長寧區(qū)工程機器視覺系統(tǒng)編號
Blob檢測根據(jù)上面得到的處理圖像,,根據(jù)需求,,在純色背景下檢測雜質色斑,并且要計算出色斑的面積,,以確定是否在檢測范圍之內,。因此圖像處理軟件要具有分離目標,檢測目標,,并且計算出其面積的功能,。Blob分析(Blob Analysis)是對圖像中相同像素的連通域進行分析,該連通域稱為Blob,。經二值化(Binary Thresholding)處理后的圖像中色斑可認為是blob,。Blob分析工具可以從背景中分離出目標,并可計算出目標的數(shù)量,、位置,、形狀、方向和大小,,還可以提供相關斑點間的拓撲結構,。在處理過程中不是采用單個的像素逐一分析,而是對圖形的行進行操作,。圖像的每一行都用游程長度編碼(RLE)來表示相鄰的目標范圍,。這種算法與基于象素的算法相比,**提高處理速度。在一些不適于人工作業(yè)的危險工作環(huán)境或者人工視覺難以滿足要求的場合,,常用機器視覺來替代人工視覺,。長寧區(qū)工程機器視覺系統(tǒng)編號
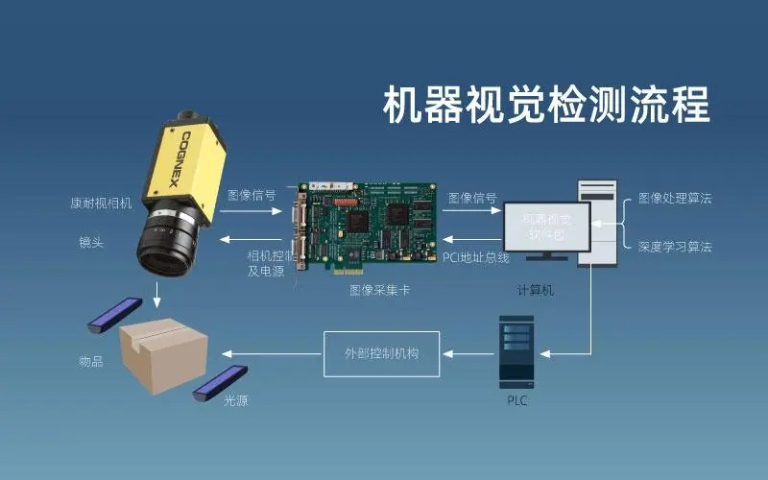
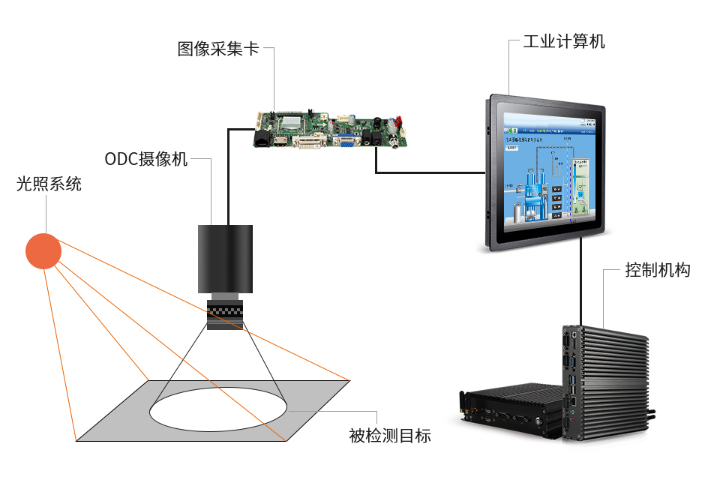
一個典型的工業(yè)機器視覺系統(tǒng)包括:光源、鏡頭(定焦鏡頭,、變倍鏡頭,、遠心鏡頭、顯微鏡頭),、 相機(包括CCD相機和COMS相機),、圖像處理單元(或圖像捕獲卡)、圖像處理軟件,、監(jiān)視器、通訊 / 輸入輸出單元等,。機器視覺檢測系統(tǒng)采用CCD照相機將被檢測的目標轉換成圖像信號,,傳送給**的圖像處理系統(tǒng),根據(jù)像素分布和亮度,、顏色等信息,,轉變成數(shù)字化信號,圖像處理系統(tǒng)對這些信號進行各種運算來抽取目標的特征,,如面積,、數(shù)量、位置,、長度,,再根據(jù)預設的允許度和其他條件輸出結果,包括尺寸,、角度,、個數(shù)、合格 / 不合格,、有 / 無等,,實現(xiàn)自動識別功能。奉賢區(qū)新能源機器視覺系統(tǒng)誠信為本由于布匹快速運動對光線產生反射,,圖像中可能會存在大量的噪聲,。
按同步方式劃分,可分為普通相機(內同步)和具有外同步功能的相機等,。圖像采集卡采集卡(2張)圖像采集卡只是完整的機器視覺系統(tǒng)的一個部件,,但是它扮演一個非常重要的角色。圖像采集卡直接決定了攝像頭的接口:黑白,、彩色,、模擬、數(shù)字等等。比較典型的是PCI或AGP兼容的捕獲卡,,可以將圖像迅速地傳送到計算機存儲器進行處理,。有些采集卡有內置的多路開關。例如,,可以連接8個不同的攝像機,然后告訴采集卡采用那一個相機抓拍到的信息,。有些采集卡有內置的數(shù)字輸入以觸發(fā)采集卡進行捕捉,當采集卡抓拍圖像時數(shù)字輸出口就觸發(fā)閘門,。
該系統(tǒng)主要利用線陣CCD的自掃描特性與被檢查鋼板X方向的移動相結合,,取得金屬板表面的三維圖像信息。⒊ 汽車車身檢測系統(tǒng)英國ROVER汽車公司800系列汽車車身輪廓尺寸精度的100%在線檢測,,是機器視覺系統(tǒng)用于工業(yè)檢測中的一個較為典型的例子,,該系統(tǒng)由62個測量單元組成,每個測量單元包括一臺激光器和一個CCD攝像機,,用以檢測車身外殼上288個測量點,。汽車車身置于測量框架下,通過軟件校準車身的精確位置,。測量單元的校準將會影響檢測精度,,因而受到特別重視。每個激光器/攝像機單元均在離線狀態(tài)下經過校準,。同時還有一個在離線狀態(tài)下用三坐標測量機校準過的校準裝置,,可對攝像頂進行在線校準。按分辨率劃分,,像素數(shù)在38萬以下的為普通型,,像素數(shù)在38萬以上的高分辨率型;

