廣州在線式跟隨視覺點(diǎn)膠系統(tǒng)費(fèi)用
目前,,點(diǎn)膠機(jī)市場(chǎng)競(jìng)爭(zhēng)日益劇烈,,唯有好品質(zhì)質(zhì)量和成熟穩(wěn)定的點(diǎn)膠工藝技術(shù)才能占領(lǐng)市場(chǎng)。而當(dāng)前,,電子行業(yè)屬于朝陽行業(yè),,發(fā)展的前景非常好,電子行業(yè)中的很多零件都需要用到點(diǎn)膠機(jī)技術(shù),。點(diǎn)膠機(jī)設(shè)備要想在電子行業(yè)占一席之地,,就必須要提高電子行業(yè)點(diǎn)膠質(zhì)量,這就意味要有著高精度高速度的點(diǎn)膠技術(shù),。電子行業(yè)對(duì)點(diǎn)膠精度需求較高,,大多數(shù)電子產(chǎn)品結(jié)構(gòu)小巧,需要有高精度的點(diǎn)膠機(jī)設(shè)備才能完整地將膠水填充在電子產(chǎn)品中,。另外,,點(diǎn)膠機(jī)設(shè)備系統(tǒng)要做到精密的運(yùn)動(dòng)控制,確保產(chǎn)品的出膠量得到精確掌控,,能有效提高點(diǎn)膠速度,,使產(chǎn)品的點(diǎn)膠質(zhì)量得到相應(yīng)提升,。為迎合工業(yè)自動(dòng)化生產(chǎn),如電子行業(yè)的需求,,該如何去提升點(diǎn)膠設(shè)備,?視覺運(yùn)動(dòng)控制系統(tǒng)是用于生產(chǎn)、裝配或包裝的有價(jià)值的機(jī)制,。機(jī)器視覺的引入能夠精確的定位拾取工件的位置和待放工件點(diǎn)膠的位置,,可以快速識(shí)別工件,自動(dòng)路徑生成,,實(shí)時(shí)動(dòng)態(tài)顯示加工軌跡,,以實(shí)現(xiàn)更高速,更高精度的點(diǎn)膠作業(yè),,保證產(chǎn)品點(diǎn)膠質(zhì)量,。支持多工件隨意擺放,自動(dòng)識(shí)別,,智能點(diǎn)膠,,有效提升工作效率。VMC0400是旗眾智能耗時(shí)多年開發(fā)的全功能大幅面視覺點(diǎn)膠控制系統(tǒng),,該控制系統(tǒng)是CAD繪圖+機(jī)器視覺+運(yùn)動(dòng)控制+數(shù)據(jù)庫管理在點(diǎn)膠行業(yè)里的完美結(jié)合,,示教更直觀。全景視覺系統(tǒng)無需夾具的特點(diǎn)使得視覺點(diǎn)膠系統(tǒng)更加靈活多變,。廣州在線式跟隨視覺點(diǎn)膠系統(tǒng)費(fèi)用

視覺點(diǎn)膠系統(tǒng)的成本因多種因素而異,,包括系統(tǒng)的規(guī)模、復(fù)雜度和功能,。這些系統(tǒng)通常由多個(gè)組成部分組成,,包括視覺傳感器、膠水噴頭,、控制器和軟件等。較簡(jiǎn)單的視覺點(diǎn)膠系統(tǒng)需要具有較低的成本,。例如,,一個(gè)基本的系統(tǒng)需要只包括一個(gè)簡(jiǎn)單的2D視覺傳感器、單一膠水噴頭和相應(yīng)的控制器,,需要在幾千到數(shù)萬美元的范圍內(nèi),。高級(jí)的視覺點(diǎn)膠系統(tǒng)具有更高的成本,因?yàn)樗鼈兺ǔ>哂懈鼜?fù)雜的功能和更精確的定位能力,。這些系統(tǒng)需要包括3D視覺傳感器,、多個(gè)噴頭、多軸運(yùn)動(dòng)控制以及更先進(jìn)的軟件算法等,。這樣的系統(tǒng)需要需要數(shù)十萬美元到數(shù)百萬美元不等的投資,??傮w而言,具體的視覺點(diǎn)膠系統(tǒng)成本取決于項(xiàng)目需求和要求的精確程度,。為了獲取準(zhǔn)確的成本估計(jì),,建議與供應(yīng)商或?qū)I(yè)廠商進(jìn)行咨詢,以便根據(jù)特定項(xiàng)目的要求獲得定制的報(bào)價(jià),。深圳雙Y視覺點(diǎn)膠系統(tǒng)解決方案視覺點(diǎn)膠系統(tǒng)在精密儀器制造中的高精度應(yīng)用提升了產(chǎn)品品質(zhì)和穩(wěn)定性,。
