-
 廣東目標(biāo)檢測(cè)設(shè)備
廣東目標(biāo)檢測(cè)設(shè)備AI智能化檢測(cè)是打造領(lǐng)域智慧建設(shè)的一大舉措,。通過在攝像頭中植入視覺處理AI圖像處理板,定制AI檢測(cè)算法,,就能夠?qū)崿F(xiàn)對(duì)物體的質(zhì)量檢測(cè),。在智能檢測(cè)領(lǐng)域,圖像處理板的性能和算法的精度則是影響檢測(cè)效果的關(guān)鍵所在,。不同行業(yè)的作業(yè)環(huán)境不同,,對(duì)于圖像處理板的性能需求也就不同...
2025-02-28 -
 視頻傳輸
視頻傳輸今年的珠海航展當(dāng)中驚艷眾人的除了殲系列空中裝備和一些地面反無裝備外,海上的防務(wù)裝備同樣先進(jìn)得可怕,。這款名為虎鯨的隱身三體無人艇,,是同類型產(chǎn)品中遙遙前列的存在?;ⅥL無人艇(JARI-USV-A)長(zhǎng)58米,,寬23米,寬4米,,排水量420噸,,使用柴電雙模推進(jìn)系統(tǒng),比...
2025-02-28 -
 甘肅可靠目標(biāo)檢測(cè)銷售廠家
甘肅可靠目標(biāo)檢測(cè)銷售廠家長(zhǎng)時(shí)間一直進(jìn)行這樣的圖像標(biāo)注工作,,那無疑是枯燥而乏味的,,手酸不說,更多的是精神上的折磨,,進(jìn)而效率大打折扣,。但這又是算法提升的必要途徑,無法跳過,,當(dāng)項(xiàng)目緊急時(shí),,甚至需要多人加班加點(diǎn)趕進(jìn)度。這樣的痛苦現(xiàn)狀急需改變,!慧視光電的算法工程師為了提高這一的效率,開發(fā)了一個(gè)...
2025-02-27 -
 內(nèi)蒙古目標(biāo)檢測(cè)應(yīng)用
內(nèi)蒙古目標(biāo)檢測(cè)應(yīng)用無人機(jī)在軍備領(lǐng)域有著突出作用,,它不僅能幫助進(jìn)行信息偵查,,還能進(jìn)行智能炮彈高空精細(xì)打擊,。其中,在智能精細(xì)打擊領(lǐng)域,,少不了人工智能的參與,。通過人工智能的控制分析,能夠?qū)崿F(xiàn)對(duì)打擊目標(biāo)的AI識(shí)別,。選擇這樣的方式,,能夠減少末端打擊時(shí)對(duì)方電子干擾的影響,盡可能保證無人機(jī)的...
2025-02-27 -
 河南高效目標(biāo)識(shí)別遠(yuǎn)程控制
河南高效目標(biāo)識(shí)別遠(yuǎn)程控制無人機(jī)被廣泛應(yīng)用于目標(biāo)識(shí)別,,其機(jī)動(dòng)靈活的特點(diǎn)對(duì)地面的被跟蹤對(duì)象而言簡(jiǎn)直就是降維打擊,。搭載攝像頭以及跟蹤板卡等設(shè)備后,無人機(jī)可以實(shí)現(xiàn)自主飛行,,然后通過植入高精度的AI目標(biāo)識(shí)別算法,,就能夠分析攝像頭范圍內(nèi)的物體,通過AI對(duì)特征的進(jìn)一步提取分析,,就能夠單獨(dú)識(shí)別出目標(biāo)...
2025-02-26 -
 安徽視頻壓縮與傳輸供應(yīng)商
安徽視頻壓縮與傳輸供應(yīng)商上可九天攬?jiān)?,下可五洋捉鱉,這是當(dāng)下中國(guó)武器的發(fā)展方向,。此次珠海航展向我們展示了海陸空各個(gè)領(lǐng)域的震撼裝備,,其中“九天”無人機(jī)的驚艷亮相,坐穩(wěn)了空中航母這一稱號(hào),?!熬盘臁弊鳛橐豢羁伸`活配置的重型無人機(jī),翼展達(dá)25米,,比較大起飛重量16噸,,最大載荷能力6噸,比較大...
