測系統(tǒng),、PLC控制系統(tǒng)及一套供料,、輸送、壓鑄,、焊接機構(gòu),,可以實現(xiàn)對傳輸?shù)墓ぜM行碼垛、檢測,、搬運,、焊接模擬、壓鑄模擬等操作,。VALENIAN-ABB機器人實訓平臺各組件均安裝在型材桌面上,,機械結(jié)構(gòu)、電氣控制回路,、執(zhí)行機構(gòu)相對**,,采用工業(yè)標準件設(shè)計。通過機器人實訓平臺可以進行機械組裝,、電氣線路設(shè)計與接線,、PLC編程與調(diào)試,、機器人編程等多方面訓練,適合職業(yè)院校,、技工學校自動化類相關(guān)專業(yè)《工業(yè)機器人與控制技術(shù)》,、《自動化技術(shù)》等課程的實訓教學,適合自動化技術(shù)人員進行工程訓練及技能比賽,。機械手實訓裝置可以用于科研嗎,?教學機械手實訓裝置實驗機械手實訓裝置通...
2025-02-18 -
送料設(shè)備機械手實訓裝置圖片
裝置構(gòu)成該裝置主要由鋁合金安裝實訓平臺、生產(chǎn)供料單元,、運輸單元及倉庫單元等組成,。學員可根據(jù)學習需求,自由選擇部件和安裝位置,,構(gòu)建個性化的實訓環(huán)境,。這種開放式的結(jié)構(gòu),極大地增強了裝置的靈活性和實用性,。五,、技術(shù)創(chuàng)新與特點機電一體化綜合實訓裝置實現(xiàn)了多種控制方式的融合,使同一種負載模型可以通過不同的驅(qū)動方式進行控制,。這種設(shè)計不僅鍛煉了學員的實操能力,,還激發(fā)了他們的創(chuàng)新思維。裝置還集成了傳感器技術(shù),、通訊及監(jiān)控技術(shù)等多項先進技術(shù),,為學員提供了一個***的機電一體化技術(shù)學習環(huán)境。機械手實訓裝置有培訓老師嗎,?送料設(shè)備機械手實訓裝置圖片配套鋁鋼式機械手臺架,,豎軸及橫軸采用經(jīng)氧化處理的鋁型材,而臺架的側(cè)面及底面...
2025-02-15 -
多功能機械手實訓裝置怎么做
工業(yè)機器人作為先進制造業(yè)中不可替代的重要裝備和手段,,已成為衡量一個國家制造業(yè)水平和科技水平的重要標志,。我國正處于加快轉(zhuǎn)型升級的重要時期,以工業(yè)機器人為主體的機器人產(chǎn)業(yè),,正是**我國產(chǎn)業(yè)成本上升,、環(huán)境制約問題的重要路徑選擇。自動裝配機器人工作站數(shù)字化測量機器人工作站心動不如行動想玩轉(zhuǎn)機器人襄職助你實現(xiàn)夢想走進智能制造的殿堂成為人人羨慕的機器人工程師,,面向工業(yè)機器人生產(chǎn),、應用和系統(tǒng)集成企業(yè),培養(yǎng)從事工業(yè)機器人示教編程,、工作站安裝調(diào)試,、工作站維護維修、系統(tǒng)集成,、售后服務等崗位工作,,達到機器人示教工程師,、自動化設(shè)備調(diào)試工程師的知識、能力和職業(yè)素養(yǎng),,具有創(chuàng)新精神和實踐能力的高素質(zhì)技術(shù)技能型人才,。怎樣才能...