拐角堆膠降速、運(yùn)動(dòng)中變速等功能,,避免出膠不勻,,“大頭”及拉絲現(xiàn)象;3,、行業(yè)軟件,,精確控制膠量時(shí)間、涂膠速度,,點(diǎn)膠時(shí)間,,停膠時(shí)間等參數(shù);4,、可設(shè)置循環(huán)加工,,循環(huán)次數(shù)、循環(huán)間隔時(shí)間可設(shè)置,,設(shè)備不間斷工作,,節(jié)省中間上下料時(shí)間,提高生產(chǎn)效率,;5,、適用于一般的點(diǎn)膠機(jī),一套系統(tǒng)即可完成針對(duì)不規(guī)則產(chǎn)品(如圓形,、橢圓形,、線條、半圓,、弧形,、曲線等)的隨意點(diǎn)膠,滿足多種加工樣式,,不需要專門的圓形點(diǎn)膠機(jī)來完成,;6、不需要模具固定產(chǎn)品,,產(chǎn)品可任意方向擺放,,一次性整板定位模式,無需單個(gè)產(chǎn)品逐個(gè)識(shí)別,采用視覺自動(dòng)識(shí)別定位并生成加工軌跡,,快速完成圓形工件的點(diǎn)膠工作,,快速提高生產(chǎn)效率;7,、可導(dǎo)入和保存多個(gè)文件,,相同產(chǎn)品無需重新編程,一次設(shè)計(jì)無限次使用,,快速完成圓形點(diǎn)膠工作,。適用產(chǎn)品:喇叭、音膜,、蜂鳴器,、軸承、五金飾品,、微型電機(jī),、手表、音圈等,。
視覺點(diǎn)膠系統(tǒng)的可持續(xù)發(fā)展戰(zhàn)略是指在設(shè)計(jì),、開發(fā)和應(yīng)用視覺點(diǎn)膠系統(tǒng)時(shí),考慮到環(huán)境,、社會(huì)和經(jīng)濟(jì)方面的可持續(xù)性因素,,以實(shí)現(xiàn)長(zhǎng)期的環(huán)境保護(hù)、社會(huì)責(zé)任和經(jīng)濟(jì)效益的平衡,。下面是一些視覺點(diǎn)膠系統(tǒng)的可持續(xù)發(fā)展戰(zhàn)略的例子:資源效率:通過優(yōu)化設(shè)計(jì)和工藝流程,,減少材料和能源的使用,提高資源利用效率,。例如,,使用精確的視覺識(shí)別系統(tǒng)和控制算法,實(shí)現(xiàn)準(zhǔn)確點(diǎn)膠,,減少膠水的浪費(fèi),。環(huán)境友好:選擇環(huán)境友好型的材料和膠水,減少對(duì)環(huán)境的污染和危害,。同時(shí),,優(yōu)化點(diǎn)膠過程,控制排放物和廢水的產(chǎn)生,,減少對(duì)周圍環(huán)境的影響。循環(huán)經(jīng)濟(jì):設(shè)計(jì)可拆卸和可重復(fù)使用的點(diǎn)膠系統(tǒng)組件,,降低廢棄物的產(chǎn)生,。同時(shí),提倡膠水回收和再利用,實(shí)現(xiàn)資源的循環(huán)利用,。視覺點(diǎn)膠系統(tǒng)的出現(xiàn)為工業(yè)生產(chǎn)帶來了創(chuàng)新性的改變,,提升了生產(chǎn)線效率。