2025-02-26 -
 福建算法定制AI智能人臉識(shí)別
福建算法定制AI智能人臉識(shí)別夏季,,為了消減酷暑的炎熱,,下水消暑成了老老少少的選擇,這也就給溺水事故埋下了隱患,。以前,,人工巡視雖然能夠起到一定作用,但是仍不能避免時(shí)間差帶來的弊端,,每當(dāng)發(fā)現(xiàn)后可能就為時(shí)已晚,。而利用無人機(jī),則可以開展不間斷,、高密度,、大范圍的巡視工作,其靈活機(jī)動(dòng)的特點(diǎn)在巡湖巡河...
2025-02-26 -
 寧夏低壓線目標(biāo)識(shí)別型號(hào)
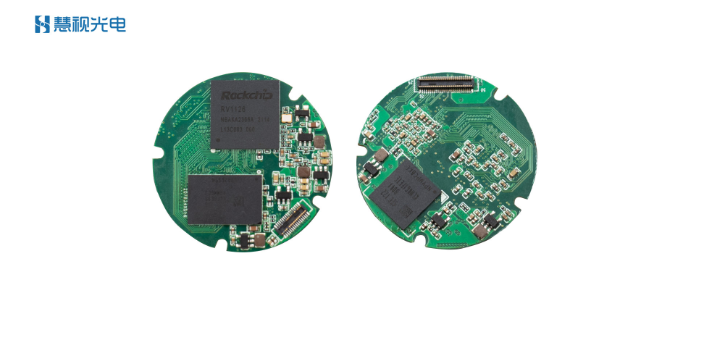
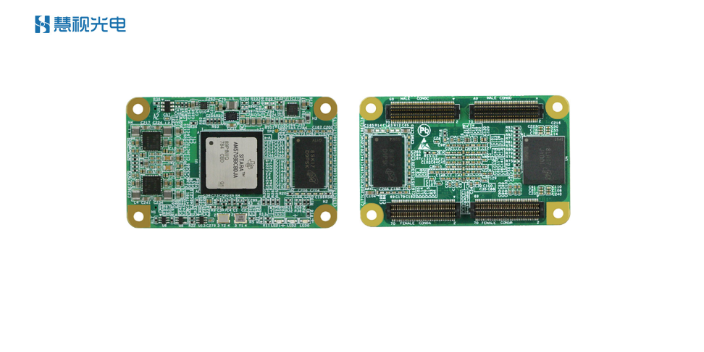
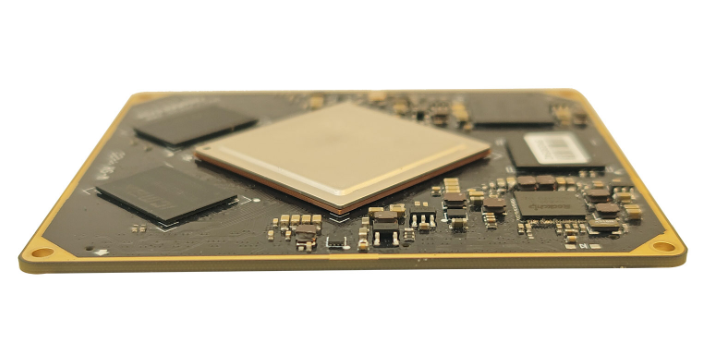
寧夏低壓線目標(biāo)識(shí)別型號(hào)成都慧視光電技術(shù)有限公司開發(fā)的Viztra-HE030圖像處理板,,利用國(guó)產(chǎn)化高性能芯片RK3588開發(fā)而成,,它能夠?qū)崿F(xiàn)6.0TOPS的算力,,能夠輕松應(yīng)對(duì)糧庫(kù)內(nèi)部復(fù)雜的環(huán)境,成都慧視可以根據(jù)客戶使用的相機(jī)接口進(jìn)行圖像處理板的接口深度定制,,實(shí)現(xiàn)快速的AI害蟲識(shí)別,。...
2025-02-25 -
 湖北目標(biāo)跟蹤有什么
湖北目標(biāo)跟蹤有什么無人機(jī)在農(nóng)業(yè)領(lǐng)域能夠?qū)崿F(xiàn)高效率的施肥、播種等操作,。但是不同的作業(yè)環(huán)境對(duì)于無人機(jī)的工作性能要求不一樣,,同樣的方案在平原地區(qū)適用,在高原地區(qū)就不行,。因此針對(duì)于特殊作業(yè)環(huán)境需要制定不同的智慧化方案。像青藏高原這樣地貌復(fù)雜,、低氣壓、大溫差的特點(diǎn),,參與智能化工作的各個(gè)部...