2025-02-14 -
預測性機械手實訓裝置廠家排名
搬運里元1、氣動組件的應用與裝調(diào)2,、霍爾磁性開關(guān)的裝調(diào)3,、三軸運動機械手控制4、機械手單周期運動控制5,、機械手連續(xù)運動控制6、機械手步進運動控制7,、機械手手動/自動控制8,、機械手錄制控制分揀單元1、氣動組件的應用與裝調(diào)2,、變頻器基本參數(shù)設(shè)置實訓3,、變頻器PU操作實訓變頻器外部控制實訓4.5、變頻器點動調(diào)試實訓6,、變頻器無極調(diào)速實訓7,、變頻器多段速度控制實訓8、變頻器自定義端子實訓9,、反射性傳感器的應用10,、材質(zhì)傳感器的應用11、霍爾傳感器的應用12,、電機控制傳送帶運行實訓13,、步進系統(tǒng)控制傳送帶運行實訓14、分類記錄管理學習使用機械手裝置實訓的收獲真大??!預測性機械手實訓裝置廠家排名教學的協(xié)作...
2025-02-13 -
 上料機械手實訓裝置服務
上料機械手實訓裝置服務以可編程序控制器為**的工業(yè)控制集成技術(shù),目前在高等院校已經(jīng)迅速發(fā)展成為一門新的學科,,其內(nèi)容既有豐富的理論,,又有***的實踐,既能鍛煉學生的動手能力,,又能培養(yǎng)學生的創(chuàng)新思想,,已經(jīng)形成自動化專業(yè)、機電一體化專業(yè),、機械專業(yè)的一門重要的主干課程,。關(guān)于可編程序控制器的課程設(shè)置、配套教材,、實踐環(huán)節(jié),、實驗室建設(shè)等方面的規(guī)劃,,得到了各級領(lǐng)導和專業(yè)教師的充分重視。 我公司的“VALENIAN 機械手實訓裝置”是為職業(yè)技術(shù)教育,、高等教育而開發(fā)的PLC專業(yè)性控制實訓平臺,,專為目前我國各院校開設(shè)的“可編程序邏輯控制器技術(shù)”、“可編程序邏輯控制器原理及其應用”,、“維修電工”,、 “PLC應用技術(shù)”、“PLC...
2025-02-13 -
 瓦倫尼安機械手實訓裝置企業(yè)
瓦倫尼安機械手實訓裝置企業(yè)配套夾具抓手吸盤夾具,、軌跡規(guī)劃夾具,、裝配夾具等電氣控制系統(tǒng)開放式電氣布局;2.配套主流PLC,、數(shù)字量14點輸入10點輸出,、模擬量2點輸入、工作存儲器≥50KB,。1.外形尺寸:110x100x81mm,;2.重量:435g3.儲存器大小:18KB程序存儲器,,12KB數(shù)據(jù)存儲器4.保持時間:120VAC,,30ms5.漏地電流;0.5mA6.浪涌電流:269VAC時,8.9A人機交互終端采用行業(yè)內(nèi)比較高速800MHzCPU,,快速的數(shù)據(jù)處理和傳送能力,,為高效工作提供保障65536色彩顯示以及800*480的高分辨率,畫面更加細膩逼真,。1.顯示尺寸:7”TFT觸摸屏2.分辨率:800*480像素3.顯示色...
2025-02-12 -
 高校機械手實訓裝置定制
高校機械手實訓裝置定制教學的協(xié)作機器人上下料相較于人工上下料更高效,,比傳統(tǒng)固定式上料設(shè)備更靈活,部署時間更短,。通過即插即用的末端組件和簡單編程,,用戶可快速集成各種零部件上下料方案,同一時間段內(nèi)可滿足流水線上多工位上料任務,,快速切換生產(chǎn)品種,,高效滿足大批量或小批量定制柔性生產(chǎn)的需求。漢吉龍協(xié)作機器人重復定位精度高達 ±0.02 mm,,在精密加工中可確保多臺機器人同時操作的一致性,,實現(xiàn)產(chǎn)品的標準化生產(chǎn),提升生產(chǎn)品質(zhì),,良品率達到 99% 以上,。比較大 4 m/s 的節(jié)拍速度,可高效輸送零件,在機床上下料中,,提升生產(chǎn)效率 20% — 40%,。機械手實訓裝置能讓學員迅速掌握操作技巧嗎?高校機械手實訓裝置定制機電一體化綜合...