集成產品增多智能相機的發(fā)展預示了集成產品增多的趨勢,,智能相機是在一個單獨的盒內集成了處理器,、鏡頭、光源,、輸入/輸出裝置及以太網,,電話和 PDA 推動了更快、更便宜的精簡指令集計算機(RISC)的發(fā)展,,這使智能相機和嵌入式處理器的出現(xiàn)成為可能,。同樣,現(xiàn)場可編程門列陣(FPGA)技術的進步為智能相機增添了計算功能,,并為PC 機嵌入了處理器和高性能楨采集器,,智能相機結合處理大多數(shù)計算任務的FPGA,DSP和微處理器則會更具有智能性 ,。由于機器視覺系統(tǒng)可以快速獲取大量信息,,而且易于自動處理,,也易于同設計信息以及加工控制信息集成,因此,,在現(xiàn)代自動化生產過程中,,人們將機器視覺系統(tǒng)***地用于工況監(jiān)視、成品檢驗和質量控制等領域,??梢姽獾娜秉c是光能不能保持穩(wěn)定。長寧區(qū)工程機器視覺系統(tǒng)編號
頻閃光照明是將高頻率的光脈沖照射到物體上,,攝像機拍攝要求與光源同步,。長寧區(qū)工程機器視覺系統(tǒng)編號
70年代,機器視覺形成幾個重要研究分支:①目標制導的圖像處理,;②圖像處理和分析的并行算法,;③從二維圖像提取三維信息;④序列圖像分析和運動參量求值,;⑤視覺知識的表示,;⑥視覺系統(tǒng)的知識庫等。機器視覺的阿喀琉斯之踵:據(jù)麻省理工《技術評論》報道,,來自谷歌和OpenAI研究所的研究人員發(fā)現(xiàn)了機器視覺算法的一個弱點:機器視覺會被一些經過修改的圖像干擾,而人類可以很容易地發(fā)現(xiàn)這些圖像的修改之處,。 [7]機器視覺的應用主要有檢測和機器人視覺兩個方面:長寧區(qū)工程機器視覺系統(tǒng)編號
上海翌優(yōu)自動化科技有限公司在同行業(yè)領域中,,一直處在一個不斷銳意進取,不斷制造創(chuàng)新的市場高度,,多年以來致力于發(fā)展富有創(chuàng)新價值理念的產品標準,,在上海市等地區(qū)的機械及行業(yè)設備中始終保持良好的商業(yè)口碑,成績讓我們喜悅,,但不會讓我們止步,,殘酷的市場磨煉了我們堅強不屈的意志,和諧溫馨的工作環(huán)境,,富有營養(yǎng)的公司土壤滋養(yǎng)著我們不斷開拓創(chuàng)新,,勇于進取的無限潛力, 翌優(yōu)科技攜手大家一起走向共同輝煌的未來,,回首過去,,我們不會因為取得了一點點成績而沾沾自喜,相反的是面對競爭越來越激烈的市場氛圍,,我們更要明確自己的不足,,做好迎接新挑戰(zhàn)的準備,要不畏困難,,激流勇進,,以一個更嶄新的精神面貌迎接大家,,共同走向輝煌回來!
- 寶山區(qū)工程機器視覺系統(tǒng)聯(lián)系方式 2025-05-03
- 嘉定區(qū)特定機器視覺系統(tǒng)編號 2025-05-03
- 靜安區(qū)新能源自動化控制系統(tǒng)誠信合作 2025-05-02
- 青浦區(qū)工程自動化控制系統(tǒng)系列 2025-05-02
- 浦東新區(qū)直銷自動化控制系統(tǒng)市場價格 2025-05-02
- 靜安區(qū)特定機器視覺系統(tǒng)設計 2025-05-02
- 寶山區(qū)品質自動化控制系統(tǒng)市場價格 2025-05-02
- 上海直銷自動化控制系統(tǒng)市場價格 2025-05-02
- 黃浦區(qū)小型自動化控制系統(tǒng)發(fā)展 2025-05-02
- 普陀區(qū)進口自動化控制系統(tǒng)處理方法 2025-05-02
- 茂名低壓電機價格 2025-05-03
- 浙江數(shù)控雙頭鉆攻機生產廠家 2025-05-03
- 上海三角鉆頭哪家靠譜 2025-05-03
- 湖北橫剪機生產線 2025-05-03
- 江蘇立式鏜加工價格 2025-05-03
- 寧波道路普通貨物運輸作用 2025-05-03
- 泰州揭蓋洗碗機多少錢 2025-05-03
- 廣州蠟鑲機器人價格 2025-05-03
- 錫山區(qū)耐用金屬材料圖片 2025-05-03
- 高效能鋁箔塞墊機聯(lián)系人 2025-05-03