2025-02-25 -
 云南智慧園區(qū)AI智能供應(yīng)商
云南智慧園區(qū)AI智能供應(yīng)商在我們生活生產(chǎn)中,,許多小型化的無人機(jī)類似于昆蟲,憑借其機(jī)動(dòng),、靈活,、體積小的特點(diǎn)能夠在復(fù)雜的環(huán)境中執(zhí)行飛行任務(wù),。但是再精細(xì)化的操控,也難以做到完全避免障礙物的阻礙,,因此需要采用AI避障的功能,。AI避障中很重要的一點(diǎn)是要對(duì)環(huán)境進(jìn)行自動(dòng)化的識(shí)別。利用高性能的AI圖像...
2025-02-25 -
甘肅目標(biāo)跟蹤產(chǎn)品
跟蹤任務(wù)與檢測(cè)任務(wù)有著密切的關(guān)系,。從輸入輸出的形式上來看,這兩個(gè)任務(wù)是極為相似的,。它們均以圖片(或者視頻幀)作為模型的輸入,,經(jīng)過處理后,,輸出一堆目標(biāo)物置的矩形框,。它們之間比較大的區(qū)別體現(xiàn)在對(duì)“目標(biāo)物體”的定義上,。對(duì)于檢測(cè)任務(wù)來說,,目標(biāo)物體屬于預(yù)先定義好的某幾個(gè)...
2025-02-24 -
 哪些圖像處理板功能
哪些圖像處理板功能成都慧視光電技術(shù)有限公司的利用RK3588開發(fā)的Viztra-HE030圖像處理板同利用RK3399pro開發(fā)的ViztraME025圖像處理板對(duì)比:CPU方面:3588CPU架構(gòu)更先進(jìn),,核心數(shù)8核(4大4小),,rk3399pro只有6核(2大4?。籒PU方...
2025-02-24 -
江蘇如何目標(biāo)跟蹤
在智慧農(nóng)業(yè)領(lǐng)域可以分為人工干涉和無人值守2種,。系統(tǒng)提供了良好的人機(jī)界面,,用戶可以通過系統(tǒng)的視頻顯示區(qū)觀看攝像機(jī)攝制的現(xiàn)場(chǎng)視頻,此時(shí),,用戶可以人工通過系統(tǒng)提供的按鈕以各種方式控制云臺(tái),,即人工可以干涉監(jiān)控的過程。系統(tǒng)在大部分情況下處于無人值守的工作狀態(tài),,當(dāng)監(jiān)控中心...
2025-02-24 -
 企業(yè)目標(biāo)跟蹤好選擇
企業(yè)目標(biāo)跟蹤好選擇目標(biāo)檢測(cè)和跟蹤在許多應(yīng)用中都具有重要的意義,,例如智能監(jiān)控、自動(dòng)駕駛和人機(jī)交互等,。傳統(tǒng)的目標(biāo)檢測(cè)算法需要多次掃描圖像,,并使用復(fù)雜的特征提取和分類器來識(shí)別目標(biāo)。然而,,這些方法在實(shí)時(shí)性和準(zhǔn)確性上存在一定的限制,。隨著YOLO算法的出現(xiàn),目標(biāo)檢測(cè)和跟蹤領(lǐng)域取得了重大突破...
2025-02-24 -
 如何目標(biāo)跟蹤多少錢
如何目標(biāo)跟蹤多少錢多目標(biāo)跟蹤是指在連續(xù)的圖像中,,通過目標(biāo)檢測(cè)算法識(shí)別出每一幀中的目標(biāo),,并在時(shí)間上跟蹤它們的位置和狀態(tài)。但目標(biāo)會(huì)不斷發(fā)生尺度,、形變,、遮擋等變化,而且還會(huì)有目標(biāo)出現(xiàn)和消失的情況,再加上視頻采集端的相機(jī)所處環(huán)境可能受到外界影響導(dǎo)致抖動(dòng)的情況(例如無人機(jī)高空檢測(cè)),,就會(huì)...
2025-02-23 -
 海南目標(biāo)跟蹤要多少錢
海南目標(biāo)跟蹤要多少錢目前,,采用圖像識(shí)別技術(shù)來實(shí)現(xiàn)無人機(jī)規(guī)避其他障礙物是一個(gè)有效的方法。通過在無人機(jī)上植入圖像識(shí)別模塊,,這個(gè)模塊由圖像處理板和相機(jī)組合而成,,通過算法的賦能,,就能針對(duì)不同物體實(shí)現(xiàn)快速AI識(shí)別,,然后實(shí)現(xiàn)規(guī)避,。而在圖像處理板的選擇上,成都慧視開發(fā)的Viztra-LE026...