2025-02-11 -
 上海機械手實訓裝置使用方法
上海機械手實訓裝置使用方法強化對機器人點位移訓練與理解,。自動裝配單元功能簡介:用于工業(yè)機器人裝配應用實訓,含自動夾具,。1.以一個固定的裝配平臺為基板,用于工業(yè)機器人裝配應用實訓,含自動夾具,;2.機器人通過抓手或吸盤拾取傳輸帶傳送過來的“裝配元件1”擺放至裝配平臺,,機器人呼叫夾緊氣缸夾緊固定;3.機器人通過抓手或吸盤拾取傳輸帶傳送過來的“裝配元件2”裝配至“裝配元件1”上,;4.機器人呼叫夾緊氣缸,,松開;5.機器人將裝配完成的“組裝件”搬運至“立體倉庫”內(nèi),;6.訓練對機器人精確定位及抓手吸盤夾具的學習,。立體倉儲單元1.用于機器人物料的自動存儲;2.工業(yè)鋁型材結(jié)構(gòu),,雙層結(jié)構(gòu),用于裝配成品件的安放于擺置,;訓練工業(yè)機器人的精確定...
2025-02-11 -
定制機械手實訓裝置調(diào)試
工業(yè)機器人具有6個自由度,,串聯(lián)關(guān)節(jié)型工業(yè)機器人,大的工作半徑為580mm,,有效負載3kg,,重復定位精度±0.01mm,機器人本體重量25kg,,第1軸工作范圍為-165~+165°,,Z大旋轉(zhuǎn)速度330°/s,第2軸工作范圍為+110°/-110°,,Z大旋轉(zhuǎn)速度220°/s,,第3軸工作范圍為-90~+70°,Z大旋轉(zhuǎn)速度160°/s,,第4軸工作范圍為-160~+160°,,Z大旋轉(zhuǎn)速度320°/s,第5軸工作范圍為-120~+120°,,Z大旋轉(zhuǎn)速度240°/s,,第6軸工作范圍為-400~+400°,Z大旋轉(zhuǎn)速度800°/s,。工業(yè)機器人示教器及驅(qū)控一體機,。3操作面板模塊操作面板上的元件:操作面板上的元...
2025-02-10 -
實物機械手實訓裝置電話
機械類機械制圖、AUTOCAD、機械設(shè)計,、機械制造,。電氣類電工技術(shù)、電子技術(shù),、單片機技術(shù)與應用,、PLC工業(yè)控制、自動化生產(chǎn)線裝調(diào)與維修,、傳感器與檢測技術(shù),、電機拖動與自動化控制系統(tǒng)、液壓與氣壓傳動,。機器人類工業(yè)機器人技術(shù)基礎(chǔ),、工業(yè)機器人操作與編程、工業(yè)機械手應用,、工業(yè)機器人系統(tǒng)應用與維護,、工控組態(tài)與現(xiàn)場總線技術(shù)、工業(yè)機器人應用系統(tǒng)的三維建模,、工業(yè)機器人工作站的系統(tǒng)集成,、工業(yè)機器人智能視覺系統(tǒng)應用。實踐與創(chuàng)新類機器人創(chuàng)新設(shè)計,、工業(yè)機器人應用方案設(shè)計,、測繪實訓、鉗工實訓,、焊接實訓,、數(shù)控編程實訓、輪崗實訓,、機器人應用實訓、崗前綜合訓練,、頂崗實習,、畢業(yè)設(shè)計。4職業(yè)面向據(jù)統(tǒng)計,,安裝,、調(diào)試、維護與保養(yǎng)工程師...