視覺點(diǎn)膠系統(tǒng)—自適應(yīng)功能:傳統(tǒng)的點(diǎn)膠過程中,,夾具定位是必不可少的一環(huán),。然而,有了我們的視覺點(diǎn)膠系統(tǒng),,您將告別繁瑣的夾具定位,,降低生產(chǎn)成本,提高工作效率,!我們的系統(tǒng)通過高分辨率的圖像識(shí)別和智能算法,,軟件能夠快速辨識(shí)產(chǎn)品的形狀和位置。在使用我們的軟件時(shí),,您只需將相機(jī)對(duì)準(zhǔn)產(chǎn)品,,軟件會(huì)自動(dòng)識(shí)別并捕捉產(chǎn)品的特征點(diǎn)和邊緣,從而實(shí)現(xiàn)精確的點(diǎn)膠定位,。這樣,,您無需額外投入夾具定位的成本,同時(shí)避免了夾具帶來的操作復(fù)雜性,。即使產(chǎn)品形狀和尺寸有所變化,,我們的軟件也能根據(jù)實(shí)際情況自動(dòng)調(diào)整點(diǎn)膠路徑,確保準(zhǔn)確的點(diǎn)膠結(jié)果,。 視覺點(diǎn)膠系統(tǒng)的高度自動(dòng)化設(shè)計(jì)降低了生產(chǎn)成本,,提高了利潤(rùn)空間。深圳雙Y視覺點(diǎn)膠系統(tǒng)解決方案
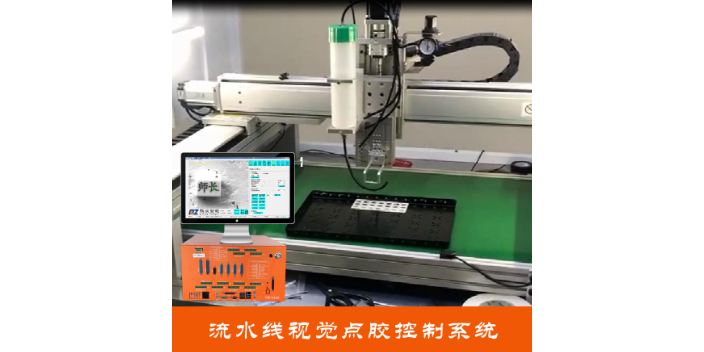
在電子設(shè)備組裝領(lǐng)域,,視覺點(diǎn)膠系統(tǒng)是提高生產(chǎn)質(zhì)量的關(guān)鍵工具,。廣州在線式跟隨視覺點(diǎn)膠系統(tǒng)費(fèi)用
視覺點(diǎn)膠系統(tǒng)中的圖像處理軟件主要通過以下步驟工作:圖像采集:首先,視覺點(diǎn)膠系統(tǒng)會(huì)使用相機(jī)或其他視覺傳感器采集工件表面的圖像,。這些圖像需要涉及到不同的光照條件和角度,。預(yù)處理:采集到的圖像需要會(huì)包含噪聲、光照不均勻等問題,,預(yù)處理步驟通常包括圖像去噪,、灰度變換、濾波以及增強(qiáng)對(duì)比度等操作,,以確保后續(xù)處理的準(zhǔn)確性,。特征提取:在圖像處理軟件中,,系統(tǒng)會(huì)識(shí)別工件上的特定特征或模式,,這些特征可以是線條,、邊緣、顏色,、形狀等,。特征提取通常包括邊緣檢測(cè)、輪廓提取,、顏色分類等算法,。匹配和定位:通過對(duì)提取的特征進(jìn)行匹配和比對(duì),圖像處理軟件可以確定工件的位置,、姿態(tài)或其他重要特征,。這一步通常涉及模板匹配、特征匹配,、圖像配準(zhǔn)等技術(shù),。廣州在線式跟隨視覺點(diǎn)膠系統(tǒng)費(fèi)用
- 東莞全景單工位視覺點(diǎn)膠系統(tǒng)配置 2025-06-04
- 廣州大視野視覺點(diǎn)膠系統(tǒng)公司電話 2025-06-04
- 中山標(biāo)準(zhǔn)視覺點(diǎn)膠系統(tǒng)方式 2025-06-04
- 中山多工位視覺點(diǎn)膠系統(tǒng)哪家靠譜 2025-06-04
- 佛山高精視覺點(diǎn)膠系統(tǒng)哪家靠譜 2025-06-04
- 東莞三軸視覺點(diǎn)膠系統(tǒng)服務(wù) 2025-06-04
- 佛山五軸聯(lián)動(dòng)視覺點(diǎn)膠系統(tǒng)制造商 2025-06-04
- 佛山多工位視覺點(diǎn)膠系統(tǒng) 2025-06-04
- 中山視覺點(diǎn)膠機(jī)系統(tǒng)費(fèi)用 2025-06-04
- 杭州3D視覺點(diǎn)膠系統(tǒng)公司電話 2025-06-04
- 溫嶺個(gè)性化填料解決方案 2025-06-07
- 上海減少人工的鋸切套絲生產(chǎn)線如何定制 2025-06-07
- 常州國(guó)產(chǎn)步進(jìn)電機(jī)驅(qū)動(dòng)器廠家電話 2025-06-07
- 臺(tái)州柱塞閥門維修廠家 2025-06-07
- 黃山重型起重機(jī)價(jià)格 2025-06-07
- 成都天花式防爆空調(diào) 2025-06-07
- 上海在線式打標(biāo)機(jī)廠家 2025-06-07
- 常州電梯價(jià)格表 2025-06-07
- 杭州智能模溫機(jī)生產(chǎn)廠家 2025-06-07
- 濱湖區(qū)組裝工控設(shè)備方案 2025-06-07