2025-02-23 -
四川目標(biāo)跟蹤推薦廠家
云臺(tái)的旋轉(zhuǎn)將直接改變攝像機(jī)的視野,,因此對(duì)于云臺(tái)的控制必須謹(jǐn)慎且準(zhǔn)確,。錯(cuò)誤的控制會(huì)使目標(biāo)從視野中消失,導(dǎo)致跟蹤的失敗,。此外,如果云臺(tái)的控制幅度過小,,可能會(huì)達(dá)不到目標(biāo)回到視野中心的目的,目標(biāo)也同樣極易丟失,。相反如果在對(duì)目標(biāo)運(yùn)動(dòng)速度有可靠估計(jì)的前提下,,提前將目標(biāo)移到...
2025-02-23 -
如何目標(biāo)跟蹤銷售廠家
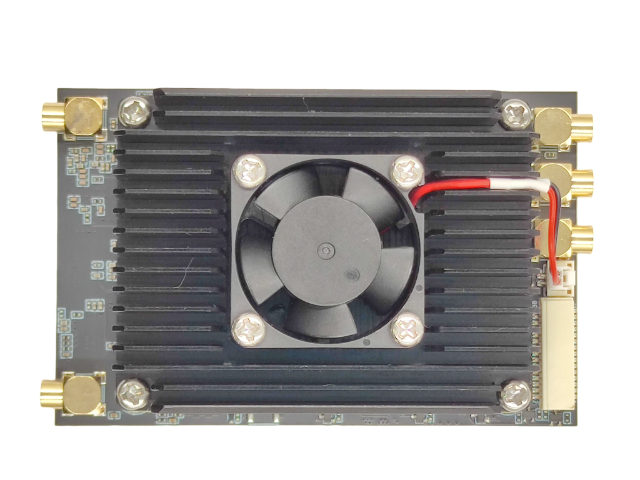
經(jīng)過算法的不斷升級(jí)驗(yàn)證,,Viztra-LE026圖像處理板能夠以30Hz的幀率跟蹤像素為2*2的目標(biāo),,能夠識(shí)別**小像素為12*12的目標(biāo),整個(gè)延遲不高于100ms,,識(shí)別精度能夠大于85%,。無人機(jī)作業(yè),續(xù)航是使用者首要考慮的。Viztra-LE026的設(shè)計(jì)正是...
2025-02-23 -
 四川目標(biāo)跟蹤銷售廠家
四川目標(biāo)跟蹤銷售廠家實(shí)現(xiàn)這些功能的技術(shù)中,,圖像處理基于AI圖像處理板這一傳感器,。板卡具備快速圖像處理識(shí)別的硬件能力,植入相應(yīng)的AI算法,,無人機(jī)就相當(dāng)于裝上了“智慧眼”,,而且這個(gè)“智慧眼”居于高空,能夠在一個(gè)定點(diǎn),,俯瞰大范圍,,實(shí)時(shí)監(jiān)控貨物的存放狀態(tài)。遠(yuǎn)程控制技術(shù)基于網(wǎng)絡(luò)通信,,通過和...
2025-02-23 -
 人防目標(biāo)跟蹤互惠互利
人防目標(biāo)跟蹤互惠互利2010年以前,,目標(biāo)跟蹤領(lǐng)域大部分采用一些經(jīng)典的跟蹤方法,比如Meanshift,、Particle Filter和Kalman Filter,,以及基于特征點(diǎn)的光流算法等。Meanshift方法是一種基于概率密度分布的跟蹤方法,,使目標(biāo)的搜索一直沿著概率梯度上升的...
2025-02-23 -
 無源目標(biāo)跟蹤多少錢
無源目標(biāo)跟蹤多少錢之所以能產(chǎn)生這種可見運(yùn)動(dòng)或表觀運(yùn)動(dòng),是因?yàn)槲矬w以不同的速度在不同的方向上移動(dòng),或者是因?yàn)橄鄼C(jī)在移動(dòng)(或者兩者都有)在很多應(yīng)用程序中,跟蹤表觀運(yùn)動(dòng)都是極其重要的,。它可用來追蹤運(yùn)動(dòng)中的物體,以測(cè)定它們的速度、判斷它們的目的地,。對(duì)于手持?jǐn)z像機(jī)拍攝的視頻,可以用這種方...