2025-02-07 -
智能制造機械手實訓裝置廠家
實訓臺上料實訓單元搬運實訓單元分揀實訓單元倉儲實訓單元人機界面實訓單元警示器實訓單元PLC實訓模塊單片機實訓模塊變頻器實訓模塊步進電機實訓模塊電機實訓模塊計算機內(nèi)嵌式設(shè)計SIMIC或亞德客SICC或亞德客SIC或亞德客SIC或亞德客,、三菱三菱GT1155256名24VDCFX2ц-48MT+FXОH-3A偉福SH-51系統(tǒng)三菱FR-E700-0.4k多細分度可調(diào)2A輸出三相減速電機,,實驗項目:送料單元1、氣動組件的應用與裝調(diào)2,、霍爾磁性開關(guān)的裝調(diào)3,、對射型傳感器的應用4,、匯流板式電磁閥的控制應用5、重力填充式機構(gòu)的安裝與調(diào)試6,、反射型傳感器定位應用機械手實訓裝置有培訓老師嗎,?智能制造機械手實訓...
-
 維護機械手實訓裝置怎么用
維護機械手實訓裝置怎么用根據(jù)項目教學要求,,該裝置主要完成以下實訓任務:設(shè)備安裝與調(diào)整,、液壓傳動系統(tǒng)識圖與管路安裝等,。通過這些實訓任務,,學生可以掌握機電液氣一體化系統(tǒng)的基本原理和操作技能,提高解決實際問題的能力,。同時,,裝置的高度靈活性和可定制性,,也為學生提供了更廣闊的學習和發(fā)展空間,。具體實訓項目如下:1.供料單元的安裝與調(diào)試的實訓;2.加工單元的安裝與調(diào)試的實訓;3.鉆孔單元的安裝與調(diào)試的實訓:4.分揀單元的安裝與調(diào)試的實訓;5.滑動單元的安裝與調(diào)試的實訓:6.自動生產(chǎn)線控制的安裝與調(diào)試的實訓;7.氣動方向控制回路的安裝:8.氣動速度控制回路的安裝:9.氣動,順序控制回路的安裝:10.氣動系統(tǒng)安裝與調(diào)試:11.氣動綜合...
2025-02-05 -
 貴州機械手實訓裝置
貴州機械手實訓裝置數(shù)控車床 實訓設(shè)備 實訓裝置 實驗設(shè)備 教學設(shè)備 教學儀器 實驗平臺 實訓臺 考核裝置 實訓系統(tǒng) 實驗裝置 數(shù)控技術(shù) 實訓考核 技能實訓 數(shù)控系統(tǒng) 電氣控制 實訓鑒定 實驗系統(tǒng) 數(shù)控軟件 數(shù)控實訓 電氣技術(shù) 實訓目錄 數(shù)控銑床 高教設(shè)備 職教設(shè)備 實訓車床 PLC控制 PLC技術(shù) PLC實驗 PLC實訓,。智能物流倉儲自動化實訓平臺是對生產(chǎn)物流活動進行計劃、組織,、指揮,、協(xié)調(diào)、控制和監(jiān)督,,使各項物流活動實現(xiàn)比較好協(xié)調(diào)與配合。以工業(yè)工程知識點為對象,,與信息流,、物流、資金流有機結(jié)合,,貫穿了現(xiàn)代管理技術(shù),、自動化技術(shù)、系統(tǒng)工程技術(shù)及現(xiàn)代信息技術(shù),。緊密結(jié)合生產(chǎn)實際和職業(yè)崗位的技能要求,,按照職業(yè)教育的教學和實...
2025-01-27 -
 江蘇機械手實訓裝置裝置
江蘇機械手實訓裝置裝置裝載機液壓系統(tǒng)與PLC控制實訓裝置一、概述裝載機是機械工程中主要的機械,,它廣泛應用于工程建筑、施工筑路,、水力工程,、**工程等土石方施工及礦山采掘等行業(yè),。液壓裝載機仿真模型具有體積小、重量輕,、操作方便和遠距離操縱等優(yōu)點,,其目的是引導學生進行積極思維、創(chuàng)新設(shè)計,、培養(yǎng)學生綜合設(shè)計能力和實踐動手能力,,裝載機是機械工程中主要的機械,它廣泛應用于工程建筑,、施工筑路,、水力工程、**工程等土石方施工及礦山采掘等行業(yè),。液壓裝載機仿真模型具有體積小,、重量輕、操作方便和遠距離撰縱等優(yōu)點,,其目的是引導學生進行積極思維,、創(chuàng)新設(shè)計、培養(yǎng)學生綜合設(shè)計能力和實踐動手能力一種新型綜合實訓設(shè)備,。該機械手實訓裝置有提高學員的實踐動...
2025-01-26 -
 上海機械手實訓裝置保修
上海機械手實訓裝置保修工作站結(jié)構(gòu)認知 關(guān)鍵設(shè)備的特性和參數(shù)設(shè)置 工業(yè)機器人及周邊設(shè)備的維護及典型錯誤排查 工業(yè)機器人手動控制及基本參數(shù)設(shè)置 工業(yè)機器人IO通信及PLC信息交互 工業(yè)機器人單軸運動與線性運動控制 工業(yè)機器人工具TCP參數(shù)標定 工業(yè)機器人工件坐標系參數(shù)標定及多坐標系切換 基于關(guān)鍵點的軌跡編程(精確定位/圓弧逼近) 基于樣條曲線的軌跡編程 條件判斷語句的用法及編程 循環(huán)語句的用法及編程 子程序的編程及調(diào)用 模擬碼垛工藝應用編程 模擬上下料工藝應用編程 工業(yè)機器人與PLC的通訊與聯(lián)調(diào) 基于Prt工業(yè)機器人離線編程軟件的工作站模型環(huán)境搭建與配置 基于Prt工業(yè)機器人離線編程軟件的簡單平面軌跡離線編程應用 基于...
2025-01-25 -
 漢吉龍機械手實訓裝置裝置
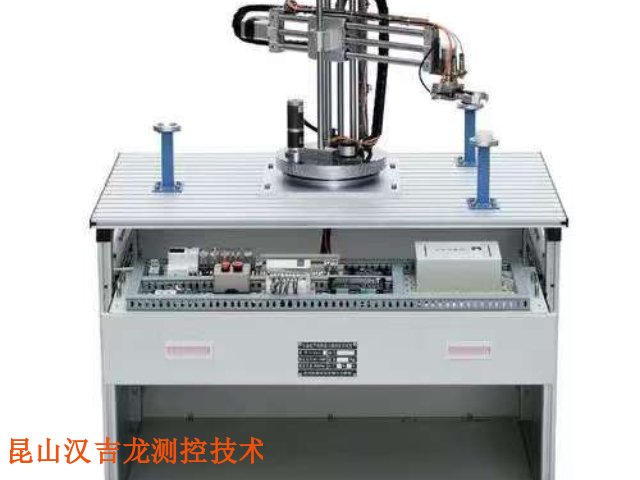
漢吉龍機械手實訓裝置裝置該裝置集PLC,、位置控制、氣動技術(shù)有機結(jié)合于一體的實訓系統(tǒng),,通過傳感器信號采集,、PLC編程,對步進電機,、直流電機,、電磁閥進行較復雜的開關(guān)量控制、位置控制,、時序邏輯控制,,實現(xiàn)對機械手在工作臺面范圍內(nèi)物體抓取、移,、放的功能,。該裝置適用于中高級職業(yè)院校、高等院校學生的可編程控制器的學習與應用培訓,、學生的崗前培訓和職工再培訓,,不僅可滿足各高等院校、職業(yè)學校對PLC實驗教學和相關(guān)課程設(shè)計,、考核的要求,,還可作為工程技術(shù)人員的培訓設(shè)備。這機械手實訓裝置能滿足多種實訓需求嗎,?漢吉龍機械手實訓裝置裝置1.VALENIAN可編程控制器高級指令編程實訓:通過實際操作,,使學生深入掌握PLC高級指令的編程技巧,,提升自動...
2025-01-25