2025-02-23 -
新疆信息化目標(biāo)跟蹤
在目標(biāo)跟蹤領(lǐng)域,,場(chǎng)景信息與目標(biāo)狀態(tài)的融合十分重要,首先,,場(chǎng)景信息包含了豐富的環(huán)境上下文信息,對(duì)場(chǎng)景信息進(jìn)行分析及充分利用,能夠有效地獲取場(chǎng)景的先驗(yàn)知識(shí),降低復(fù)雜的背景環(huán)境以及場(chǎng)景中與目標(biāo)相似的物體的干擾;同樣地,對(duì)目標(biāo)的準(zhǔn)確描述有助于提升檢測(cè)與跟蹤算法的準(zhǔn)確性...
2025-02-23 -
 四川電力運(yùn)維視頻壓縮與傳輸森林
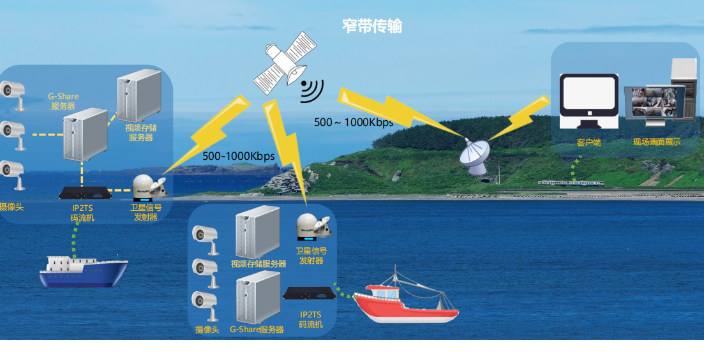
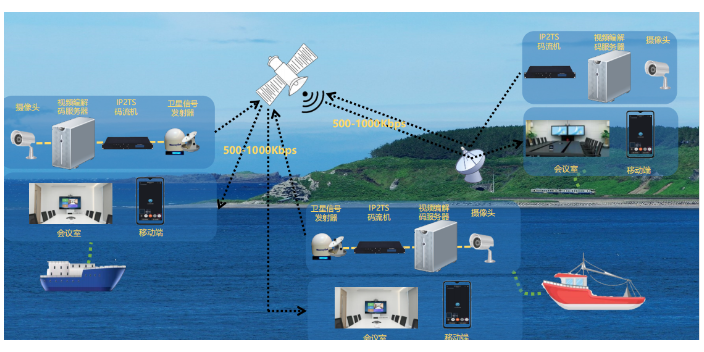
四川電力運(yùn)維視頻壓縮與傳輸森林GW系列全天候現(xiàn)場(chǎng)應(yīng)急布控系統(tǒng)布控系統(tǒng)融合我司超星光全彩夜視攝像機(jī)和視頻智能編碼設(shè)備,,實(shí)現(xiàn)在4G/5G網(wǎng)絡(luò)條件下前端標(biāo)準(zhǔn)視頻流經(jīng)智能編碼壓縮后回傳中心,碼率降低30%-90%,,且保證視頻高清流暢,,視頻分辨率、幀率以及時(shí)長(zhǎng)與原始視頻保持一致,,不損失特征點(diǎn),、不影響...
2025-02-22 -
 電力應(yīng)急目標(biāo)跟蹤功效
電力應(yīng)急目標(biāo)跟蹤功效美國(guó)再度要求臺(tái)積電停止出口7納米芯片給大陸,目前看來國(guó)產(chǎn)AI圖像處理的性能還得由RK3588穩(wěn)坐,,不久前傳出了瑞芯微RK3688至少在一兩年內(nèi)無法推出,,因此對(duì)于許多有高性能AI圖像處理板需求的客戶無需再等了,。當(dāng)下,選擇RK3588至少還可以保持性能***兩三年...
2025-02-22 -
 天津無源目標(biāo)檢測(cè)
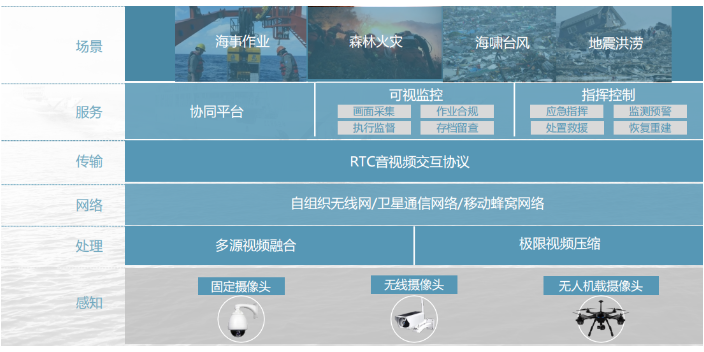
天津無源目標(biāo)檢測(cè)工業(yè)4.0中智能智造技術(shù)應(yīng)用愈發(fā)多,,這之中,,機(jī)器視覺占有很重要的地位。機(jī)器視覺技術(shù)通過傳感器和AI算法的集成,,能夠模擬人眼視覺處理功能,,對(duì)工業(yè)生產(chǎn)的產(chǎn)品、安防等進(jìn)行識(shí)別檢測(cè),,然后進(jìn)行處理,,實(shí)現(xiàn)流程自動(dòng)化。不僅能夠提升生產(chǎn)效率,,還能保障產(chǎn)品質(zhì)量,。整個(gè)系統(tǒng)架構(gòu)包括...
2025-02-22 -
 內(nèi)蒙古多系統(tǒng)適配目標(biāo)檢測(cè)
內(nèi)蒙古多系統(tǒng)適配目標(biāo)檢測(cè)目標(biāo)識(shí)別算法是一種深度學(xué)習(xí)算法,其聰明程度需要我們不斷訓(xùn)練,,這就得益于大量的圖像標(biāo)注,,通過對(duì)車輛行駛環(huán)境的數(shù)據(jù)集的大量標(biāo)注,能夠讓AI更加聰明,,標(biāo)注得越多,,識(shí)別的精度就可能越高。但是大量的圖像標(biāo)注跟工作顯然會(huì)耗費(fèi)大量的時(shí)間精力,。而慧視SpeedDP的出現(xiàn)很好地...
2025-02-22 -
 高性能目標(biāo)檢測(cè)應(yīng)用
高性能目標(biāo)檢測(cè)應(yīng)用經(jīng)過算法的不斷升級(jí)驗(yàn)證,,Viztra-LE026圖像處理板能夠以30Hz的幀率跟蹤像素為2*2的目標(biāo),能夠識(shí)別**小像素為12*12的目標(biāo),,整個(gè)延遲不高于100ms,,識(shí)別精度能夠大于85%。無人機(jī)作業(yè),,續(xù)航是使用者首要考慮的,。Viztra-LE026的設(shè)計(jì)正是...
2025-02-22 -
西藏?zé)o線目標(biāo)檢測(cè)
種比較常見的安防模式其實(shí)不難。在傳統(tǒng)監(jiān)控?cái)z像頭的基礎(chǔ)上加裝AI圖像處理板就可以實(shí)現(xiàn),。例如,,成都慧視開發(fā)的Viztra-HE030圖像處理板,這塊板卡采用了瑞芯微旗艦級(jí)芯片RK3588,,強(qiáng)大的處理性能能夠提供6.0TOPS的算力,,然后我司根據(jù)場(chǎng)館的應(yīng)用方向定制關(guān)...
2025-02-22 -
哪里有目標(biāo)跟蹤多少錢
2010年以前,目標(biāo)跟蹤領(lǐng)域大部分采用一些經(jīng)典的跟蹤方法,,比如Meanshift,、Particle Filter和Kalman Filter,以及基于特征點(diǎn)的光流算法等,。Meanshift方法是一種基于概率密度分布的跟蹤方法,,使目標(biāo)的搜索一直沿著概率梯度上升的...
2025-02-22 -
 浙江目標(biāo)檢測(cè)應(yīng)用
浙江目標(biāo)檢測(cè)應(yīng)用此前,九號(hào)電動(dòng)車的自平衡技術(shù)一次次刷新人們的認(rèn)知,,而其中一款探索版車型,,甚至加入了智能攝像頭,能夠識(shí)別行人,、障礙物,,自動(dòng)規(guī)劃行駛路線,達(dá)成自動(dòng)駕駛的目的,。很多人好奇這種怎么做到的,,其實(shí)很簡(jiǎn)單,車輛內(nèi)部攝像頭安裝了具備圖像處理的傳感器,。這種傳感器就是圖像處理板,,...
2025-02-22